datetime:2023/10/16 11:03
author:nzb
该项目来源于大佬的动手学ROS2
1.什么是单片机MCU
一、什么是MCU?和CPU什么区别?
你知道我们电脑用的处理器叫做CPU(Central Processing Unit 中央处理器),那你知道现在的智能家电里的处理器是什么吗?比如可以连WIFI和蓝牙的空调,比如在寒冷的冬天里常用的小米电暖器是什么处理器吗?

答案就是微型控制单元-MCU(Micro Control Unit),我们常说单片微型计算机,简称就是单片机,上面两张图就是两种不同类型的单片机。
如果你有组装过电脑,你应该知道,电脑想要运行起来除了CPU还要内存条、硬盘等设备才能正常运行,而单片机则将CPU、内存、蓝牙等外设集成到了一起,这一点也是CPU和MCU之间的主要区别。
二、单片机为什么有那么多种类?
在上面的单片机介绍中,放了两种单片机图片,事实上单片机的种类是非常之多的,用在洗衣机上的单片机、用在3D打印机的单片机和用在电暖气上的单片机都是不同的类型,那为什么有那么多分类呢?
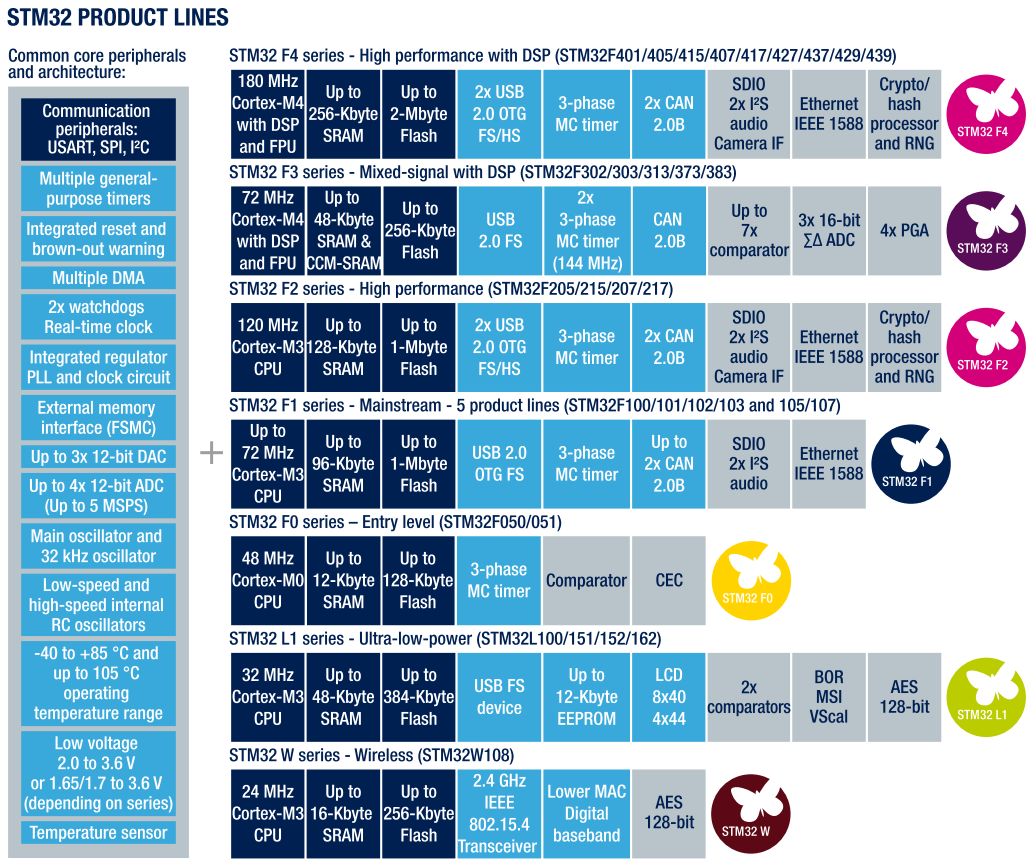
答案是不同单片机具有不同的配置,比如不同的主频,慢的有几兆赫兹,快的有几百兆赫兹,不同的外设,比如有的支持USB、有的支持WIFI、有的支持蓝牙、还有的甚至多加了个处理器(比如卖的MicroROS学习板主控就是双核的)。
2.微处理器开发平台
上一节我们对单片机硬件进行了简单介绍,但单片机运行不仅仅需要硬件,类似于电脑需要配套的操作系统一样,单片机还需要与之配套的软件,本节我们学习下常见的开发平台。
我们的MicroROS板采用的单片机是ESP32芯片,该芯片支持蓝牙和WIFI并且是双核的国产芯片,用途很广,所以就介绍下该芯片的常用的几个开发平台。
一、官方平台-ESPIDF(ESP IoT Development FrameWork)
官网地址:https://www.espressif.com/zh-hans/products/sdks/esp-idf

所谓官方平台就是单片机的厂商,针对单片机提供的开发框架,该框架为我们提供了一个C/C++ SDK,我们通过include相应的头文件就可以实现对硬件的控制。
下面这一段是官方介绍
ESP-IDF 是乐鑫官方的物联网开发框架,适用于 ESP32、ESP32-S、ESP32-C 和 ESP32-H 系列 SoC。它基于 C/C++ 语言提供了一个自给自足的 SDK,方便用户在这些平台上开发通用应用程序。ESP-IDF 目前已服务支持数以亿计的物联网设备,并已开发构建了多种物联网产品,例如照明、消费电子大小家电、支付终端、工控等各类物联网设备。
ESP-IDF的核心其实是基于开源的FreeRTOS优化而来的,而FreeRTOS是一个迷你(几k大小)的实时操作系统内核,所以别看它小,照样跑了个操作系统。
展示一段ESP_IDF版本的HelloWorld,感受一下
/*
