datetime:2025/04/24 11:47
author:nzb
混合规划(Hybrid Planning)
MoveIt的运动规划遵循“感知-规划-执行”(Sense-Plan-Act)流程:
- 感知(Sense):获取环境与机器人状态信息。
- 规划(Plan):通过规划器计算运动轨迹。
- 执行(Act):通过轨迹控制器一次性执行规划结果。
该方案适用于静态已知环境的全局运动规划,但在动态或不确定场景(如给人递水、在黑板上写字)中表现不足。例如:
- 环境动态变化(如移动障碍物)。
- 任务本身存在不确定性(如粉笔书写时需实时调整压力,且粉笔长度逐渐缩短)。
什么是混合规划?
混合规划是一种结合异构规划器的运动规划方法,通过全局与局部规划器的协同工作提升鲁棒性和实时性。该理念在导航领域(如navigation2)已广泛应用。
MoveIt的混合规划架构包含两个核心组件:
全局规划器(Global Planner)
- 任务:解决全局运动规划问题(类似传统“Sense-Plan-Act”中的规划器)。
- 特性:
- 完备性:保证能找到解(但计算耗时较长)。
- 非实时安全:不保证在截止时间内完成。
- 输出:生成初始解或迭代优化解。
局部规划器(Local Planner)
- 任务:在执行过程中持续生成机器人指令,跟随全局轨迹并处理局部问题。
- 特性:
- 实时性:快速响应传感器反馈,通常需满足实时安全(Real-time-safe)。
- 确定性:避免运动抖动或不稳定。
- 功能:
- 融合或调整连续的全局参考轨迹。
- 动态避障(跟随全局路径时避开近距离碰撞)。
- 适应局部约束(如根据表面不平度调整力控、基于视觉反馈修正工具位姿)。
- 局部轨迹优化与时间参数化(计算效率更高)。
- 全局与局部规划器的协作逻辑
- 依赖关系:局部规划器基于全局参考轨迹工作,避免陷入局部极小值。
- 异常处理:若局部规划器无法解决约束(如陷入局部极小),可触发全局重新规划。
