datetime:2022/04/11 15:07
author:nzb
图像处理
图像滤波
图像降噪,使图像更清晰,更平滑
均值滤波
blur1 = cv2.blur(noise_img, (3,3)),使用3 * 3的卷积核
方框滤波:基本和均值一样,可以选择归一化
归一化:计算均值滤波
blur2 = cv2.boxFilter(noise_img,-1, (3,3), normalize=True)-1是固定值,一般不需要改变
未归一化:容易越界(未取均值,超过255,一旦越界就取255)
blur3 = cv2.boxFilter(noise_img,-1, (3,3), normalize=False)
高斯滤波:更看重权重,离目标远的权重小,离目标近的权重大
gussian = cv2.GaussianBlur(noise_img, (5, 5), 1),使用5*5的卷积核
中值滤波
median = cv2.medianBlur(noise_img, 5),使用5*5的卷积核
形态学处理
处理二值化图像,获取轮廓 腐蚀=瘦身,膨胀=增肥
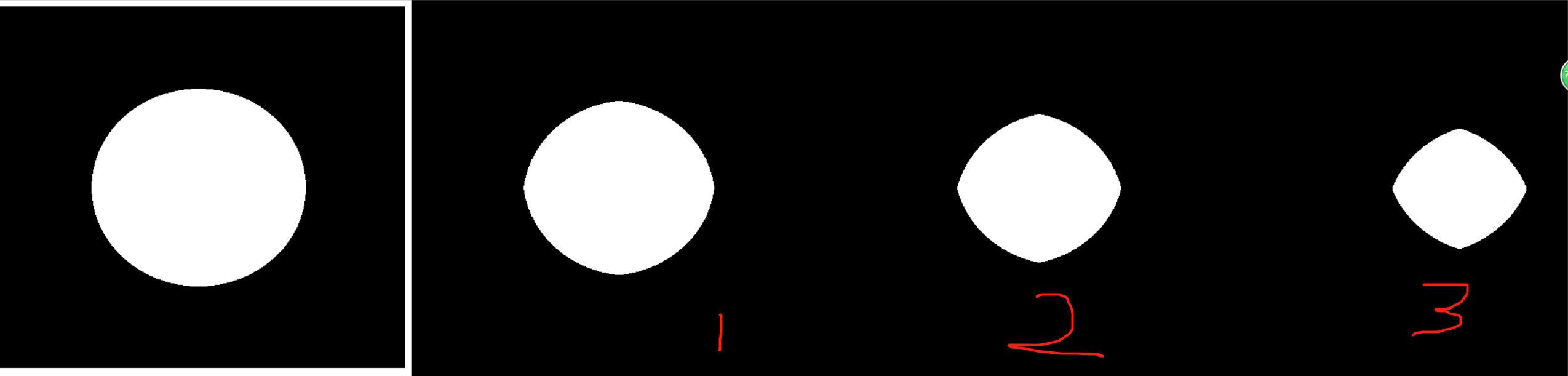
