datetime:2023/09/13 09:36
author:nzb
该项目来源于大佬的动手学ROS2
4.使用RCLCPP编写节点
节点需要存在于功能包当中、功能包需要存在于工作空间当中。所以我们要想创建节点,就要先创建一个工作空间,再创建功能包。
1.创建工作空间和功能包
1.1 工作空间
工作空间就是文件夹,所以很简单。
cd d2lros2/chapt2/
mkdir -p chapt2_ws/src/
1.2 创建example_cpp功能包
创建example_cpp功能包,使用ament-cmake作为编译类型,并为其添加rclcpp依赖。
cd chapt2_ws/src
ros2 pkg create example_cpp --build-type ament_cmake --dependencies rclcpp
大家可以手写一下这个代码,感受一下。现在来讲一讲这条命令的含义和参数。
pkg create是创建包的意思--build-type用来指定该包的编译类型,一共有三个可选项ament_python、ament_cmake、cmake--dependencies指的是这个功能包的依赖,这里给了一个ros2的C++客户端接口rclcpp
打开终端,进入chapt2_ws/src运行上面的指令,创建完成后的目录结构如下:
.
└── src
└── example_cpp
├── CMakeLists.txt
├── include
│ └── example_cpp
├── package.xml
└── src
5 directories, 2 files
2.创建节点
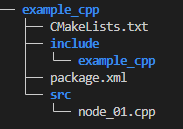
接着我们在example_cpp/src下创建一个node_01.cpp文件,创建完成后的目录结构如下:
3.编写代码
3.1 编写代码
继续跟着一起输入代码,输入的时候可以边输边理解。
#include "rclcpp/rclcpp.hpp"
int main(int argc, char **argv)
{
/* 初始化rclcpp */
rclcpp::init(argc, argv);
/*产生一个node_01的节点*/
auto node = std::make_shared<rclcpp::Node>("node_01");
// 打印一句自我介绍
RCLCPP_INFO(node->get_logger(), "node_01节点已经启动.");
/* 运行节点,并检测退出信号 Ctrl+C*/
rclcpp::spin(node);
/* 停止运行 */
rclcpp::shutdown();
return 0;
}
3.2 修改CmakeLists
在node_01.cpp中输入上面的内容后,还需要修改一下CMakeLists.txt。将其添加为可执行文件,并使用install指令将其安装到install目录。
在CmakeLists.txt最后一行加入下面两行代码。
add_executable(node_01 src/node_01.cpp)
ament_target_dependencies(node_01 rclcpp)
添加这两行代码的目的是让编译器编译node_01这个文件,接着在上面两行代码下面添加下面的代码。
install(TARGETS
node_01
DESTINATION lib/${PROJECT_NAME}
)
2.编译运行节点
在chapt2_ws下依次输入下面的命令
2.1 编译节点
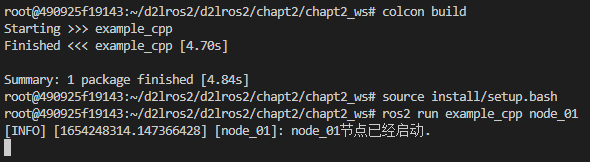
colcon build
2.2 source环境
source install/setup.bash
2.3 运行节点
ros2 run example_cpp node_01
不出意外,你可以看到
3.测试
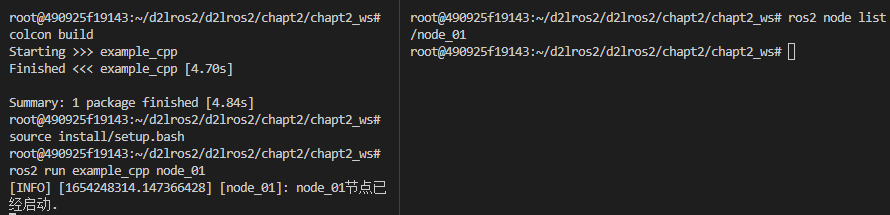
当节点运行起来后,可以再尝试使用ros2 node list指令来查看现有的节点。这个时候你应该能看到:
4.总结
至此,相信你已经掌握了如何编写一个C++版本的ros2节点了,但是这仅仅是编写ROS2节点方式之一,相比之下,更推荐你使用面向对象的方式编写节点,在进阶篇将会向你展示其写法。
5.使用RCLPY编写节点
1.创建Python功能包
创建一个名字叫做example_py python版本的功能包。
cd chapt2/chapt2_ws/src/
ros2 pkg create example_py --build-type ament_python --dependencies rclpy
创建完成后的目录结构
.
