datetime:2025/12/27 12:51
author:nzb
该项目来源于mujoco_learning
friction
friction 有三个参数分别是滑动摩擦,转动摩擦,滚动摩擦系数
option(椭圆/金字塔)
cone=[pyramidal, elliptic] 摩擦力近似计算方法,默认 pyramidal 金字塔计算速度快, elliptic 椭圆效果更好
impratio="1" 椭圆摩擦的比例,更高的数值摩擦力会更硬一些,防止打滑,不建议在使用 pyramidal 的时候调大,适合机械臂抓取打滑时调整参数
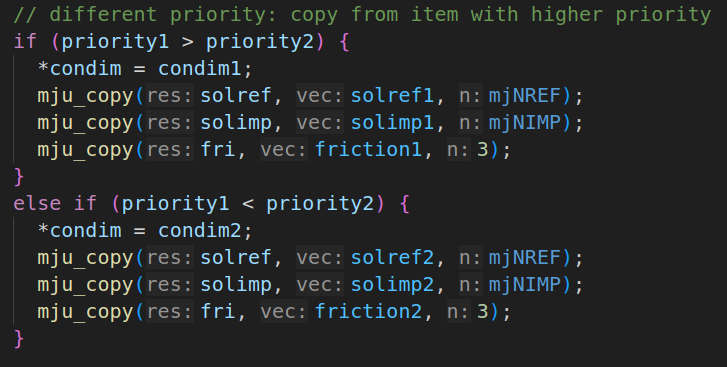
优先级
摩擦计算的时候会先根据 geom 的 priority 选择使用那个 geom 的 friction 参数,如果相同就会选择最大的使用
源码位置:engine/engine_collision_driver.c: mj_contactParam

condim设置
| condim | 作用 |
|---|---|
| 1 | 只有垂直于接触面的法向力,两个物体碰撞或者挤压产生的力 |
| 3 | 可以生成接触面上的力,也就是常见的摩擦力,friction第一个参数调控 |
| 4 | 增加了抑制在绕接触面法线旋转的摩擦力,friction第二个参数调控 |
| 6 | 会抑制滚动,滚动摩擦力是滚动过程中接触变形产生的能量损耗,friction第三个参数调控 |
计算
约束力维度
摩擦力在mujoco中是约束力的一部分,根据不同condim会产生不同数量的约束力,elliptic产生condim相同维度的约束力,pyramidal则会产生2(condim-1)维度的约束力
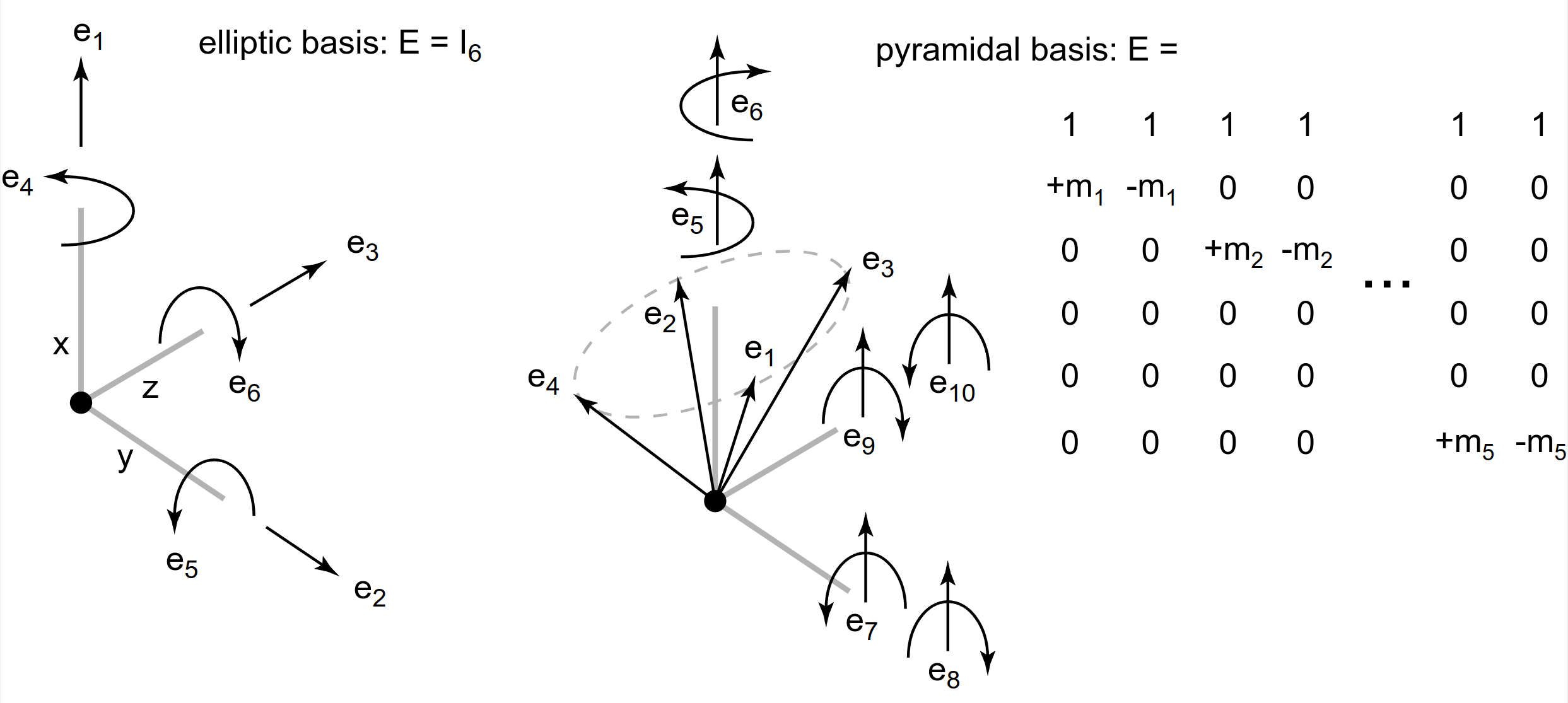 *condim和约束力维度:
|condim|elliptic|pyramidal|
|-|-|-|
|1|e1|e1|
|3|e1~e3|e1~e4|
|4|e1~e4|e1~e6|
|6|e1~e6|e1~e10|
*condim和约束力维度:
|condim|elliptic|pyramidal|
|-|-|-|
|1|e1|e1|
|3|e1~e3|e1~e4|
|4|e1~e4|e1~e6|
|6|e1~e6|e1~e10|
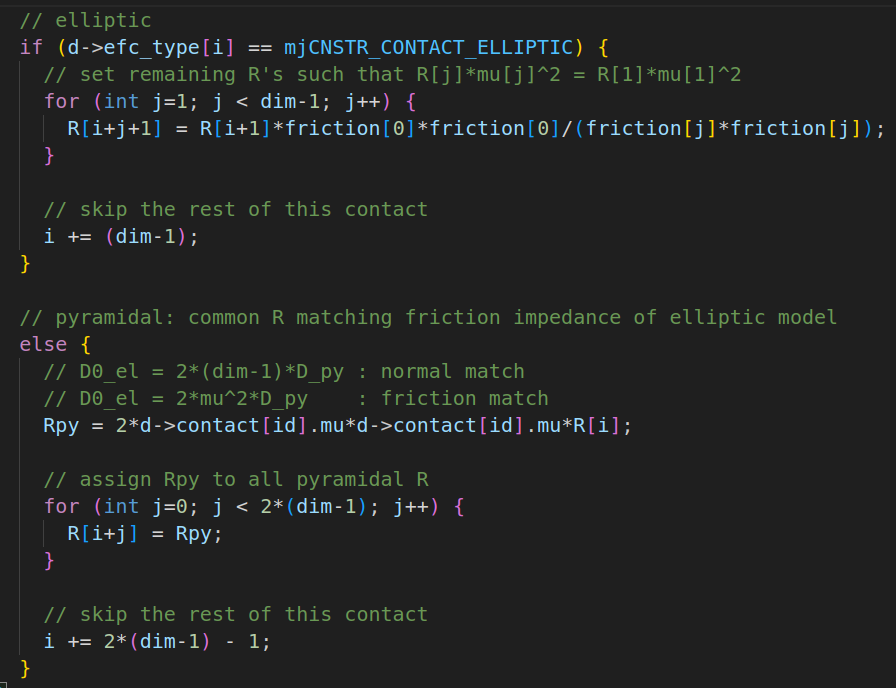
约束力对应摩擦系数: |elliptic|pyramidal|| |-|-|-| |e1|e1|None| |e1~e3|e1~e4|friction1| |e4|e5,e6|friction2| |e5,e6|e7~e10|friction3|
源码:
engine/engine_core_constraint.c:getposdim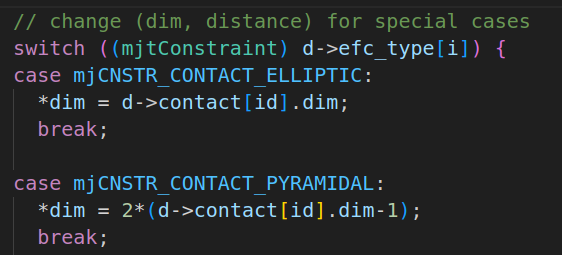
engine/engine_core_constraint.c:mj_makeImpedance
下面friction是一个长度为5的数组,fri是mjcf中定义的friction参数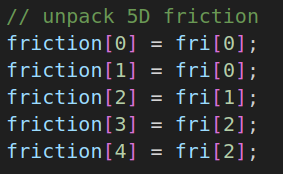
官方文档:
<?xml version="1.0" encoding="utf-8"?>
<mujoco model="inverted_pendulum">
<compiler angle="radian"/>
<option timestep="0.002" gravity="0 0 -9.81" wind="0 0 0" integrator="implicitfast"
cone="elliptic" impratio="1"/>
<visual>
<global realtime="1" />
<quality shadowsize="16384" numslices="28" offsamples="4" />
<headlight diffuse="1 1 1" specular="0.5 0.5 0.5" active="1" />
