datetime:2025/09/17 12:00
author:nzb
机器人基础知识学习笔记---通信篇
1.引言
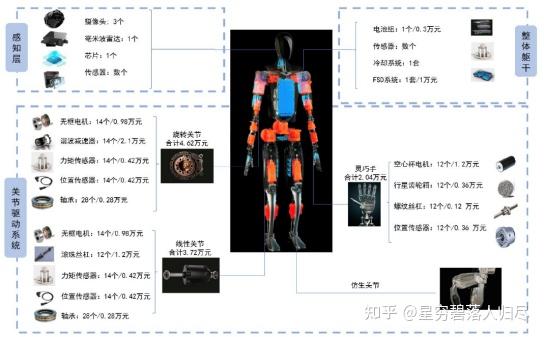
在现代机器人技术中,机器人运动以及功能实现离不开其基础硬件系统。 如图所示,机器人硬件系统的基本组成包括相机、芯片、传感器等构成的感知层;各类电机、传感器、轴承等组成的关节驱动系统;以及电池组、传感器、冷却系统和FSD系统构成的整体躯干层。
在机器人技术的蓬勃发展浪潮中,通信模块作为机器人身体组件之间的“神经系统”,扮演着至关重要的角色。它是连接机器人各个硬件部件的关键纽带,负责将传感器收集到的环境数据高效地传输至控制器,并将控制器生成的动作指令精准地传达给执行机构,确保机器人各部分协同工作。无论是工业机器人在复杂生产流程中多部件的同步协作,还是服务机器人在动态环境中与人类和其他设备的交互,亦或是医疗机器人在手术过程中各组件的精准配合,通信模块的性能直接影响机器人系统的响应速度、数据传输的稳定性和整体运行的流畅性。本文将深入探讨机器人通信模块的多种技术架构、数据传输协议、应用场景以及未来的发展方向。
2.通信方式的分类
2.1 有线通信
2.1.1 PROFIBUS/PROFINET通信
作为德国工业4.0的核心通信标准,PROFIBUS诞生于1989年,采用主从令牌环架构,支持RT(实时)和IRT(等时实时)两种模式,IRT模式时钟抖动<1μs,最高速率12Mbps,支持127节点组网支持星型、环型和混合拓扑,最大网络直径达200公里。其升级版PROFINET基于以太网实现。在汽车制造车间中,通过PROFINET IRT实现200台焊接机器人毫秒级同步,定位精度达±0.05mm。
2.1.2 CAN总线通信
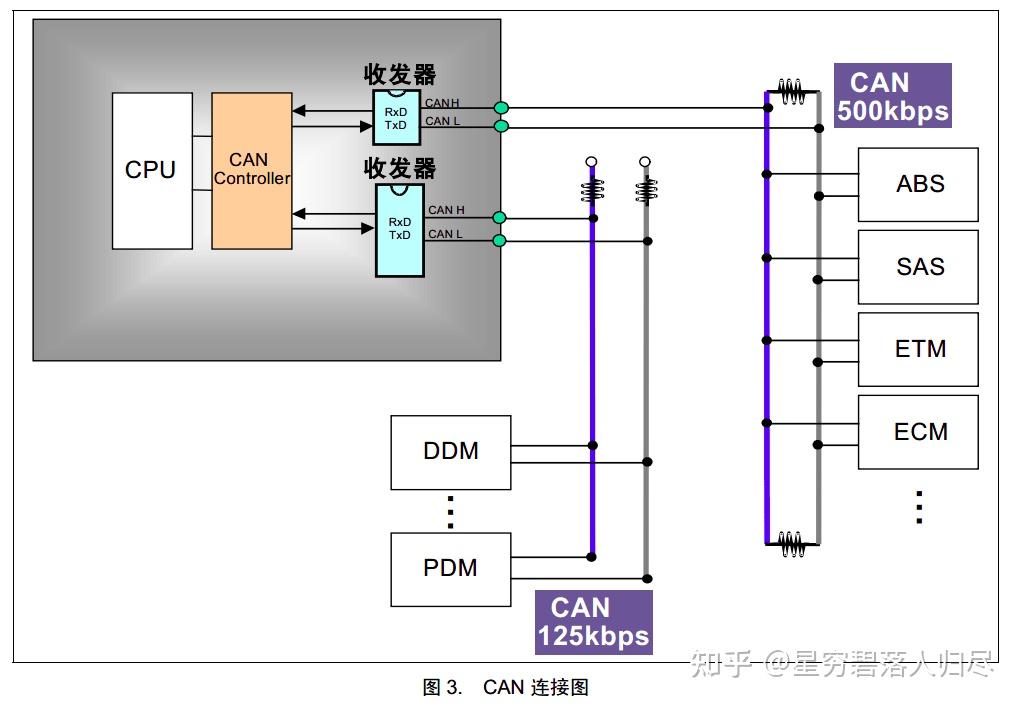
CAN总线(Controller Area Network)是一种用于实时数据传输的串行通信协议,广泛应用于汽车电子、工业自动化、航空航天等领域。由博世公司于1986年研发,具有实时性好,高可靠性、抗干扰能力强、支持多节点分布式控制等特点,其物理层采用差分信号传输,内置CRC校验、帧格式校验和应答校验三重保障,误码率 < ,已成为工业控制领域的经典解决方案。在机器人领域,CAN总线也得到了广泛的应用,例如在Boston Dynamics Atlas人形机器人中,通过CAN FD协议实现28个关节的500μs同步控制周期。CAN总线还衍生和发展了许多协议类型,比如基于CAN总线的CANopen协议。
2.1.3 板级数字总线通信
I2C总线:(Inter-Integrated Circuit)通信是一种广泛使用的串行通信协议,主要用于连接低速设备,如传感器、EEPROM、RTC(实时时钟)等。它具有简单、成本低、占用引脚少等优点,因此在嵌入式系统和物联网设备中非常常见。
SPI总线:SPI(Serial Peripheral Interface,串行外设接口)是一种高速、同步、全双工的串行通信协议,主要用于微控制器(MCU)与外部设备之间的通信。SPI总线采用主从模式,即一个主设备(Master)和一个或多个从设备(Slave )。
2.1.4 异步串行通信
UART通信:UART(Universal Asynchronous Receiver/Transmitter,通用异步收发传输器)是一种常见的串行通信协议,用于设备之间的数据传输。它允许设备以异步方式发送和接收数据,即发送方和接收方不需要共享时钟信号。其特点如下:
- 异步通信:发送方和接收方不需要共享时钟信号,数据传输通过起始位和停止位来同步。
- 全双工:UART支持全双工通信,即发送方和接收方可以同时发送和接收数据。
- 简单高效:硬件接口简单,适用于低速、短距离通信。
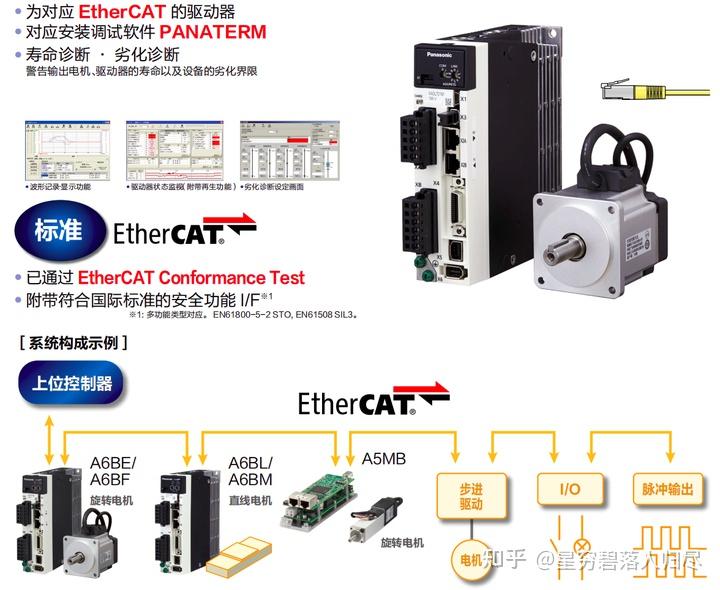
2.1.5 EtherCAT通信
EtherCAT(Ethernet for Control Automation Technology)是一种高性能的实时以太网通信协议,广泛应用于工业自动化领域。它由德国Beckhoff Automation公司在2003年开发,并于2007年成为国际标准(IEC 61158和IEC 61784)。其具有高实时性、高带宽的特点。在特斯拉Optimus中,通过EtherCAT G(千兆级)传输4K双目视觉数据,带宽利用率达97%。
2.1.6 单线对以太网通信(SPE)