├── example_py
│ └── __init__.py
├── package.xml
├── resource
│ └── example_py
├── setup.cfg
├── setup.py
└── test
├── test_copyright.py
├── test_flake8.py
└── test_pep257.py
3 directories, 8 files
2.编写程序
编写ROS2节点的一般步骤
1. 导入库文件
2. 初始化客户端库
3. 新建节点
4. spin循环节点
5. 关闭客户端库
在example_py/example_py下创建node_02.py接着我们开始编写代码。跟着一起边理解输入下面的代码,注释不用输。
import rclpy
from rclpy.node import Node
def main(args=None):
"""
ros2运行该节点的入口函数
编写ROS2节点的一般步骤
1. 导入库文件
2. 初始化客户端库
3. 新建节点对象
4. spin循环节点
5. 关闭客户端库
"""
rclpy.init(args=args) # 初始化rclpy
node = Node("node_02") # 新建一个节点
node.get_logger().info("大家好,我是node_02.")
rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)
rclpy.shutdown() # 关闭rclpy
代码编写完成用Crtl+S进行保存。接着修改setup.py。
entry_points={
'console_scripts': [
"node_02 = example_py.node_02:main"
],
},
)
setup.py这段配置是声明一个ROS2的节点,声明后使用colcon build才能检测到,从而将其添加到install目录下。
完成上面的工作后,就可以编译运行了。
3.编译运行节点
打开vscode终端,进入chapt2/chapt2_ws/
3.1 编译节点
cd chapt2/chapt2_ws/
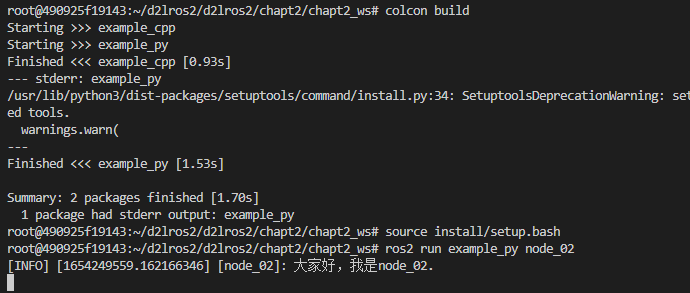
colcon build
--- stderr: example_py /usr/lib/python3/dist-packages/setuptools/command/install.py:34: SetuptoolsDeprecationWarning: setup.py install is deprecated. Use build and pip and other standards-based tools. warnings.warn( ---如果在编译中看到上述错误没关系,不影响使用,ros2官方正在修复。 错误原因是setuptools版本太高造成,使用下面的指令可以进行版本的回退。
sudo pip install setuptools==58.2.0 --upgrade
3.2 source环境
source install/setup.bash
3.3 运行节点
ros2 run example_py node_02
运行结果
4.测试
当节点运行起来后,可以再尝试使用ros2 node list指令来查看现有的节点。这个时候你应该能看到:
这说明你的节点已经运行起来了。
5.总结
本节我们学习了使用Python在工作空间的功能包里编写一个节点,代码是相同的,但是多了一些配置。
当然除了使用这种方法编写一个节点,还有其他方式,将其放到了进阶篇来讲。