datetime:2025/01/10 14:45
author:nzb
该项目来源于mujoco_learning
3D绘制
mujoco 提供显示基础几何体和 mujoco 提供的一些特殊渲染几何体。查看文档可知 mjv_initGeom 函数能在渲染场景中增加几何体,mjv_connector可以用mjv_initGeom初始化的几何体绘制提供的一些特殊形状(如箭头,直线等)。
mujoco 显示画面的原理是通过 mjv_updateScene 将仿真数据储存到 mjvScene 中,这是已经处理好的几何数据,接下来使用 mjr_render 传递给 opengl 渲染。我们在绘制过程中是要在仿真的几何数据处理完之后,加入绘制信息,再交给 opengl 渲染。
在 mjvScene 中添加信息,其实是直接在 mjvScene 的 geoms 后面续写,而且要增加 ngeom 长度。这里通过注释可以理解, mjvScene 根据 ngeom 确定几何体数量再从 geoms 中获取资源。

初始化几何体mjv_initGeom函数原型:

mjv_connector函数原型:

geom是传入的仅绘制的几何体,需要使用mjv_initGeom初始化,type见下面,width是绘制的宽度,这个是对于
渲染出来的画面的宽度,from起点,to终点
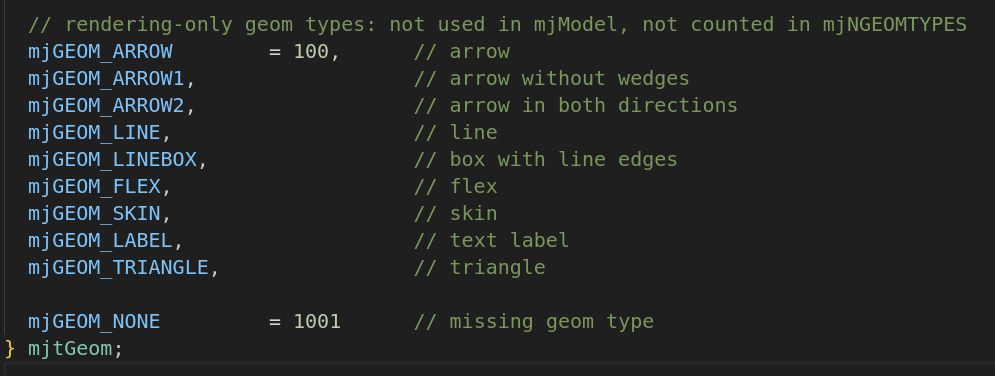
这里是可以绘制的几何形状类型,分别是箭头,无楔形箭头,双向箭头,直线。
*演示——绘制几何体函数:*void draw_geom(mjvScene *scn, int type,mjtNum *size, mjtNum *pos,mjtNum* mat, float rgba[4]) {
scn->ngeom += 1;
mjvGeom *geom = scn->geoms + scn->ngeom - 1;
mjv_initGeom(geom, type, size, pos, mat, rgba);
}
......
mjtNum size[3] = {0.3, 0, 0};
mjtNum pos[3] = {0, 0, 1.0};
mjtNum mat[9] = {1, 0, 0, 0, 1, 0, 0, 0, 1};
draw_geom(&scn, mjGEOM_SPHERE,size, pos, mat, color);
void draw_line(mjvScene *scn, mjtNum *from, mjtNum *to, mjtNum width,
float* rgba) {
scn->ngeom += 1;
mjvGeom *geom = scn->geoms + scn->ngeom - 1;
mjv_initGeom(geom, mjGEOM_SPHERE, NULL, NULL, NULL, rgba);
mjv_connector(geom, mjGEOM_LINE, width, from, to);
}
......
mjtNum from[3] = {0, 0, 0};
mjtNum to[3] = {0, 1, 1};
float color[4] = {0, 1, 0, 1};
draw_line(&scn, from, to, 20, color);
void draw_arrow(mjvScene *scn, mjtNum *from, mjtNum *to, mjtNum width,
float rgba[4]) {
scn->ngeom += 1;
mjvGeom *geom = scn->geoms + scn->ngeom - 1;
mjv_initGeom(geom, mjGEOM_SPHERE, NULL, NULL, NULL, rgba);
mjv_connector(geom, mjGEOM_ARROW, width, from, to);
}
......