单对以太网(Single Pair Ethernet,SPE)是一种新兴的以太网技术,通过仅使用一对双绞线实现数据传输,同时支持数据线供电(PoDL)。它旨在满足工业物联网(IIoT)和工业自动化中对高效、低成本和小型化网络的需求。该通信方式简化了布线,传统以太网需要两对或四对双绞线,而SPE仅需一对双绞线,显著减少了布线的复杂性和成本。SPE支持多种传输速率,从10 Mbps到1 Gbps,传输距离可达1000米。SPE通信基于IEEE 802.3标准,确保了不同厂商设备之间的互操作性。SPE相对于传统以太网通信进行了小型化与轻量化,其电缆和连接器尺寸更小,适合在空间受限的环境中使用。在实际应用中,SPE通信方式的布线使Honda E2-DR人形机器人减少1.2kg线缆重量。
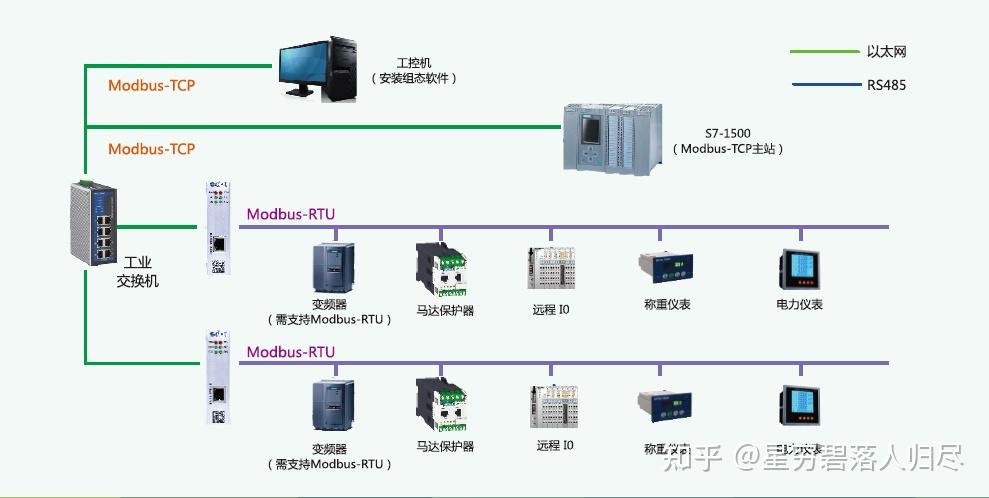
2.1.7 Modbus通信
Modbus 是一种广泛应用于工业自动化领域的通信协议,最初由 Modicon 公司(现为施耐德电气的一部分)于 1979 年开发,用于支持可编程逻辑控制器(PLC)之间的通信。它已成为工业电子设备间通信的重要标准,支持多种物理层接口,包括串行接口(如 RS-232、RS-485)和以太网接口。Modbus 协议有多个变种,常见的包括:
- Modbus RTU:使用串行通信(如 RS-485 或 RS-232),数据以二进制形式传输,适用于长距离和噪声环境。
- Modbus ASCII:使用文本编码,便于调试和监控,但效率较低。
- Modbus TCP/IP:基于以太网的实现,支持 TCP/IP 网络,适用于分布式系统。
- Modbus UDP:基于 UDP 的实现,适用于对速度要求较高的场景。
- Modbus RTU over TCP:将 Modbus RTU 帧封装在 TCP/IP 报文中,结合了 RTU 的高效性和 TCP/IP 的网络功能。
2.1.8 RS-232/RS-485通信
RS-232 和 RS-485 是两种常见的串行通信标准,广泛应用于工业自动化、嵌入式系统和计算机通信等领域。它们都基于串行通信,但具有不同的电气特性和应用场景。RS-232 是一种单点通信标准,通常用于点对点通信,如计算机与调制解调器(Modem)之间,RS-232通信距离较短,仅适用于短距离通信,不适合高速数据传输,易受电磁干扰。RS-485支持多点通信,可以连接多个设备(最多可达 32 个),适合长距离通信,其通信距离可达1200米左右,且支持较高的数据传输速率,并且能够有效抵抗电磁干扰,但其硬件复杂且布线要求高。
2.1.9 USB Type-C扩展通信
USB Type-C 是一种新型的通用串行总线(USB)接口标准,广泛应用于现代电子设备中。它不仅支持高速数据传输,还支持多种功能,如电力传输、视频输出和音频传输。其支持多种USB协议,包括USB 2.0、USB 3.2、USB 4.0。
2.2 无线通信
2.2.1. WiFi通信
WiFi(Wireless Fidelity)是一种无线局域网(WLAN)通信标准,基于IEEE 802.11标准。它允许设备(如手机、笔记本电脑、平板电脑等)通过无线信号连接到网络,而无需使用物理电缆。WiFi设备工作是通过无线接入点(AP)或路由器发送和接收无线信号。无线信号在空气中传播,设备通过天线接收这些信号并解码为数据。其具有高带宽、支持中远距离通信的特点,但可能受延迟影响。
2.2.2. LPWAN通信(低功耗广域网)
LPWAN(Low-Power Wide-Area Network,低功耗广域网)是一种专为物联网(IoT)和机器对机器(M2M)应用设计的无线通信技术,旨在实现低功耗、长距离和低成本的通信。其网络架构由节点(物联网设备)、网关和云服务器组成,当节点通过无线信号与网关通信时网关将数据传输到云服务器。该通信方式采用多种协议,如LoRa、Sigfox、NB-IoT等,这些协议通过不同的频段、调制方式和编码方式实现低功耗和长距离通信。LPWAN的核心优势是μA级休眠电流,单电池可持续工作5-10年,能够支持百万级设备连接。
2.2.3. 短距通信技术
蓝牙/BLE:蓝牙(Bluetooth)是一种短距离无线通信技术,主要用于连接设备(如手机、耳机、平板电脑、笔记本电脑、智能手表等),以实现数据传输和通信。蓝牙通信基于一种主从架构,其中一个设备(主设备)可以与多个从设备通信。其具有低功耗、短距离、设备直连的特点,典型应用有可穿戴设备实现肌电传感器数据实时同步,以及NFC辅助配对机器人外设。
Zigbee/Thread:Zigbee 和 Thread 都是基于 IEEE 802.15.4 标准的低功耗无线通信协议,广泛应用于物联网(IoT)和智能家居设备。尽管它们共享相同的物理层(PHY)和媒体访问控制层(MAC),但在上层协议和应用场景上存在显著差异。Zigbee定义了完整的应用层,保证了较强的应用层互操作性,Thread 是一种基于 IPv6 的低功耗无线通信协议,支持IPv6无缝接入互联网。
2.2.4. 射频模块通信
射频模块通信(RF Module Communication):射频模块(RF Module)是一种小型电子设备,用于在两个设备之间无线传输和接收射频信号。它广泛应用于各种无线通信场景,包括智能家居、工业自动化、远程控制等。射频模块通常集成了射频前端电路、调制解调器、天线接口等功能,能够在不同频段实现无线通信。射频模块主要有以下几种类型:
- 发射模块(Transmitter Module):将数据转换为射频信号并发送;
- 接收模块(Receiver Module):接收射频信号并将其转换回数据;
- 收发模块(Transceiver Module):集成了发射和接收功能,支持双向通信。
射频模块的工作基于电磁波的传输原理,通信主要原理是调制,传输,接收以及解调。该方式无需物理连接,可在一定距离内传输数据,根据频率和功率,射频模块可以覆盖较远距离,适用于大面积监控。射频模块可应用在工业机器人遥控指令传输,能够做到毫秒级响应;在电磁敏感环境中,可以支持核电站巡检机器人的冗余通信。
2.2.5. 蜂窝网络(5G/4G)
5G是第五代无线网络技术,旨在提供比4G更高的数据传输速度、更低的延迟,并支持更多设备和服务。5G技术的核心优势包括超高速、低延迟和大规模机器类型通信,能够满足从个人娱乐到工业自动化等多样化的需求。5G技术支持三大主要应用场景:
- 增强型移动宽带:适用于需要高带宽的服务,如4K/8K超高清视频、虚拟现实(VR)和增强现实(AR)。
- 超可靠低延迟通信:适用于对延迟要求极高的应用,如自动驾驶汽车、远程医疗手术和工业自动化。
- 大规模机器类型通信:适用于大量设备的连接,如智能城市、智能农业和工业物联网。
2.2.6. 软件层通信
ROS中间件通信
ROS (Robot Operating System)是一种面向机器人系统的分布式通信框架,提供了多种通信方式以满足不同的应用场景。ROS适用于分布式系统,支持零拷贝数据传输,可明显降低CPU负载,以下为ROS定义的几种通信方式:
- 话题(Topics):基于发布-订阅模式,节点可以发布消息到一个话题,其他节点可以订阅该话题以接收消息。这种方式适用于需要频繁更新的数据(如传感器数据);
- 服务(Services):基于请求-响应模式,客户端节点发送请求到服务节点,并等待响应。这种方式适用于需要明确应答的操作;
- 动作(Actions):结合了请求-响应和发布-订阅模式,适用于需要长时间执行的任务,支持反馈和取消功能;
- 参数(Parameters):用于配置节点行为,支持动态更新和复杂的参数结构。
与 ROS1 相比,ROS2 在多个方面进行了改进:
- 通信机制:ROS1基于TCP/UDP,而ROS2基于DDS,提供了更高效、更可靠的通信;
- 系统架构:ROS1依赖中心节点,ROS2采用去中心化架构,增强了系统的健壮性;
- 实时性:ROS2优化了实时控制能力,适合高实时性需求的场景;
- 安全性:ROS 2提供了更完善的安全特性,如通信加密和身份认证。
DDS协议栈通信
DDS(Data Distribution Service)通信是一种高性能的分布式数据交换中间件,广泛应用于实时系统中,如航空航天、工业自动化和自动驾驶等领域。它基于发布-订阅模型,允许设备或应用程序作为发布者发布数据,而其他设备或应用程序作为订阅者接收这些数据。DDS的核心通信模式基于发布者-订阅者模型,数据发布者将数据发送到全局数据空间,订阅者从该空间接收数据。其数据话题定义了数据的类型和结构,是数据交换的“频道”。DDS采用完全去中心化的架构,系统组件之间可以自动发现并建立通信,提高了系统的灵活性和可扩展性。DDS具有高可靠性、支持复杂数据流的特点,能够在毫秒级别提供快速的数据传输,适用场景于自动驾驶中多传感器融合方案需要时钟严格同步的情况。
3.技术选型与场景适配
在当今快速发展的科技时代,通信技术已成为推动机器人技术进步的关键因素之一。不同的通信方式在实时性、功耗、部署成本和数据安全等方面各有优劣,而合理的技术选型和适配是实现高效、可靠机器人通信系统的基础。
实时性:从硬实时到非实时
实时性是通信系统的重要性能指标,尤其在机器人控制和自动化系统中。根据实时性要求的不同,通信协议可以分为硬实时、软实时和非实时三类。
硬实时(Hard Real-Time):硬实时系统要求在严格的时间约束内完成任务,延迟必须控制在极低水平。例如,EtherCAT 是一种广泛应用于工业自动化领域的硬实时协议,它能够实现微秒级的同步精度,适用于需要高精度控制的场景,如机器人的关节驱动和平衡控制。
软实时(Soft Real-Time):软实时系统虽然也有时间约束,但允许一定程度的延迟。DDS(数据分发服务)是一种典型的软实时协议,它在航空航天、军事和智能交通等领域有广泛应用。DDS能够根据数据的重要性和优先级动态调整传输策略,适用于对实时性有一定要求但不需要极端精确的场景。
非实时(Non-Real-Time):非实时系统对时间要求较低,延迟较高。WiFi是最常见的非实时通信技术,广泛应用于日常的互联网接入和智能家居设备。虽然延迟较高,但其灵活性和易用性使其成为许多应用场景的首选。