* SPDX-FileCopyrightText: 2010-2022 Espressif Systems (Shanghai) CO LTD
*
* SPDX-License-Identifier: CC0-1.0
*/
#include <stdio.h>
#include <inttypes.h>
#include "sdkconfig.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
void app_main(void)
{
printf("Hello world!\n");
vTaskDelay(1000 / portTICK_PERIOD_MS);
fflush(stdout);
esp_restart();
}
二、Arduino平台
官网地址:https://www.arduino.cc/en/about

Arduino是一款便捷灵活、方便上手的开源电子原型平台,本次MicroROS学习就是基于该平台进行开发。
展示一段Arduino版本的HelloWorld代码,感受一下
#include <Arduino.h>
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
Serial.println("Hello World!");
}
void loop() {
// put your main code here, to run repeatedly:
}
三、MicroPython平台
大家都知道,人生苦短,我用Python,针对单片机平台,有没有可能使用Python开发呢?——MicroPython来了。
MicroPython是 Python 3 语言的精简实现 ,包括Python标准库的一小部分,经过优化可在微控制器和受限环境中运行。
同样的我们的MicroROS板同时也是支持使用MicroPython进行开发,只需要刷入相应的固件即可。
展示一段MicroPython的HelloWorld代码,感受下它的简单
print('Hello, World!')
四、对比与总结
上面介绍了三种常见的平台,做个表格对比下三种平台的优缺点。
| 平台名称 | 优点 | 缺点 |
|---|---|---|
| ESP_IDF | 官方出品、测试完成度高、安全稳定、有官方支持、适合产品化、支持microROS | 三方教程少、工程复杂、新手不友好 |
| Arduino | 社区庞大,教程丰富、新手友好,简单易用、支持microROS | 封装较多 |
| MicroPython | Python语言、简单易用 | 解释执行,效率低下,封装较多,不支持microROS |
看完上面的对比,对于新手来说选择Ardunio平台容易入门且教程丰富,并且ESP32单片机是官方出品了Arduino支持(开源地址:https://github.com/espressif/arduino-esp32)。
了解完单片机开发平台,下一节我们正式搭建开发环境,然后开始编写我们的第一个HelloWorld工程!