- 事件驱动:支持自定义事件逻辑,适应不同应用场景和规划器类型。
规划器对比
| 全局规划器 | 局部规划器 |
|---|---|
| 生成全局解轨迹 持续优化轨迹路径 |
遵循全局参考轨迹 解决局部问题约束 可处理传感器输入 优化局部解决方案 计算控制器指令 |
| 完整 计算时间不受限制 非实时安全 不一定具有确定性 |
可能陷入局部最小值 计算时间短 实时安全(取决于求解器) 确定性 |
| OMPL 计划器 STOMP TrajOpt 笛卡尔运动计划器 Pilz 工业运动计划器 MTC |
IK 求解器,雅可比 Potential field planner 轨迹优化算法 模型预测控制 (MPC) 基于传感器的优化控制 |
混合规划可用于多种使用情况。大多数应用可分为以下三种情况。
- 在线运动规划: 全局规划器创建初始全局解决方案,并不断对其进行优化。与此同时,局部规划器执行参考轨迹,并将更新的轨迹段融合到其中。
- 反应式运动: 全局规划器用于修复失效的解决方案(重新规划),而本地规划器则在碰撞前减速或停止
- 自适应运动: 本地规划器用于调整全局解决方案,以适应动态条件,例如保持工具与不平表面的稳定接触
混合规划架构
下图描述了构成混合规划架构的基本插件类型和 ROS 接口。
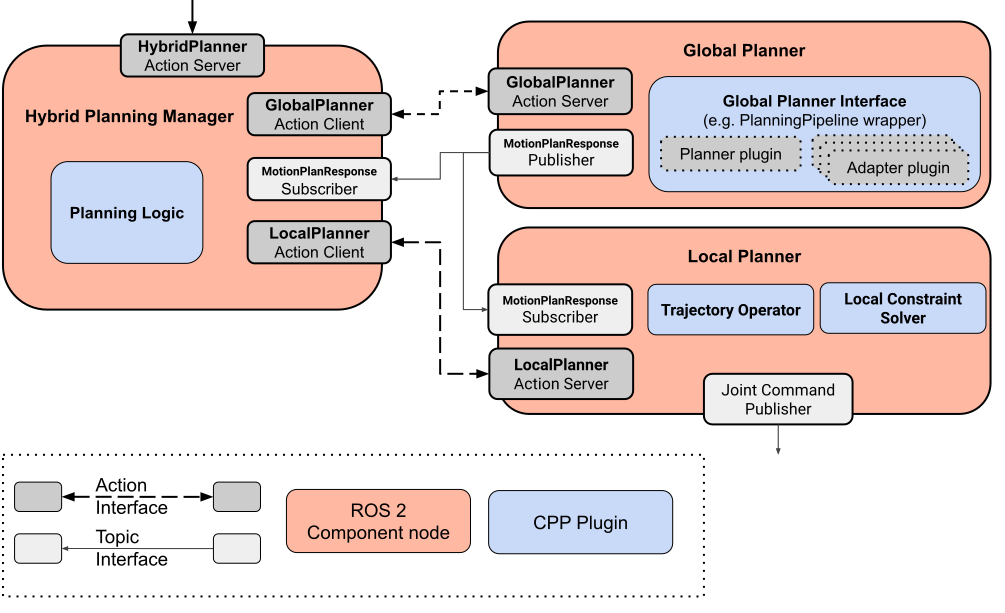
该架构由三个ROS组件节点构成:
混合规划管理器 (Hybrid Planning Manager)
- 提供用于混合规划请求的ROS动作接口
- 运行规划逻辑并协调各规划器
全局规划器 (Global Planner)
- 解决全局规划问题并发布解决方案轨迹
- 生成全局参考轨迹
局部规划器 (Local Planner)
- 处理传入的全局轨迹更新
- 基于机器人状态、环境信息和参考轨迹解决局部规划问题
- 向机器人驱动器发送位置/速度控制指令
架构特点:
通用性与可定制性
组件间仅通过ROS 2消息接口交互,可轻松替换具体实现插件化设计