功耗:从低功耗到高功耗
功耗是通信系统设计中不可忽视的因素,尤其在移动设备和物联网应用中。不同的通信技术在功耗方面存在显著差异。
BLE(蓝牙低能耗):BLE以其极低的功耗(nJ/bit)著称,是低功耗设备的理想选择。它广泛应用于可穿戴设备、医疗设备和智能家居传感器,能够在极低的功耗下实现稳定的通信。
Zigbee:Zigbee是一种低功耗、低速率的无线通信协议,适用于物联网中的传感器网络。它通过优化网络拓扑和数据传输策略,实现了较低的功耗和较长的电池寿命。
LoRa:LoRa是一种长距离无线通信技术,具有低功耗和高覆盖范围的特点。它适用于需要长距离传输且对数据传输速率要求不高的场景,如智能农业和环境监测。
5G:5G技术虽然提供了高速率和低延迟的通信能力,但其功耗相对较高(mJ/bit)。5G适用于对性能要求极高的场景,如工业自动化、自动驾驶和高清视频传输。
部署:从私有射频到工业以太网
部署成本是通信系统选型的重要考量因素之一。不同的通信技术在部署成本上存在显著差异。
私有射频:私有射频系统通常成本最低,适合小范围或特定用途的部署。它们不需要复杂的基础设施,部署简单快捷。
WiFi:WiFi的部署成本适中,广泛应用于家庭、办公和公共场所。其设备成本低,易于安装和配置,但覆盖范围有限。
蜂窝网络:蜂窝网络(如4G和5G)的部署成本较高,需要大量的基站和复杂的网络架构。然而,蜂窝网络覆盖范围广,能够提供高速率和低延迟的通信服务。
工业以太网:工业以太网的部署成本最高,但其可靠性和抗干扰能力使其成为工业环境中的首选。它能够支持高速数据传输和高精度控制,适用于对可靠性要求极高的场景。
数据安全:从基础加密到高级加密
数据安全是通信系统的重要保障,尤其是在涉及隐私和敏感信息的场景中。不同的通信技术在数据安全方面提供了不同程度的保护。
Zigbee:Zigbee采用 AES-128加密,提供了基本的安全保护。它适用于对安全性要求不高的物联网设备。
WiFi:WiFi的 WPA3加密标准提供了更强的安全性,能够有效防止数据泄露和未授权访问。它适用于需要保护隐私的场景,如家庭和办公网络。
5G:5G的 KMS(密钥管理系统)加密提供了最高级别的安全保护。它能够动态管理密钥,确保数据传输的安全性和完整性,适用于对数据安全要求极高的场景,如金融和医疗领域。
多协议异构组网:构建高可靠机器人通信系统
在实际应用中,单一的通信技术往往难以满足复杂场景下的所有需求。通过多协议异构组网,可以结合多种通信技术的优势,构建出高可靠性和高性能的机器人通信系统。例如,将 5G、BLE 和 EtherCAT结合使用,可以实现以下优势:
5G提供高速率和低延迟的通信能力,适用于远程数据处理和 AI 模型更新。
BLE提供低功耗的通信能力,适用于移动设备和传感器网络。
EtherCAT提供高精度的实时控制能力,适用于机器人的关节驱动和平衡控制。
这种多协议异构组网方式能够充分发挥各协议的优势,满足机器人在不同场景下的通信需求。
3.1 机器人的混合通信架构
机器人通常需要处理多种复杂任务,因此通常采用混合通信架构,结合高速总线、实时协议和无线技术,以满足不同场景下的通信需求。以下是典型的通信架构设计:
- 实时控制:使用 CAN、EtherCAT 或 TSN协议进行关节驱动和平衡控制。这些协议能够提供低延迟和高精度的实时控制能力,确保机器人的稳定性和灵活性。
- 传感器网络:利用 I2C/SPI用于板载传感器,Zigbee 用于分布式环境监测。I2C/SPI适用于近距离、低功耗的传感器通信,而 Zigbee则适用于长距离、低功耗的传感器网络。
- 人机交互:通过 Wi-Fi/蓝牙传输语音指令或视频流。Wi-Fi和蓝牙技术能够实现快速的数据传输,适用于人机交互场景。
- 云端协作:借助 5G/Wi-Fi支持远程数据处理与 AI 模型更新。5G和 Wi-Fi能够提供高速率和低延迟的通信能力,确保机器人能够实时获取最新的数据和模型。
3.2 设计考量
在设计机器人通信系统时,需要综合考虑以下因素:
- 实时性:控制环路需低延迟,如 EtherCAT。对于需要高精度控制的场景,实时性是关键。
- 可靠性:抗干扰能力,如 CAN/RS-485。在工业环境中,抗干扰能力是确保系统稳定运行的重要因素。
- 带宽:视觉数据需高吞吐量,如 以太网/光纤。对于需要传输大量数据的场景,如视觉处理和 AI 模型更新,高带宽是必不可少的。
- 功耗:移动设备倾向低功耗协议,如 BLE/Zigbee。在移动设备和物联网应用中,低功耗是延长设备使用寿命的关键。
- 扩展性:模块化设计需支持多节点,如 ROS/DDS。模块化设计能够提高系统的可扩展性和灵活性,适应不同规模的应用场景。
通过对比不同通信技术的实时性、功耗、部署成本和数据安全等关键指标,我们可以更好地进行技术选型和适配。在实际应用中,采用多协议异构组网和混合通信架构能够充分发挥各技术的优势,构建出高效、可靠的机器人通信系统。
4.CAN通信