mjtNum from[3] = {0, 0, 0};
mjtNum to[3] = {0, 1, 1};
float color[4] = {0, 1, 0, 1};
draw_arrow(&scn, from, to, 20, color);
mjv_updateScene(m, d, &opt, NULL, &cam, mjCAT_ALL, &scn);
draw_geom(&scn, mjGEOM_SPHERE,size, pos, mat, color);
draw_line(&scn, from, to, color);
draw_arrow(&scn, from, to, 20, color);
mjr_render(viewport, &scn, &con);
这里要注意在 mjv_updateScene函数之后,mjr_render函数之前调用。
2D绘制
字体尺寸的初始化:
 查阅文档我们可知2D绘制要在mjr_render之后进行
查阅文档我们可知2D绘制要在mjr_render之后进行

MJAPI void mjr_text(int font, const char* txt, const mjrContext* con,
float x, float y, float r, float g, float b);
font:字号,使用mjtFont中定义的
txt:文本
con:mjrContext
x,y:渲染界面比例位置,取值[0-1)
r,g,b:字体颜色
MJAPI void mjr_overlay(int font, int gridpos, mjrRect viewport,
const char* overlay, const char* overlay2, const mjrContext* con);
font:字号,使用mjtFont中定义的
gridpos:绘制位置,使用mjtGridPos中定义的
mjrRect:mjrRect,界面矩形
overlay:第一列
overlay2:第二列
con:mjrContext
MJAPI void mjr_rectangle(mjrRect viewport, float r, float g, float b, float a);
mjrRect:mjrRect,矩形
rgba:颜色
MJAPI void mjr_label(mjrRect viewport, int font, const char* txt,
float r, float g, float b, float a, float rt, float gt, float bt,
const mjrContext* con);
viewport:标签位置
font:字号,使用mjtFont中定义的
txt:文本
rgba:标签底色
rt,gt,bt:文字颜色
con:mjrContext
代码
draw.cpp
#include <cmath>
#include <cstdio>
#include <cstring>
#include <GLFW/glfw3.h>
#include <mujoco/mjvisualize.h>
#include <mujoco/mujoco.h>
#include <iostream>
// MuJoCo data structures
mjModel *m = NULL; // MuJoCo model
mjData *d = NULL; // MuJoCo data
mjvCamera cam; // abstract camera
mjvOption opt; // visualization options
mjvScene scn; // abstract scene
mjrContext con; // custom GPU context
// mouse interaction
bool button_left = false;
bool button_middle = false;
bool button_right = false;
double lastx = 0;
double lasty = 0;
// keyboard callback
void keyboard(GLFWwindow *window, int key, int scancdataode, int act,
int mods) {
// backspace: reset simulation
if (act == GLFW_PRESS && key == GLFW_KEY_BACKSPACE) {
mj_resetData(m, d);
mj_forward(m, d);
}
}
// mouse button callback
void mouse_button(GLFWwindow *window, int button, int act, int mods) {
// update button state
button_left =
(glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_LEFT) == GLFW_PRESS);
button_middle =
(glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_MIDDLE) == GLFW_PRESS);
button_right =
(glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_RIGHT) == GLFW_PRESS);
// update mouse position
glfwGetCursorPos(window, &lastx, &lasty);
}
// mouse move callback
void mouse_move(GLFWwindow *window, double xpos, double ypos) {
// no buttons down: nothing to do
if (!button_left && !button_middle && !button_right) {
return;
}
// compute mouse displacement, save
double dx = xpos - lastx;
double dy = ypos - lasty;
lastx = xpos;
lasty = ypos;
// get current window size
int width, height;