3.搭建PlateFormIO开发环境
我们开始介绍并搭建PlatformIO(以下简称PIO)的开发环境。因为网络原因,PIO搭建起来是一个挺困难的事情,但是在一键安装里添加了一键安装PIO,为你解决这一难题。
开始之前,想和你约定好本次学习之旅的开发环境和平台,这里采用的开发环境信息如下:
系统版本:Ubuntu 22.04(虚拟机实体机都可)
ROS版本:ROS2-Humble
一、PIO介绍
PIO是一个面向嵌入式开发的专业协作平台,它提供了一个适配VsCode的插件,它具有一个用户友好且可扩展的集成开发环境,具有一组专业开发工具,提供现代而强大的功能,以加快并简化嵌入式产品的创建和交付。
二、安装PIO
PIO的开发我们采用VsCode,所以在这之前你需要安装VsCode,VsCode安装可以使用一键安装,快速且稳定。
2.1 安装VsCode
运行一键安装指令,之后选择7即可
wget http://fishros.com/install -O fishros && . fishros
安装完成VsCode后,推荐你继续使用一键安装来安装PIO。
2.2 安装PIO(可跳过)
注意这一步仅适用Ubuntu22.04系统,非该系统请直接跳过
继续使用一键安装,选项12
wget http://fishros.com/install -O fishros && . fishros
2.3 安装VsCode插件
打开VsCode,我们还需安装一个PlatformIO插件就能正常Work了。
任意终端输入code,或者在菜单中找到vscode都可以打开vscode,接着在扩展中搜索PlatformIO,选择后点击安装即可。
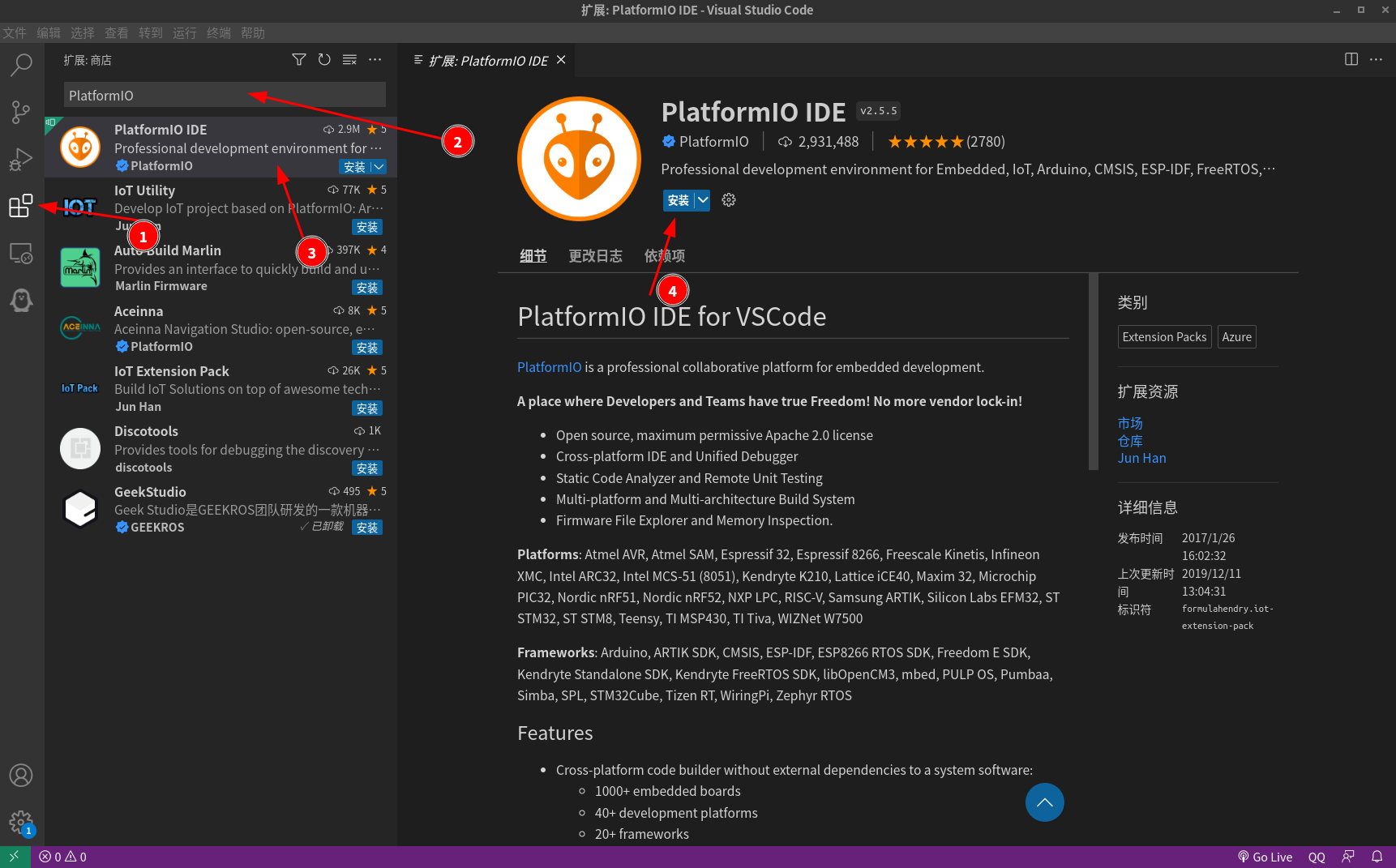
安装完成后在侧方栏应该可以看到一个蚂蚁头的图标,这个就是PIO,点击图标,点击上访的Open就可以打开PIO HOME。
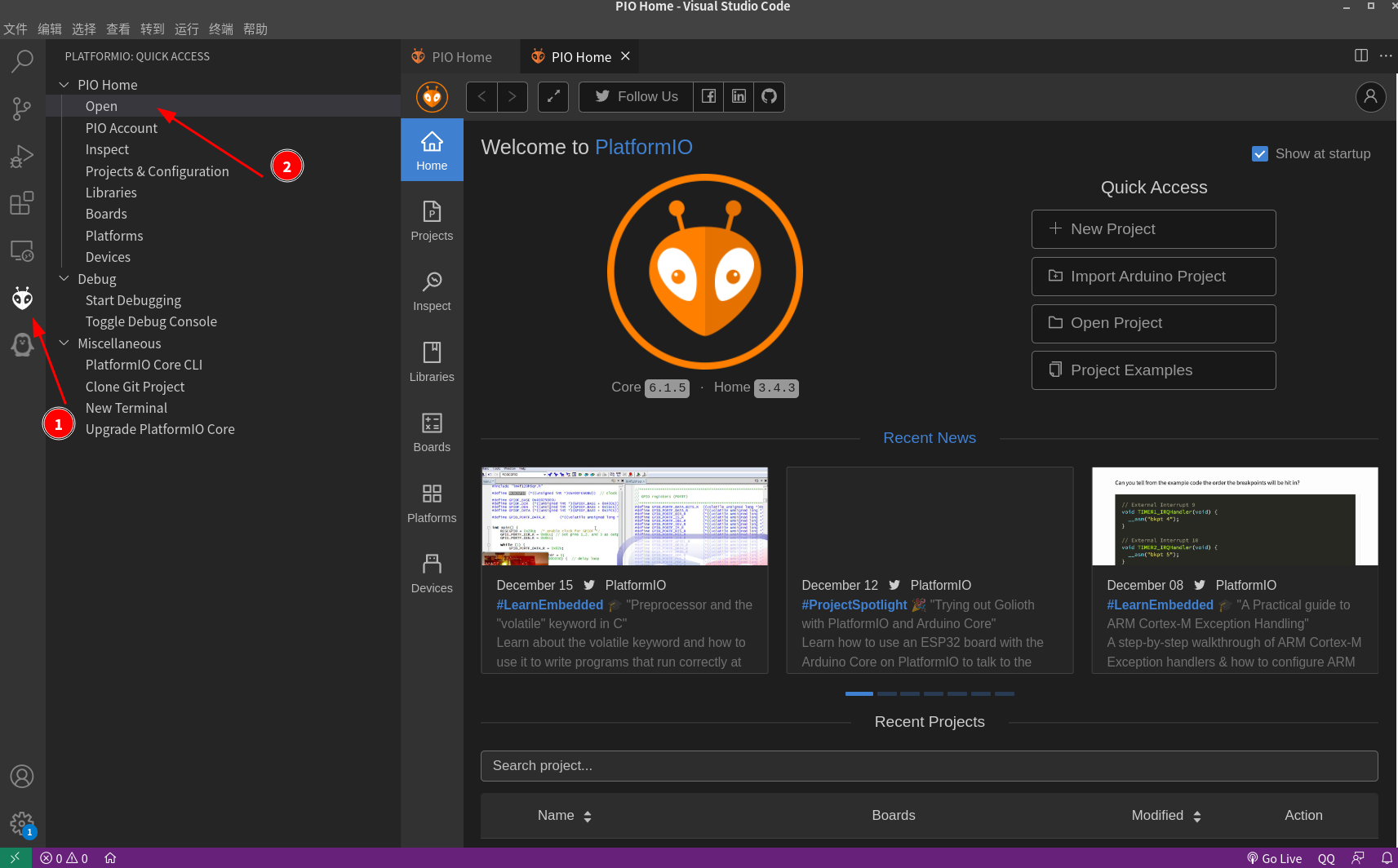
三、新建工程测试
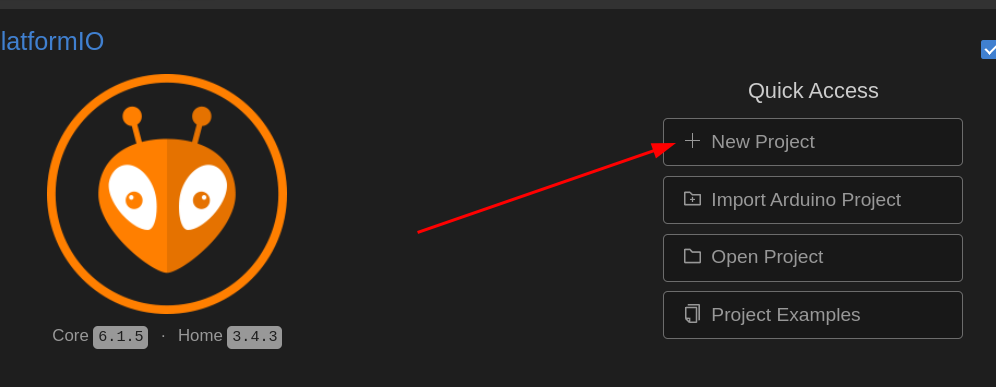
接着我们就可以利用PIO建立第一个Arduino工程进行测试,首先点击New Project。
四步新建工程
- 输入工程名
example01_helloworld - 选择开发板,这里选择