4.1 CAN通信技术介绍
CAN(Controller Area Network,控制器局域网)是一种串行通信协议,主要用于汽车电子系统、工业自动化设备以及其他嵌入式设备之间的数据交换。它以其高可靠性、多主通信能力和灵活的网络拓扑结构而被广泛应用。随着技术的发展,CAN的变种CAN FD(CAN with Flexible Data-rate)进一步提升了数据传输速率,最高可达8Mbps,传统CAN协议最高支持1Mbps的数据速率,CAN FD协议支持更高的速率,最高可达8Mbps,CAN的波特率范围通常为10Kbps到1Mbps,具体速率可根据应用场景调整。CAN网络长度和设备数量受限于总线电容,高速CAN(如1Mbps)的总线长度较短,而低速CAN(如40kbps)的总线长度可达1000米。CAN通信使用的电源电压一般有3.3V和5V, 而汽车应用中,CAN芯片支持12V和24V系统,耐压范围从42V到58V或更高。CAN通信的工作模式有三种:支持设备之间正常通信的模式,用于测试和调试的回环模式,适用于低功耗应用的待机模式和睡眠模式。CAN协议包括错误检测、错误通知和错误恢复功能,确保数据通信的可靠性,部分CAN芯片具备抗单粒子软错误设计,适用于电磁环境恶劣的场景。
CAN通信的应用场景十分广泛,常用的有应用于汽车控制系统中发动机控制、车辆安全、信息娱乐等模块。电动车的ECU(电子控制单元)可以通过CAN协议实现快速而可靠的内部通信,协调车辆的多种功能;在工业自动化生产中,用于机器人控制、自动化生产线、传感器网络等场景的CAN通信技术可实现实时数据交换和远程控制,以及对设备状态的实时监控和故障预测。CAN协议在家庭自动化控制中,承担高速、实时、安全的控制命令传输任务,在智能家居中,各类智能设备通过CAN通信连接,实现统一管理和控制。
4.2 CAN通信原理
4.2.1. CAN通信的基本特点
- 多主模式:网络中的每个节点都可以主动发送数据。
- 非破坏性仲裁:通过标识符(ID)进行总线仲裁,优先级高的消息可以抢占总线。
- 差分信号传输:使用CAN_H和CAN_L两条信号线,抗干扰能力强。
- 错误检测与处理:具备强大的错误检测机制,包括CRC校验、位填充等。
4.2.2. CAN帧结构
CAN协议定义了多种类型的帧,其中最常用的是数据帧。以下是数据帧的结构:
| 字段名称 | 长度(位) | 描述 |
|---|---|---|
| 起始位 | 1 | 标识帧的开始 |
| 标识符(ID) | 11或29 | 唯一标识消息,决定优先级 |
| 控制位 | 6 | 包含数据长度码(DLC) |
| 数据段 | 0-64 | 实际传输的数据,最多8字节 |
| CRC校验段 | 15 | 用于检测传输错误 |
| 应答段 | 2 | 接收节点确认接收到正确的数据 |
| 结束位 | 7 | 标识帧的结束 |
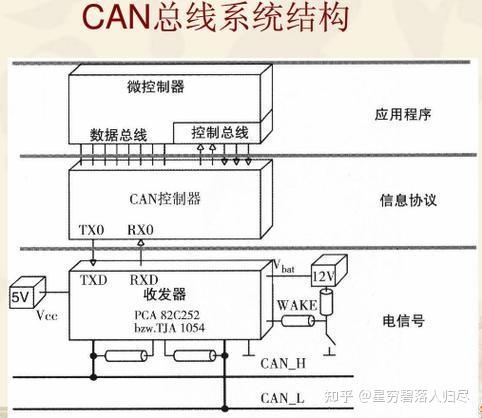
4.2.3. CAN通信的物理层
CAN采用差分信号传输,使用两根信号线:
- CAN_H(高电平线)
- CAN_L(低电平线)
信号电平分为两种状态:
- 显性电平(Dominant):表示逻辑“0”,此时CAN_H > CAN_L。
- 隐性电平(Recessive):表示逻辑“1”,此时CAN_H ≈ CAN_L。
差分电压计算公式为:
当 时,判定为显性电平;当 时,判定为隐性电平。
4.2.4. CAN通信的仲裁机制
CAN总线上的多个节点可能同时尝试发送数据,这时需要通过仲裁机制决定哪个节点获得总线使用权。仲裁基于标识符(ID),ID值越小,优先级越高。
仲裁规则:
- 显性电平(逻辑“0”)优先于隐性电平(逻辑“1”)。
- 发送节点在仲裁段逐位比较自己的ID与总线上的信号。如果发现总线上的信号与自己发送的信号不同,则停止发送,退出仲裁。
例如,两个节点分别发送以下ID:
- 节点A:00001000(优先级高)
- 节点B:00001010(优先级低)
仲裁过程:
- 两位都发送 000010,没有冲突。
- 第7位,节点A发送 0,节点B发送 1。由于显性电平优先,节点A获胜,继续发送;节点B退出。
4.2.5. 位填充机制
为了确保信号的同步性,CAN协议采用了位填充技术:
每连续5个相同电平后,插入一个相反电平。
接收端会自动移除填充位。
例如,原始数据为:00000111110
经过位填充后变为:0000010111110
4.2.6. CAN波特率计算
CAN通信的波特率由以下公式决定:
其中,是每位的时间长度,由以下部分组成:
:同步段,固定为1个时间单元(Time Quantum, TQ)。
:传播段,用于补偿信号传播延迟。
和 :相位缓冲段,用于调整采样点位置。
采样点的位置通常设置在位时间的70%-90%之间,以确保数据的正确采样。
4.2.7. CAN的错误处理