glfwGetWindowSize(window, &width, &height);
// get shift key state
bool mod_shift = (glfwGetKey(window, GLFW_KEY_LEFT_SHIFT) == GLFW_PRESS ||
glfwGetKey(window, GLFW_KEY_RIGHT_SHIFT) == GLFW_PRESS);
// determine action based on mouse button
mjtMouse action;
if (button_right) {
action = mod_shift ? mjMOUSE_MOVE_H : mjMOUSE_MOVE_V;
} else if (button_left) {
action = mod_shift ? mjMOUSE_ROTATE_H : mjMOUSE_ROTATE_V;
} else {
action = mjMOUSE_ZOOM;
}
// move camera
mjv_moveCamera(m, action, dx / height, dy / height, &scn, &cam);
}
// scroll callback
void scroll(GLFWwindow *window, double xoffset, double yoffset) {
// emulate vertical mouse motion = 5% of window height
mjv_moveCamera(m, mjMOUSE_ZOOM, 0, -0.05 * yoffset, &scn, &cam);
}
std::vector<float> get_sensor_data(const mjModel *model, const mjData *data,
const std::string &sensor_name) {
int sensor_id = mj_name2id(model, mjOBJ_SENSOR, sensor_name.c_str());
if (sensor_id == -1) {
std::cout << "no found sensor" << std::endl;
return std::vector<float>();
}
int data_pos = model->sensor_adr[sensor_id];
std::vector<float> sensor_data(model->sensor_dim[sensor_id]);
for (int i = 0; i < sensor_data.size(); i++) {
sensor_data[i] = data->sensordata[data_pos + i];
}
return sensor_data;
}
/*--------绘制直线--------*/
void draw_line(mjvScene *scn, mjtNum *from, mjtNum *to, mjtNum width,
float *rgba) {
scn->ngeom += 1;
mjvGeom *geom = scn->geoms + scn->ngeom - 1;
mjv_initGeom(geom, mjGEOM_SPHERE, NULL, NULL, NULL, rgba);
mjv_connector(geom, mjGEOM_LINE, width, from, to);
}
/*--------绘制箭头--------*/
void draw_arrow(mjvScene *scn, mjtNum *from, mjtNum *to, mjtNum width,
float rgba[4]) {
scn->ngeom += 1;
mjvGeom *geom = scn->geoms + scn->ngeom - 1;
mjv_initGeom(geom, mjGEOM_SPHERE, NULL, NULL, NULL, rgba);
mjv_connector(geom, mjGEOM_ARROW, width, from, to);
}
/*--------绘制几何体--------*/
void draw_geom(mjvScene *scn, int type, mjtNum *size, mjtNum *pos, mjtNum *mat,
float rgba[4]) {
scn->ngeom += 1;
mjvGeom *geom = scn->geoms + scn->ngeom - 1;
mjv_initGeom(geom, type, size, pos, mat, rgba);
}
// main function
int main(int argc, const char **argv) {
char error[1000] = "Could not load binary model";
m = mj_loadXML("../../../../API-MJCF/mecanum.xml", 0, error, 1000);
// make data
d = mj_makeData(m);
// init GLFW
if (!glfwInit()) {
mju_error("Could not initialize GLFW");
}
// create window, make OpenGL context current, request v-sync
GLFWwindow *window = glfwCreateWindow(1200, 900, "Demo", NULL, NULL);
glfwMakeContextCurrent(window);
glfwSwapInterval(1);
// initialize visualization data structures
mjv_defaultCamera(&cam);
mjv_defaultOption(&opt);
mjv_defaultScene(&scn);
mjr_defaultContext(&con);
// create scene and context
mjv_makeScene(m, &scn, 2000);
mjr_makeContext(m, &con, mjFONTSCALE_150); // 字体大小
// install GLFW mouse and keyboard callbacks