Adafruit ESP32 Feather - 选择开发框架,这里我们用Arduino,PIO还支持IDF(IoT Development FrameWork)
- 开发位置可以选择默认的位置,也可以自定义位置
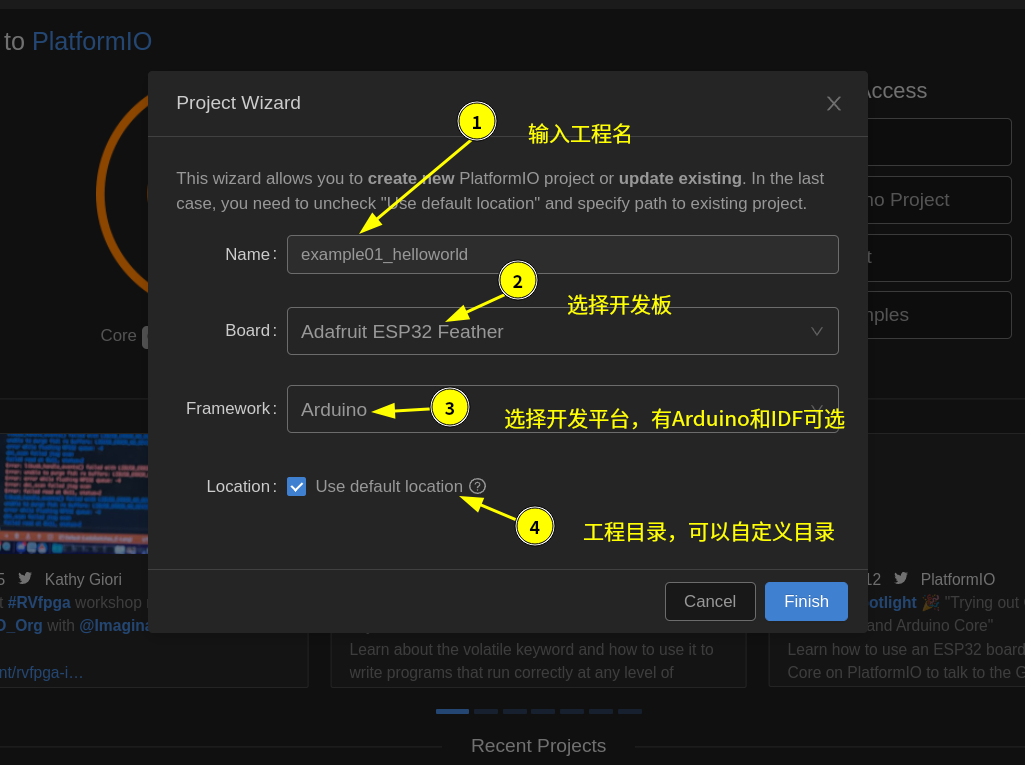
最后点击Finish即可,这样我们就得到了一个支持ESP32的Arduino工程。
4.PIO工程结构&构建方式
上一节我们搭建好了PIO的开发环境,并新建了第一个工程。本节我们详细了解下该工程,了解我们需要在哪里写代码,在哪里改配置。
一、工程目录概述

首先展开工程,可以看到工程一共有8个部分如上图所示。
- PIO配置文件
- VsCode配置文件
- 头文件放置目录
- 库文件放置目录
- 代码资源放置目录,主函数就在这里
- 测试文件放置目录
- git忽略文件
- platformio配置文件
二、在哪里写代码?
打开src/main.cpp就是我们工程的程序入口文件,打开该文件,已经默认给我们生成了9行代码,后续的主要开发就在这里进行。
#include <Arduino.h>
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