<rgba fog="1 0 0 1" haze="1 1 1 1" />
</visual>
<asset>
<texture type="skybox" file="./imgs/desert.png"
gridsize="3 4" gridlayout=".U..LFRB.D.." />
<texture name="plane" type="2d" builtin="checker" rgb1=".1 .1 .1" rgb2=".9 .9 .9"
width="512" height="512" mark="cross" markrgb=".8 .8 .8" />
<material name="plane" reflectance="0.3" texture="plane" texrepeat="1 1" texuniform="true" />
<texture name="y_and_c" type="cube" builtin="checker" rgb1="1 1 0" rgb2="0 1 1"
width="512" height="512" />
<material name="y_and_c" reflectance="0.3" texture="y_and_c" texrepeat="1 1"
texuniform="true" />
<texture name="r_and_b" type="cube" builtin="checker" rgb1="1 0 0" rgb2="0 0 1"
width="512" height="512" />
<material name="r_and_b" reflectance="0.3" texture="r_and_b" texrepeat="1 1"
texuniform="true" />
<texture name="g_and_b" type="cube" builtin="checker" rgb1="0 1 0" rgb2="0 0 1"
width="512" height="512" />
<material name="g_and_b" reflectance="0.3" texture="g_and_b" texrepeat="1 1"
texuniform="true" />
<texture name="r2b" type="cube" builtin="gradient" rgb1="1 0 0" rgb2="0 0 1"
width="512" height="512" />
<material name="r2b" reflectance="0.3" texture="r2b" texrepeat="1 1"
texuniform="true" />
<texture name="g2b" type="cube" builtin="gradient" rgb1="0 1 0" rgb2="0 0 1"
width="512" height="512" />
<material name="g2b" reflectance="0.3" texture="g2b" texrepeat="1 1" texuniform="true" />
<mesh name="slope1"
vertex="0 0 0
1 0 0
1 2 0
0 2 0
1 2 1
0 2 1" />
<mesh name="slope2"
vertex="0 0 0
1 0 0
1 2 0
0 2 0
1 2 0.5
0 2 0.5" />
</asset>
<worldbody>
<geom name="floor" pos="0 0 0" size="10 10 .1" type="plane" material="plane"
condim="3" friction="1 0.005 0.0001" priority="-1" />
<light directional="true" ambient=".3 .3 .3" pos="30 30 30" dir="0 -2 -1"
