datetime:2023/11/08 16:27
author:nzb
该项目来源于大佬的动手学ROS2
4.建图前准备3-准备URDF
关于URDF在第八章我们已经介绍了,接下来我们直接使用它来编写URDF。
一、新建功能包
在 fishbot/src 目录下创建一个新的功能包,命名为 fishbot_description:
cd ~/fishbot_ws/src
ros2 pkg create --build-type ament_python fishbot_description
二、编写URDF
在 src/fishbot_description/ 目录下新建 urdf 文件夹,然后新建 fishbot_v1.0.0.urdf 文件 ,编写如下内容:
<?xml version="1.0"?>
<robot name="fishbot">
<!-- Robot Footprint -->
<link name="base_footprint"/>
<joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0.0 0.0 0.076" rpy="0 0 0"/>
</joint>
<!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</visual>
</link>
<!-- laser link -->
<link name="laser_frame">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link>
<!-- laser joint -->
<joint name="laser_joint" type="fixed">
<parent link="base_link" />
<child link="laser_frame" />
<origin xyz="0 0 0.075" />
</joint>
<link name="imu_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</visual>
</link>
<!-- imu joint -->
<joint name="imu_joint" type="fixed">
<parent link="base_link" />
<child link="imu_link" />
<origin xyz="0 0 0.02" />
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="left_wheel_link" />
<origin xyz="-0.02 0.10 -0.06" />
<axis xyz="0 1 0" />
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="right_wheel_link" />
<origin xyz="-0.02 -0.10 -0.06" />
<axis xyz="0 1 0" />
</joint>
<link name="caster_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link>
<joint name="caster_joint" type="fixed">
<parent link="base_link" />
<child link="caster_link" />
<origin xyz="0.06 0.0 -0.076" />
<axis xyz="0 1 0" />
</joint>
</robot>
接着修改:src/fishbot_description/setup.py 文件 ,拷贝所有 URDF 到 Install 目录。
from setuptools import setup
from glob import glob
import os
package_name = 'fishbot_description'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'urdf'), glob('urdf/**')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='root',
maintainer_email='root@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
"rotate_wheel= fishbot_description.rotate_wheel:main"
],
},
)
三、编写Launch文件
在 fishbot_bringup 下新建 launch 文件夹,然后新建 fishbot_bringup.launch.py,接着编写如下内容:
import os
from launch import LaunchDescription
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
def generate_launch_description():
package_name = 'fishbot_description'
urdf_name = "fishbot_v1.0.0.urdf"
ld = LaunchDescription()
pkg_share = FindPackageShare(package=package_name).find(package_name)
urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}')
robot_state_publisher_node = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
arguments=[urdf_model_path]
)
joint_state_publisher_node = Node(
package='joint_state_publisher',
executable='joint_state_publisher',
name='joint_state_publisher',
arguments=[urdf_model_path],
output='screen',
)
fishbot_bringup_node = Node(
package='fishbot_bringup',
executable='fishbot_bringup',
name='fishbot_bringup',
output='screen',
)
ld.add_action(joint_state_publisher_node)
ld.add_action(robot_state_publisher_node)
ld.add_action(fishbot_bringup_node)
return ld
接着修改:src/fishbot_bringup/CMakeLists.txt
添加拷贝 launch 指令
install(
DIRECTORY launch
DESTINATION share/${PROJECT_NAME}
)
四 、编译运行测试
colcon build
source install/setup.bash
ros2 launch fishbot_bringup fishbot_bringup.launch.py
接着测试查看 TF
ros2 run rqt_tf_tree rqt_tf_tree
最终得到下图
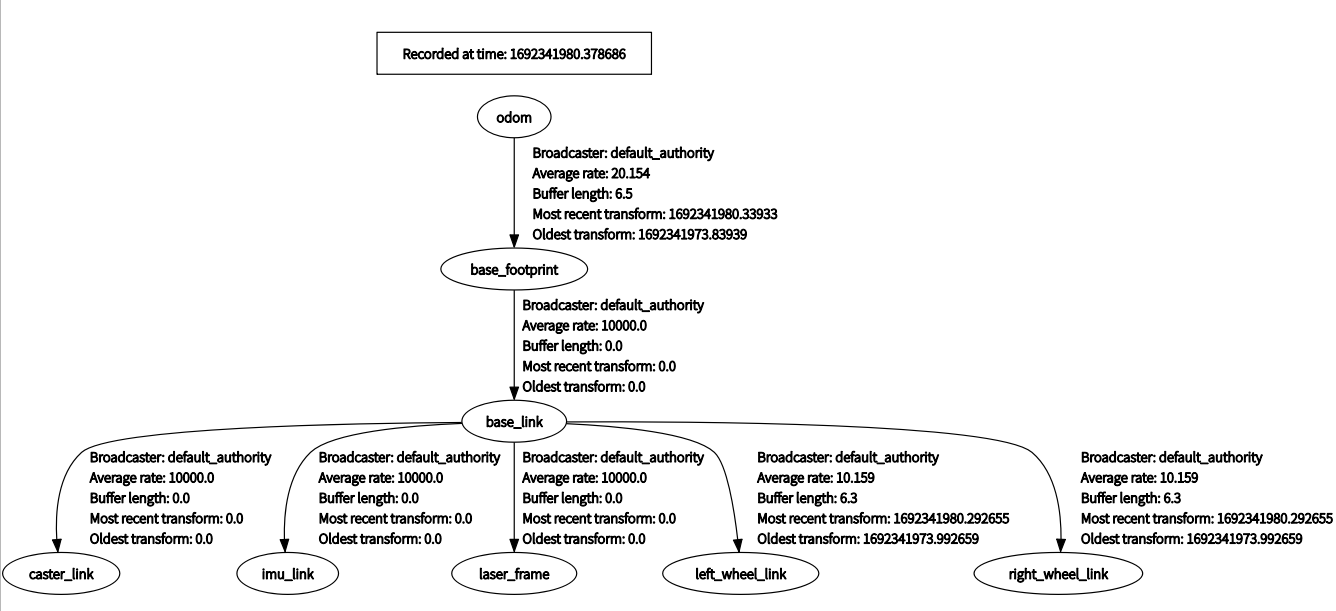
五、总结
有了这样一个TF结构,我们的建图前的准备工作就差不多了。