glfwSetKeyCallback(window, keyboard);
glfwSetCursorPosCallback(window, mouse_move);
glfwSetMouseButtonCallback(window, mouse_button);
glfwSetScrollCallback(window, scroll);
float cnt = 0;
// run main loop, target real-time simulation and 60 fps rendering
while (!glfwWindowShouldClose(window)) {
d->ctrl[0] = std::sin(cnt);
d->ctrl[1] = std::cos(cnt);
d->ctrl[2] = std::sin(cnt);
mj_step(m, d);
cnt += 0.001;
// get framebuffer viewport
mjrRect viewport = {0, 0, 0, 0};
glfwGetFramebufferSize(window, &viewport.width, &viewport.height);
// update scene and render
// 在这之后绘制
mjv_updateScene(m, d, &opt, NULL, &cam, mjCAT_ALL, &scn);
/*--------3D绘制--------*/
mjtNum from[3] = {0, 1, 1};
mjtNum to[3] = {0, 3, 4};
float color[4] = {0, 1, 0, 1};
draw_line(&scn, from, to, 20, color);
mjtNum to2[3] = {0, -1, 1};
float color2[4] = {0, 0, 1, 1};
draw_arrow(&scn, from, to2, 0.1, color2);
mjtNum size[3] = {0.1, 0, 0};
mjtNum pos[3] = {0, 0, 1.0};
mjtNum mat[9] = {1, 0, 0, 0, 1, 0, 0, 0, 1};//坐标系,空间向量
draw_geom(&scn, mjGEOM_SPHERE, size, pos, mat, color);
/*--------3D绘制--------*/
/*--------速度跟踪--------*/
auto lin_vel = get_sensor_data(m, d, "base_lin_vel");
auto base_pos = get_sensor_data(m, d, "base_pos");
for (int i = 0; i < 3; i++) {
from[i] = base_pos[i];
to[i] = base_pos[i] + lin_vel[i] * 5;
}
from[2] += 0.5;
to[2] += 0.5;
float color3[4] = {0.3, 0.6, 0.3, 0.9};
draw_arrow(&scn, from, to, 0.1, color3);
/*--------速度跟踪--------*/
// 在这之前把要绘制的绘制好
mjr_render(viewport, &scn, &con);
/*--------2D绘制--------*/
mjr_text(mjFONT_NORMAL, "Albusgive", &con, 0, 0.9, 1, 0, 1);
mjrRect viewport2 = {50, 100, 50, 50};
mjr_overlay(mjFONT_NORMAL, mjGRID_TOPLEFT, viewport, "github", "Albusgive",
&con);
mjr_rectangle(viewport2, 0.5, 0, 1, 0.6);
mjrRect viewport3 = {100, 200, 150, 50};
mjr_label(viewport3, mjFONT_NORMAL, "Albusgive", 0, 1, 1, 1, 0, 0, 0, &con);
/*--------2D绘制--------*/
// swap OpenGL buffers (blocking call due to v-sync)
glfwSwapBuffers(window);
// process pending GUI events, call GLFW callbacks
glfwPollEvents();
}
// free visualization storage
mjv_freeScene(&scn);
mjr_freeContext(&con);
// free MuJoCo model and data
mj_deleteData(d);
mj_deleteModel(m);
// terminate GLFW (crashes with Linux NVidia drivers)
#if defined(__APPLE__) || defined(_WIN32)
glfwTerminate();
#endif
return 1;
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.20)
project(MUJOCO_T)
include_directories(${CMAKE_CURRENT_SOURCE_DIR}/simulate)
#编译安装,从cmake安装位置opt使用
# 设置 MuJoCo 的路径
set(MUJOCO_PATH "/home/nzb/programs/mujoco-3.3.0")
# 包含 MuJoCo 的头文件
include_directories(${MUJOCO_PATH}/include)
# 设置 MuJoCo 的库路径
link_directories(${MUJOCO_PATH}/bin)
set(MUJOCO_LIB ${MUJOCO_PATH}/lib/libmujoco.so)
find_package(OpenCV REQUIRED)
add_executable(draw draw.cpp)
#从cmake安装位置opt使用
target_link_libraries(draw ${MUJOCO_LIB} glut GL GLU glfw ${OpenCV_LIBS})