接口设计最小化,最大限度抽象算法实现细节,开发者可专注核心算法开发高复用性
相同组件可适配不同硬件配置或规划场景
混合规划管理器
该组件是架构的“大脑”,其主要功能是处理HybridPlanner动作请求,并基于规划逻辑插件协调运动规划与执行过程。规划逻辑通过PlanningLogic插件实现,采用事件驱动设计。事件由字符串标识符定义,可能触发针对全局或局部规划器的动作调用或取消。下图展示了一个简单规划逻辑的事件日志示例:
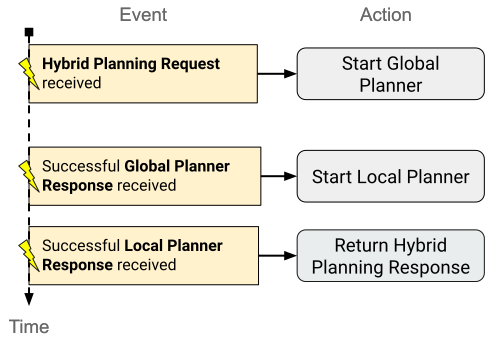
事件触发机制由Hybrid Planning动作请求以及全局和局部规划器的动作反馈消息触发。在本示例中,Hybrid Planning Manager在接收到混合规划请求后启动全局规划器。当全局轨迹生成后,启动局部规划器;局部规划器完成后,Hybrid Planning Manager返回混合规划响应。
自定义规划逻辑通过自定义Planning Logic插件,可以将通用事件映射到架构提供的可用动作,例如“启动全局规划”、“停止轨迹执行”或“切换到局部规划器约束x”。这使得运动规划行为具有高度的可定制性和适应性。
全局规划器
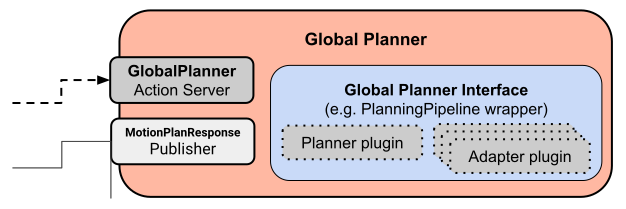
全局规划器是该架构中最简单的组件。它提供了一个动作服务器来处理全局规划器请求。这些请求包括常见的 MotionPlanRequests,由全局规划器插件处理。默认情况下,这只是 MoveIt 的规划管道,但从技术上讲,任何类型的规划器,甚至 MTC 都可以在这里使用。规划结果通过动作反馈进行报告,解决方案轨迹将发布到局部规划器以供进一步处理。
局部规划器
局部规划器运行一个动作服务器,用于处理来自混合规划管理器的请求。该动作用于启动和停止执行,并可配置运行时参数,如约束条件或求解器类型。
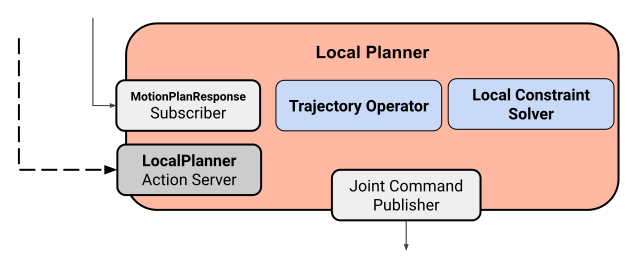
局部规划器的实现基于两个插件:
