datetime:2023/10/26 10:23
author:nzb
该项目来源于大佬的动手学ROS2
2.做个时钟-系统时间同步
在机器人系统中,时间同步非常重要。
原因在于,硬件系统采集的数据都是随时间变换而变化的,如果当前的控制使用上一时刻的传感器数据判断,就会造成各种问题,比如机器人上一时刻检测到前方有障碍,下一时刻障碍消失了,但此时如果采用过期的数据,就会造成误判。
MicroROS在设计时为我们提供了一系列的API用于时间同步和时间获取,本节我们就通过MicroROS进行时间同步,并最终在OLED上实现一个时钟功能。
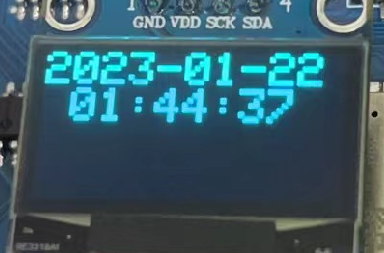
最终效果如下:

一、新建工程并添加依赖
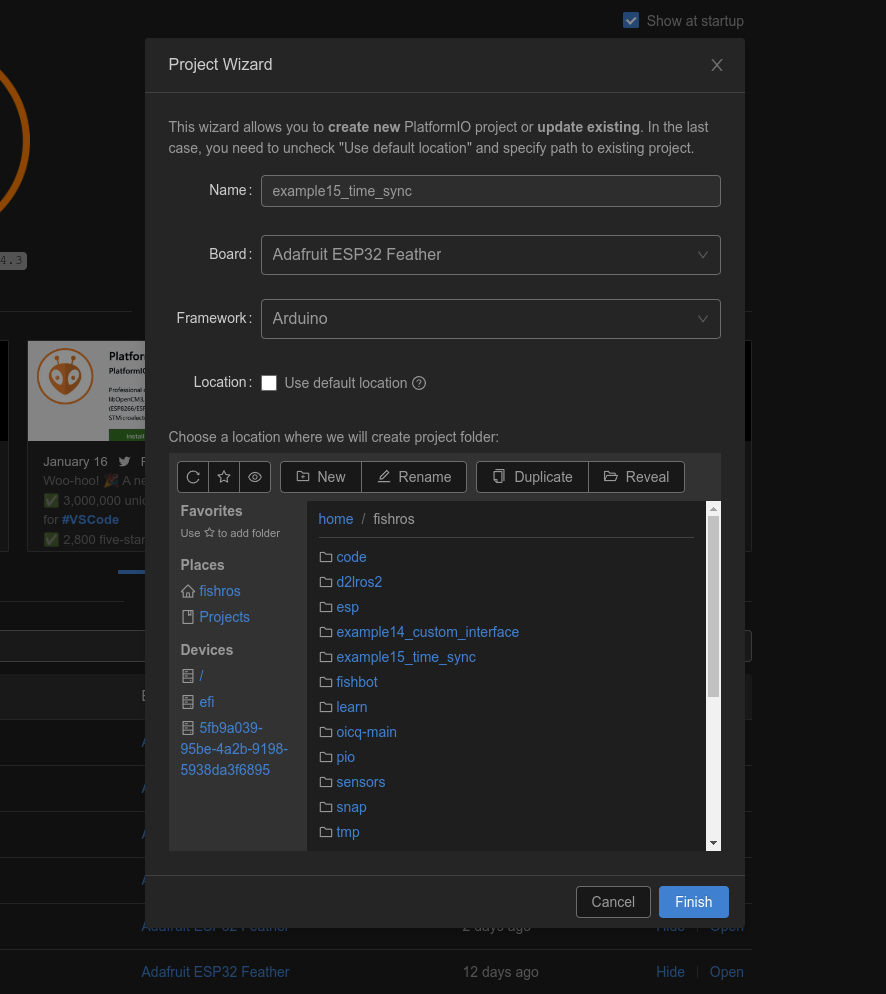
1.1 新建工程
新建example15_time_sync工程
1.2 添加依赖
这里需要使用三个库,microros、oled驱动以及时间库Time
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
lib_deps =
https://gitee.com/ohhuo/micro_ros_platformio.git
adafruit/Adafruit SSD1306@^2.5.7
paulstoffregen/Time@^1.6.1
二、编写代码
代码并不多,单个文件,将相应注释已经加上。
#include <Arduino.h>
#include <micro_ros_platformio.h>
#include <rcl/rcl.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <TimeLib.h> // 加载时间库,提供setTime\year\month...函数
#include <Adafruit_GFX.h> // 加载Adafruit_GFX库
#include <Adafruit_SSD1306.h> // 加载Adafruit_SSD1306库
Adafruit_SSD1306 display; // 声明对象
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
const int timeout_ms = 1000;
static int64_t time_ms;
static time_t time_seconds;
char time_str[25];
void setup()
{
Serial.begin(115200);
// 设置通过串口进行MicroROS通信
set_microros_serial_transports(Serial);
// 延时时一段时间,等待设置完成
delay(2000);
// 初始化内存分配器
allocator = rcl_get_default_allocator();
// 创建初始化选项
rclc_support_init(&support, 0, NULL, &allocator);
// 创建节点 example15_time_sync
rclc_node_init_default(&node, "example15_time_sync", "", &support);
// 创建执行器
rclc_executor_init(&executor, &support.context, 1, &allocator);
Wire.begin(18, 19);
display = Adafruit_SSD1306(128, 64, &Wire);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C); // 设置OLED的I2C地址,默认0x3C
display.setTextSize(2); // 设置字体大小,最小为1
display.clearDisplay(); // 清空屏幕
display.setCursor(0, 0); // 设置开始显示文字的坐标
display.setTextColor(SSD1306_WHITE); // 设置字体颜色
display.println("hello oled!"); // 输出的字符
}
void loop()
{
/*=========================同步时间=====================================*/
while (!rmw_uros_epoch_synchronized()) // 判断时间是否同步
{
rmw_uros_sync_session(timeout_ms); // 同步时间
if (rmw_uros_epoch_synchronized())
{
time_ms = rmw_uros_epoch_millis(); // 获取当前时间
time_seconds = time_ms / 1000;
setTime(time_seconds + 8 * 3600); // 将当前时间+8H到北京时间然后设置到系统
}
delay(10);
return;
}
/*========================获取时间与显示==================================*/
sprintf(time_str, "%04d-%02d-%02d %02d:%02d:%02d ", year(), month(), day(), hour(), minute(), second());
display.clearDisplay(); // 清空屏幕
display.setCursor(00, 0); // 设置开始显示文字的坐标
display.println(time_str); // 输出的字符
display.display();
delay(100);
}
三、代码注解&API介绍
核心的时间同步代码就三行
rmw_uros_epoch_synchronized判断microros是否已经同步时间rmw_uros_sync_session 同步时间rmw_uros_epoch_millis 获取当前时间
四、下载测试
4.1 编译下载
4.2 启动Agent
接着打开终端启动agent
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO serial --dev /dev/ttyUSB0 -v
点击下RST按钮,重启开发板,正常可以看到下图内容

4.3 查看是否连通
ros2 node list

4.4 查看时间
五、总结
本节我们通过三个API完成了MicroROS时间同步功能的开发,最终并将当前时间在OLED上显示出来,但使用有线的方式过于麻烦,下一节我们尝试通过无线WIFI完成时间的同步与MicroROS的通信开发。