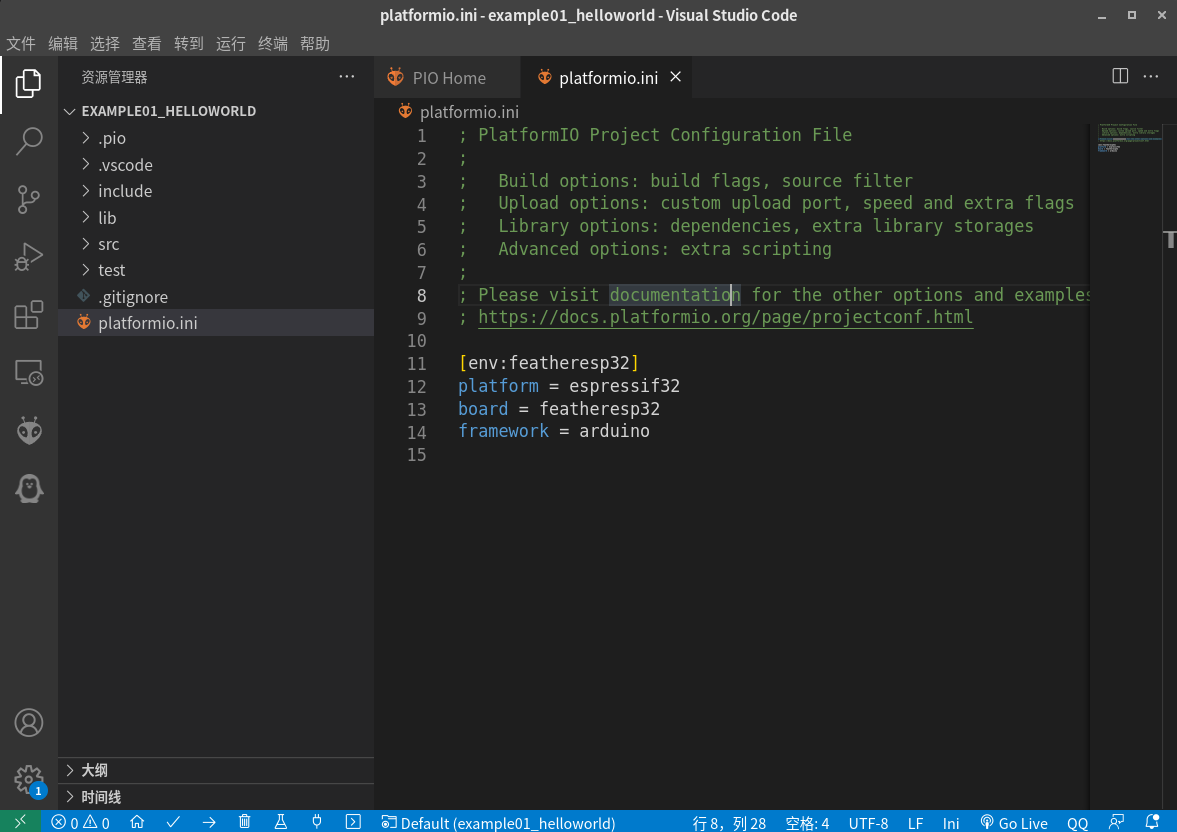
三、工程配置文件-platformio.ini
打开工程主目录下的platformio.ini文件,预生成的配置文件如下
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
这里用到的主要配置有四个
[env:featheresp32]编译环境platform = espressif32,单片机平台board = featheresp32,开发板framework = arduino,开发框架-arduino
后续还有很多关于工程的配置都放在这里,同时我们可以添加一条配置board_build.f_cpu = 240000000L,将单片机的主频提高到240MHZ的主频。
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
board_build.f_cpu = 240000000L
四、编译工程
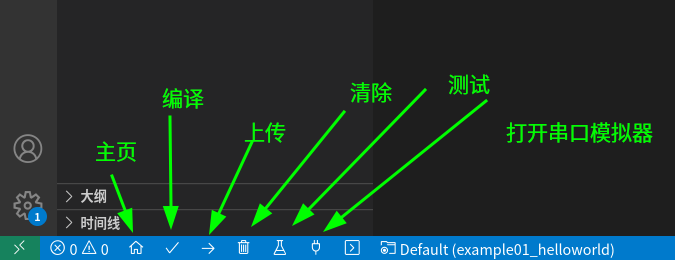