轨迹操作器 (Trajectory Operator)
- 维护全局参考轨迹
- 处理来自全局规划器的轨迹更新
- 监控当前机器人状态
局部约束求解器 (Local Constraint Solver)
- 实现迭代求解算法,基于参考轨迹和局部约束生成机器人控制指令
- 可能包含动态处理传感器输入或事件更新的接口
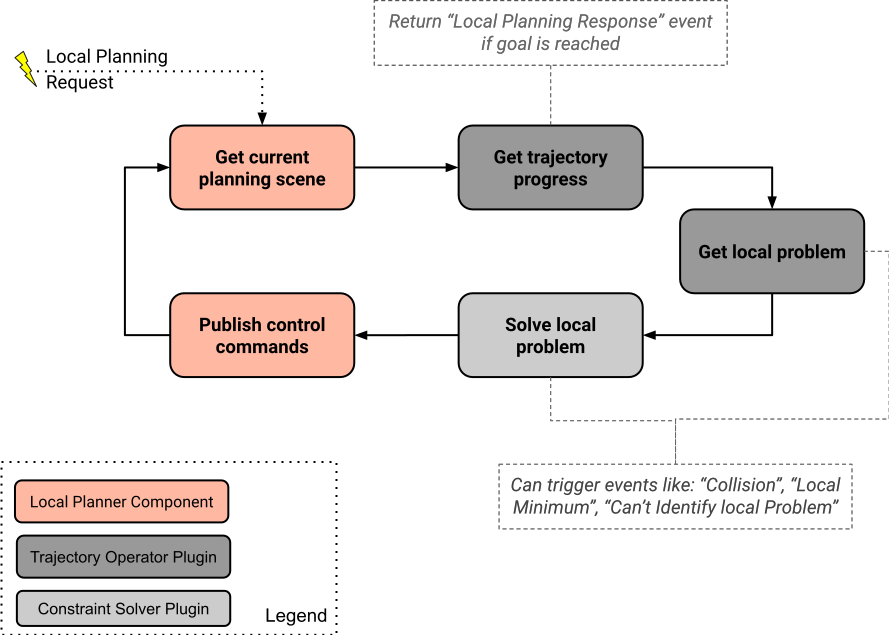
局部规划器的工作流程:
- 每次迭代中,局部规划器请求当前规划场景,并将当前机器人状态与参考轨迹匹配。
- 如果目标已到达,局部规划动作成功完成。
- 否则,基于当前机器人状态识别局部规划问题并求解。
- 最终,将生成的控制指令发布到机器人控制器。
混合规划器的工作原理
混合规划器的运行时行为可以通过绘制工作流图来理解,该图展示了不同组件的通信通道和事件。
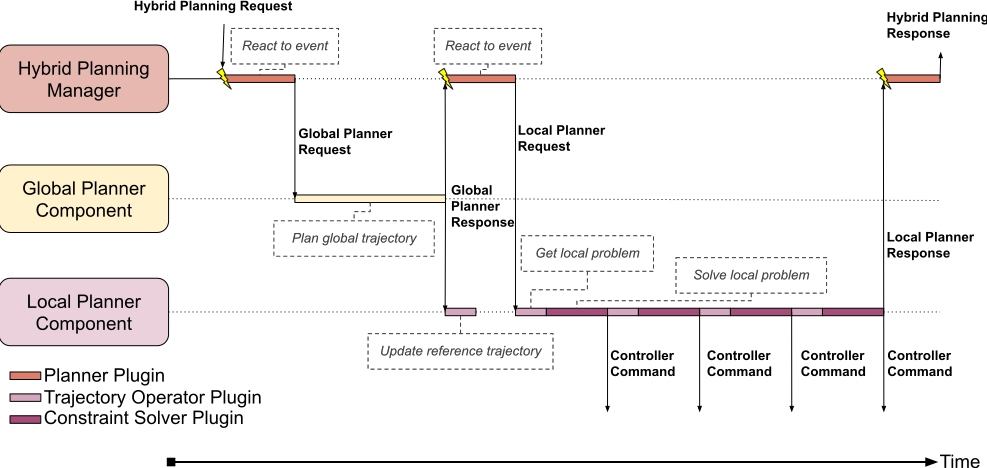
成功轨迹执行的工作流:
- 混合规划请求触发混合规划管理器。
- 混合规划管理器调用全局规划器。
- 全局规划器计算并发布轨迹,轨迹被混合规划管理器和局部规划器接收。
- 局部规划器处理新轨迹,但仅在混合规划管理器调用后开始执行。
- 局部规划器逐步执行参考轨迹,到达最终状态后返回动作响应。
- 混合规划管理器返回成功的混合规划响应。
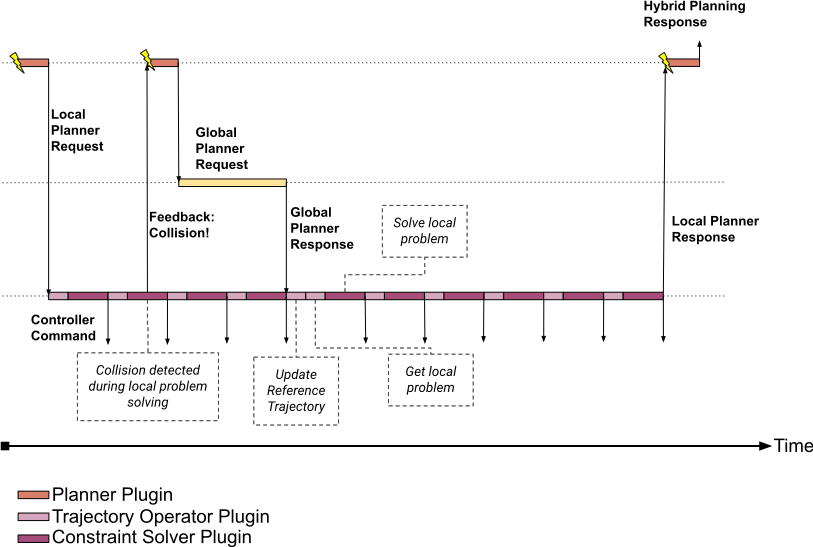
复杂场景:动态避障与重规划
- 初始全局轨迹计算后,碰撞物体发生变化,局部规划器检测到即将发生的碰撞并暂停执行。
- 局部规划器重新调用全局规划器以生成新的无碰撞轨迹。
- 在全局规划器计算新轨迹期间,局部规划器保持机器人当前位置以避免碰撞。
- 全局规划器发布新轨迹后,局部规划器的轨迹操作器插件将更新融入参考轨迹。
- 局部规划器继续执行更新后的参考轨迹,绕过碰撞物体。
混合规划示例教程
如果您想在应用中使用混合规划或进行实验,请查看混合规划示例教程。