CAN协议具有强大的错误检测和处理能力,主要包括以下几种错误类型:
- 位错误:发送节点检测到发送的位与总线上的位不一致。
- 填充错误:违反位填充规则。
- CRC错误:接收节点检测到CRC校验失败。
- 应答错误:发送节点未收到接收节点的应答信号。
- 格式错误:帧格式不符合规范。
每个节点维护两个错误计数器:
- 发送错误计数器(TEC)
- 接收错误计数器(REC)
当错误计数器超过一定阈值时,节点进入错误被动状态或离线状态。
4.2.8.总结
CAN通信通过差分信号、仲裁机制、位填充和错误检测等技术,实现了高效可靠的通信。其核心公式包括差分电压计算和波特率计算:
4.3 CAN FD 与 CAN 的主要区别
CAN FD(Controller Area Network Flexible Data-rate)是 CAN(Controller Area Network)协议的扩展版本,旨在解决传统 CAN 协议在数据传输速率和灵活性方面的局限性。以下是 CAN FD 与 CAN 的主要区别:
| 对比 | CAN | CAN FD |
|---|---|---|
| 传输速率 | 最高传输速率为1 Mbps;适用于低速率传感器数据采集和简单控制指令传输 | 支持两种位速率: 1、仲裁阶段最高1 Mbps,数据阶段最高可达8 Mbps 2、在数据阶段可实现更高的传输速率,适合处理大量数据 |
| 数据域长度 | 数据帧长度最大为8字节,适用于简单数据和控制指令的传输 | 数据帧长度最大可达64字节;支持更大的数据负载,适合传输大块数据或复杂数据结构 |
| 帧格式 | 包括标准帧(11位标识符)和扩展帧(29位标识符);帧结构简单,适合低速率和小数据量应用 | 在传统 CAN 基础上增加 FDF、BRS 和 ESI 字段;帧结构更复杂,提供更高灵活性和传输效率 |
| 兼容性 | 广泛应用于现有的汽车电子系统和工业控制系统 | 向后兼容传统 CAN,可与传统 CAN 设备共存;但传统 CAN 设备无法利用其高速特性 |
| 应用场景 | 适用于底盘和动力系统等对数据传输速率要求不高的场景 | 更适合高带宽场景,如 ADAS、车联网和工业自动化 |
| 错误检测 | 使用15位 CRC 校验,适用于低速率和小数据量传输 | 使用改进的 CRC 算法,支持更长数据帧,降低未检测到错误的风险 |
CAN FD 是对传统 CAN 协议的升级,通过支持更高的传输速率和更大的数据帧长度,显著提升了数据传输效率。同时,它保持了与传统 CAN 的兼容性,使得汽车制造商和工业用户可以逐步升级现有系统,而无需完全替换硬件设施。
5.Ethcat通信
5.1 EtherCAT 简介
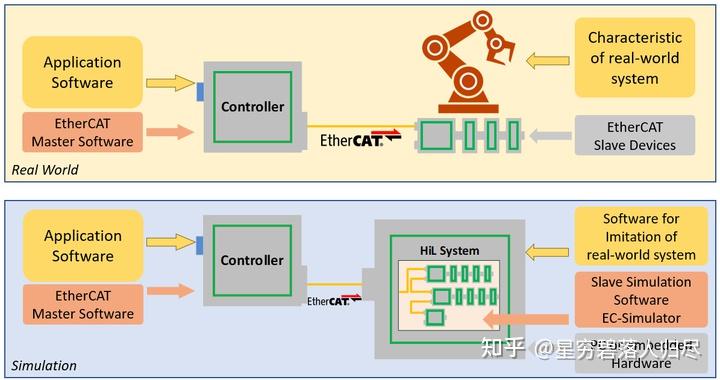
EtherCAT(Ethernet for Control Automation Technology)是一种基于以太网的实时通信协议,专为工业自动化领域设计。它以其卓越的实时性、高效率和灵活性而闻名,被誉为工业自动化领域的“超高速快递系统”。EtherCAT 于 2003 年由德国倍福(Beckhoff)公司提出,并于 2007 年成为国际标准(IEC 61158)。EtherCAT 同步精度小于1微秒,能够实现极高的实时性能,1000 个 I/O 的更新时间仅需 30 微秒,100 个伺服轴的通信可在每 100 微秒内完成,确保所有轴的实际位置和状态实时更新。EtherCAT 带宽利用率超过 90%,单个以太网帧最多可交换 1486 字节的过程数据。其数据帧在传输过程中即可被多个从站实时处理,采用“On the Fly”机制。EtherCAT支持线型、树型、星型和环型等多种拓扑结构,其结构灵活,易于扩展和维护。EtherCAT完全兼容以太网,支持 TCP/IP、UDP/IP 等标准协议,支持与其他协议(如 CAN、SERCOS)的无缝集成。EtherCAT 广泛应用于需要快速、精确控制的工业自动化场景,如工业机器人中用于控制机械臂的关节同步,实现数控机床的多轴联动的精密加工,高速串焊机的精准时序控制。
5.1.1 EtherCAT 的技术选型
- 主站设备:
主站通常由工业 PC 或 PLC 担当,需要支持 EtherCAT 协议栈。
主站硬件应具备高性能的以太网接口,如 Intel 网卡。
- 从站设备:
从站设备包括伺服驱动器、传感器、I/O 模块等。
从站控制器芯片(ESC)价格低廉,支持多种接口。
- 网络拓扑:
选择合适的网络拓扑结构,根据实际需求选择线型、树型或星型。
环型拓扑可用于提高网络的冗余性和可靠性。
- 协议支持:
确保主站和从站设备支持 EtherCAT 协议,包括 CoE(CANopen over EtherCAT)、SoE(SERCOS over EtherCAT)等。
5.2 EtherCAT通信原理简介
5.2.1 数据帧的传输