腐蚀(Erode)
kernel = np.ones((3,3), dtype=np.uint8),3*3卷积核erode_img = cv2.erode(img, kernel, iterations=1),iterations:迭代(腐蚀)次数不同腐蚀次数的变化
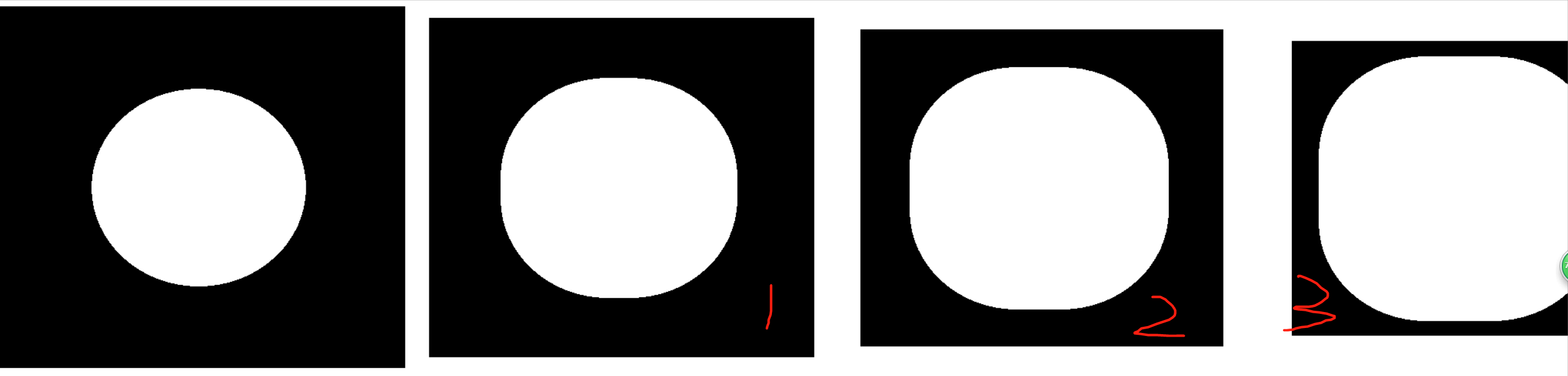
膨胀(Dilate)
kernel = np.ones((3,3), dtype=np.uint8),3*3卷积核dilate_img = cv2.dilate(erosion, kernel, iterations=1)不同膨胀次数的变化
腐蚀完后膨胀恢复之前的结果,两者互为逆运算
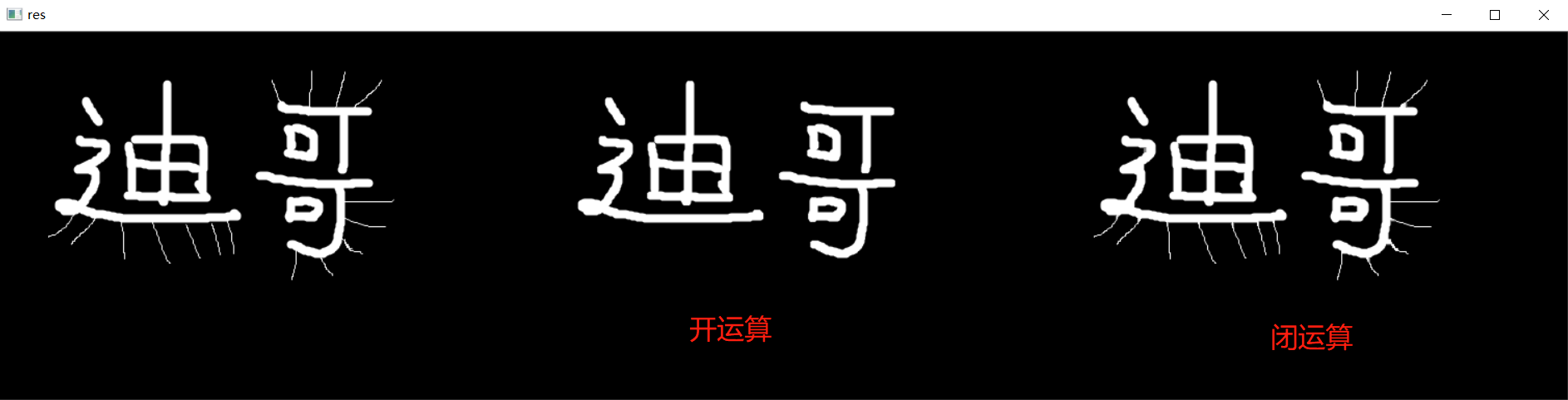
开运算与闭运算
open_close_kernel = np.ones((5,5), np.uint8)开运算:先腐蚀,后膨胀,开运算可以用来去除仅存的小块像素。
openimg = cv2.morphologyEx(img, cv2.MORPH_OPEN, open_close_kernel)
闭运算:先膨胀,后腐蚀