在VsCode中编译PIO,编译工程和将编译结果下载到开发板上都非常的方便。
编译工程可以手动点击左下角的对号进行,其他操作也可以通过按钮进行。
点击编译按钮,看到如下界面则代表编译成功
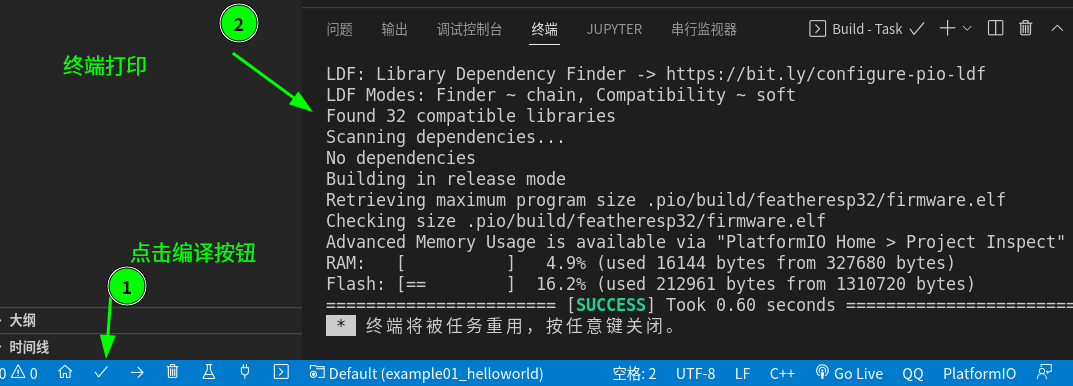
其中打印信息有很多有用的提示,比如工程占用的RAM和Flash大小(可以理解为系统程序大小)
RAM: [ ] 4.9% (used 16144 bytes from 327680 bytes)
Flash: [== ] 16.2% (used 212961 bytes from 1310720 bytes)
编译完成工程,在.pio/build/featheresp32目录下可以看到firmware.bin,这个就是我们工程编译之后生成的二进制文件,将该文件下载到开发板上就可以运行了。
五、PIO快捷键
这里再介绍几个PIO的快捷键,在接下来的学习中你肯定能用到
| 快捷键 | 内容 |
|---|---|
| Ctrl+Alt+B | 编译工程 |
| Ctrl+Alt+U | 将程序上传烧录到开发板 |
| Ctrl+Alt+S | 打开串口Monitor |