EtherCAT使用标准以太网帧(IEEE 802.3)进行数据传输。主站发送一个数据帧,该帧通过所有从站,并在每个从站中被实时处理。从站根据其地址提取或插入数据,然后将帧传递给下一个从站。
数据帧的结构如下:
| 字段名称 | 长度(字节) | 描述 |
|---|---|---|
| 前导码 | 7 | 用于同步 |
| 帧起始符 | 1 | 标识帧的开始 |
| 目标MAC地址 | 6 | 主站的MAC地址 |
| 源MAC地址 | 6 | 从站的MAC地址 |
| 类型/长度 | 2 | 数据长度或协议类型 |
| 数据段 | 可变 | 包含多个子报文 |
| 帧校验序列(FCS) | 4 | 用于检测传输错误 |
5.2.2 On-the-fly技术
EtherCAT的关键技术是“On-the-fly”,即数据帧在从站中被实时读取和写入,而无需存储整个帧。这种方式极大地减少了延迟。
从站处理数据的过程如下:
数据帧到达从站时,硬件电路提取与该从站相关的数据。
从站将自己的状态信息插入到数据帧中。
数据帧继续传递给下一个从站。
5.2.3 EtherCAT的拓扑结构
EtherCAT支持多种拓扑结构,包括:
- 线型:从站依次连接,形成一条链。
- 星型:从站通过交换机连接到主站。
- 环型:从站首尾相连,形成闭环。
- 树型:结合线型和星型的混合结构。
无论采用哪种拓扑结构,EtherCAT都只需一个数据帧即可完成所有从站的通信。
5.2.4 EtherCAT的同步机制
EtherCAT通过分布式时钟(Distributed Clocks, DC)实现高精度的时间同步。主站通过广播同步信号,确保所有从站的时钟保持一致。
分布式时钟的工作原理
主站发送一个包含时间戳的同步帧。
从站接收到同步帧后,调整本地时钟以匹配主站的时间。
同步误差通过以下公式计算:
其中:
- :同步误差。
- :主站的时间。
- :从站的本地时间。
同步精度:通过分布式时钟,EtherCAT可以实现纳秒级的时间同步,满足高精度运动控制的需求。
5.2.5 EtherCAT的性能指标
循环时间
EtherCAT的循环时间(Cycle Time)由以下公式决定:
其中:
- :循环时间。
- :数据帧的长度(比特数)。
- :以太网的传输速率(比特/秒)。
- :从站处理数据的时间。
例如,在100 Mbps的以太网中,传输1000字节的数据帧需要:
数据吞吐量
EtherCAT的有效数据吞吐量可以通过以下公式计算:
其中:
- :数据吞吐量(字节/秒)。
- :每次循环传输的数据量(字节)。
- :循环时间(秒)。
5.2.6 EtherCAT的错误检测与处理
EtherCAT具备强大的错误检测能力,主要包括以下机制:
- 帧校验序列(FCS):检测数据帧的传输错误。
- 看门狗机制:监控从站的状态,防止通信中断。
- 冗余机制:在环型拓扑中,支持数据帧的双路传输,提高可靠性。
当检测到错误时,主站会采取相应的措施,例如重新发送数据帧或隔离故障从站。
5.2.7 EtherCAT的应用场景
EtherCAT适用于各种高性能自动化场景,例如:
- 运动控制:多轴联动、机器人控制。
- 过程控制:实时监测和调节工业流程。
- 数据采集:高速传感器数据的采集与处理。
5.2.8总结
EtherCAT通过“On-the-fly”技术和分布式时钟实现了高效的实时通信。其核心公式包括循环时间和数据吞吐量的计算:
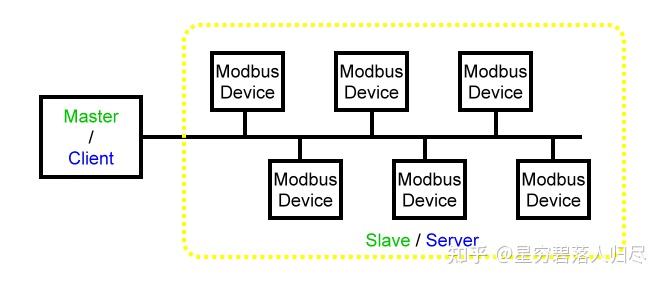
6.Modbus通信
6.1 Modbus 通信简介
Modbus 是一种广泛应用于工业环境的串行通信协议,最初由施耐德电气(Schneider Electric)于 1979 年开发,用于实现 PLC(可编程逻辑控制器)之间的通信。Modbus 协议简单、可靠且易于实现,经过多年的发展,已经成为工业自动化领域中最流行的通信协议之一。Modbus 协议支持多种物理介质,包括串行线(如 RS-232、RS-485)和以太网(Modbus TCP)。它主要用于工业环境中设备之间的数据交换,如传感器、控制器、执行器等。在工业自动化场景中用于 PLC、传感器、执行器等设备之间的数据交换,实现设备的远程监控和控制。
6.1.1 Modbus 协议的类型
- Modbus RTU(Remote Terminal Unit):
用于串行通信(如 RS-485),是最常见的 Modbus 版本。
采用二进制编码,数据传输效率高。
支持主从通信模式,一个主设备可以与多个从设备通信。
- Modbus ASCII:
也用于串行通信,但采用 ASCII 编码。
数据传输效率较低,但兼容性较好,适合调试和诊断。
- Modbus TCP:
基于以太网的 Modbus 协议,使用 TCP/IP 协议栈。
支持多主通信,适用于复杂的工业网络。
提供更高的数据传输速率和更远的通信距离。
6.1.2 Modbus 通信的协议结构