closeimg = cv2.morphologyEx(img, cv2.MORPH_CLOSE, open_close_kernel)
梯度运算
kernel = np.ones((7,7), np.uint8),7*7卷积核梯度 = 膨胀 - 腐蚀
形态学梯度为经过膨胀操作(
dilate)的图像与经过腐蚀操作(erode)的图像的差,可以用于抽出物体的边缘。gradient = cv2.morphologyEx(pie, cv2.MORPH_GRADIENT, kernel)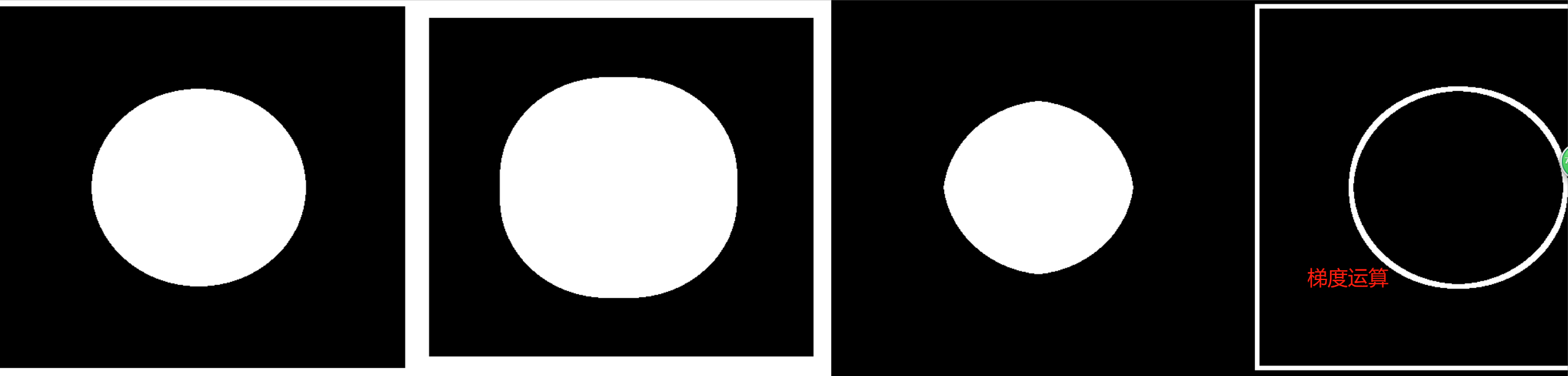
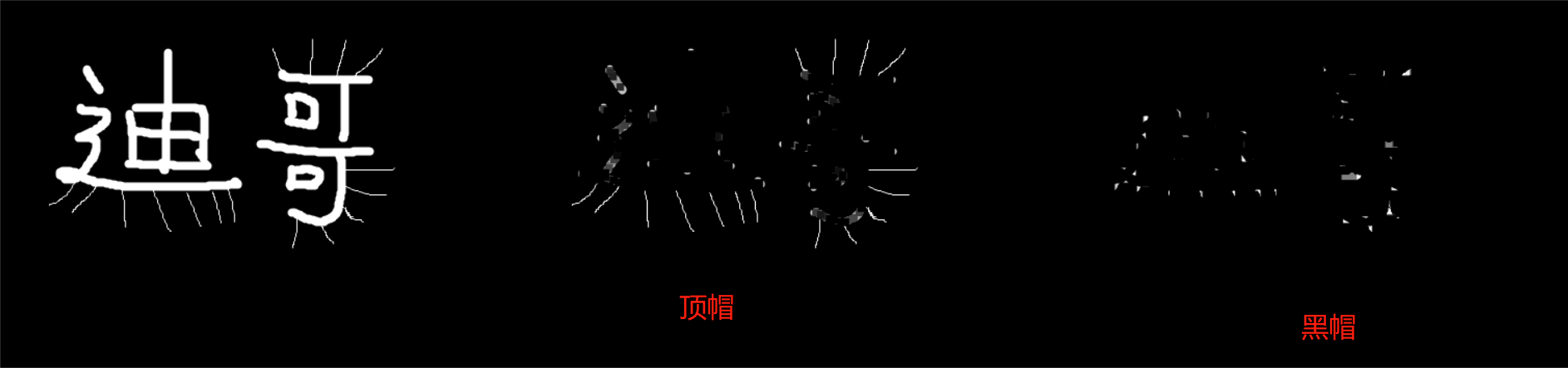
顶帽和黑帽
kernel = np.ones((7,7), np.uint8),7*7卷积核顶帽:
顶帽 = 原始输入 - 开运算tophat = cv2.morphologyEx(img1, cv2.MORPH_TOPHAT, kernel)
黑帽:
黑帽 = 闭运算 - 原始输入blackhat = cv2.morphologyEx(img1, cv2.MORPH_BLACKHAT, kernel)