diffuse=".5 .5 .5" specular=".5 .5 .5" />
<body pos="-1 -1 0.3">
<freejoint />
<geom type="box" mass="1" size="0.3 0.3 0.3" condim="1" friction="1 0.005 0.0001"
rgba="1 0.2 0.2 1" />
</body>
<body pos="0 -1 0.3">
<freejoint />
<geom type="box" mass="1" size="0.3 0.3 0.3" condim="3" friction="1 0.005 0.0001"
rgba="0.2 1 0.2 1" />
</body>
<body pos="-1 0 0.3">
<freejoint />
<geom type="sphere" mass="1" size="0.3" condim="3" friction="1 0.01 0.01"
material="r_and_b" />
</body>
<body pos="0 0 0.3">
<freejoint />
<geom type="sphere" mass="1" size="0.3" condim="4" friction="1 0.01 0.01"
material="y_and_c" />
</body>
<body pos="1 0 0.3">
<freejoint />
<geom type="sphere" mass="1" size="0.3" condim="6" friction="1 0.01 0.01"
material="g_and_b" />
</body>
<!-- 斜坡 -->
<body pos="-2.5 1 0">
<geom type="mesh" mesh="slope1" priority="-1" material="r2b" />
</body>
<body pos="-2 2.6 1.2">
<freejoint />
<geom type="cylinder" mass="1" size="0.3" condim="1" fromto="0 0 0 0 0.1 -0.2"
friction="1 0.005 0.01" material="r2b" />
</body>
<body pos="-1 1 0">
<geom type="mesh" mesh="slope1" priority="-1" material="g2b" />
</body>
<body pos="-0.5 2.6 1.2">
<freejoint />
<geom type="cylinder" mass="1" size="0.3" condim="3" fromto="0 0 0 0 0.1 -0.2"
friction="1 0.005 0.01" material="g2b" />
</body>
<body pos="1.5 1 0">
<geom type="mesh" mesh="slope2" priority="-1" material="r2b" />
</body>
<body pos="2 2.6 0.7">
<freejoint />
<geom type="sphere" mass="1" size="0.3" condim="4" friction="1 0.005 0.01"
material="r2b" />
</body>
<body pos="2.5 1 0">
<geom type="mesh" mesh="slope2" priority="-1" material="g2b" />
</body>
<body pos="3 2.6 0.7">
<freejoint />
<geom type="sphere" mass="1" size="0.3" condim="6" friction="1 0.005 0.05"
material="g2b" />
</body>
</worldbody>
</mujoco>