Modbus 协议的核心是其数据帧结构,以下是 Modbus RTU 数据帧的典型格式:
- 设备地址(1 字节):标识从设备的地址,范围为 0x01 到 0xFF。
- 功能码(1 字节):定义了主设备要执行的操作,如读取寄存器、写入寄存器等。
- 数据域(可变长度):包含实际的数据内容,如寄存器的值。
- 校验码(2 字节,CRC):用于检测数据传输中的错误。
Modbus 通信具有简单易用的特点,其通信协议简单,易于理解和实现,同时支持多种编程语言和开发平台。Modbus支持多种物理介质(RS-232、RS-485、以太网等)可与多种工业设备无缝集成。其还能够支持主从通信模式,确保通信的稳定性和安全性。但Modbus 通信亦有其不足之处, Modbus RTU的传输速率较低,不适合高带宽需求的应用,Modbus TCP 虽然支持高速传输,但需要复杂的网络基础设施。Modbus 协议本身缺乏加密和身份验证机制,在工业物联网环境中,需要额外的安全措施来保护数据。Modbus 协议主要用于简单的数据读写操作,缺乏复杂的功能支持,对于复杂的工业自动化任务,可能需要结合其他协议(如 EtherCAT、Profibus)。
6.2 Modbus通信原理简介
6.2.1 Modbus RTU通信帧结构
Modbus RTU的数据帧格式如下:
| 字段名称 | 长度(字节) | 描述 |
|---|---|---|
| 从站地址 | 1 | 标识目标从站(1-247) |
| 功能码 | 1 | 指定操作类型(如读寄存器、写寄存器) |
| 数据段 | 可变 | 包含请求或响应的具体数据 |
| CRC校验 | 2 | 循环冗余校验,用于检测传输错误 |
Modbus的功能码定义了主站请求的操作类型。常用的功能码包括:
- 0x01:读线圈状态(Read Coils)
- 0x02:读离散输入状态(Read Discrete Inputs)
- 0x03:读保持寄存器(Read Holding Registers)
- 0x04:读输入寄存器(Read Input Registers)
- 0x05:写单个线圈(Write Single Coil)
- 0x06:写单个寄存器(Write Single Register)
- 0x10:写多个寄存器(Write Multiple Registers)
6.2.2 Modbus RTU的CRC校验
Modbus RTU使用CRC-16校验算法检测数据帧的完整性。CRC校验值通过以下公式计算:
其中:
:数据帧中的第个字节。
:生成多项式,通常为 (十六进制表示为 0xA001)。
:数据帧的字节数。
计算步骤:
初始化CRC寄存器为 0xFFFF。
对每个字节进行异或运算,并依次移位。
根据生成多项式更新CRC寄存器。
最终得到的CRC值附加到数据帧末尾。
6.2.3 Modbus TCP通信帧结构
Modbus TCP基于以太网,其数据帧格式如下:
| 字段名称 | 长度(字节) | 描述 |
|---|---|---|
| 事务标识符 | 2 | 标识请求和响应的匹配 |
| 协议标识符 | 2 | 固定为 0x0000 |
| 长度 | 2 | 表示后续数据的长度 |
| 单元标识符 | 1 | 标识目标从站 |
| 功能码 | 1 | 指定操作类型 |
| 数据段 | 可变 | 包含请求或响应的具体数据 |
6.2.4 Modbus的地址映射
Modbus协议定义了四种主要的数据区域,每种区域的地址范围如下:
线圈(Coils):地址范围 0x0000 - 0xFFFF,读写,1位。
离散输入(Discrete Inputs):地址范围 0x0000 - 0xFFFF,只读,1位。
输入寄存器(Input Registers):地址范围 0x0000 - 0xFFFF,只读,16位。
保持寄存器(Holding Registers):地址范围 0x0000 - 0xFFFF,读写,16位。
实际应用中,地址通常以1开头,例如“40001”表示保持寄存器的第1个地址。
6.2.5 Modbus的性能指标
数据传输时间
在串行通信中,数据传输时间可以通过以下公式计算:
其中:
- :数据传输时间(秒)。
- :传输的总比特数(包括起始位、数据位、停止位和校验位)。
- :波特率(比特/秒)。
例如,在9600波特率下,传输10字节的数据(每个字节10比特)需要:
吞吐量
吞吐量可以通过以下公式计算:
其中:
- :数据吞吐量(字节/秒)。
- :每次循环传输的数据量(字节)。
- :通信周期(秒)。
6.2.6 Modbus的应用场景
Modbus广泛应用于以下领域:
工业自动化:PLC与传感器、执行器之间的通信。
能源管理:电力监控系统中的数据采集。
楼宇自动化:HVAC系统的控制与监测。
6.2.7 总结
Modbus通过简单的主从架构实现了高效可靠的通信。其核心公式包括CRC校验和传输时间的计算: