datetime:2023/05/12 10:30
author:nzb
BT9:各种调试工具介绍
1、Groot
Groot是与BehaviorTree.CPP搭配使用的工具,分为Editor、Monitor、Log Replay 3种模式,具有行为树编辑、状态监控、历史log回放等功能。
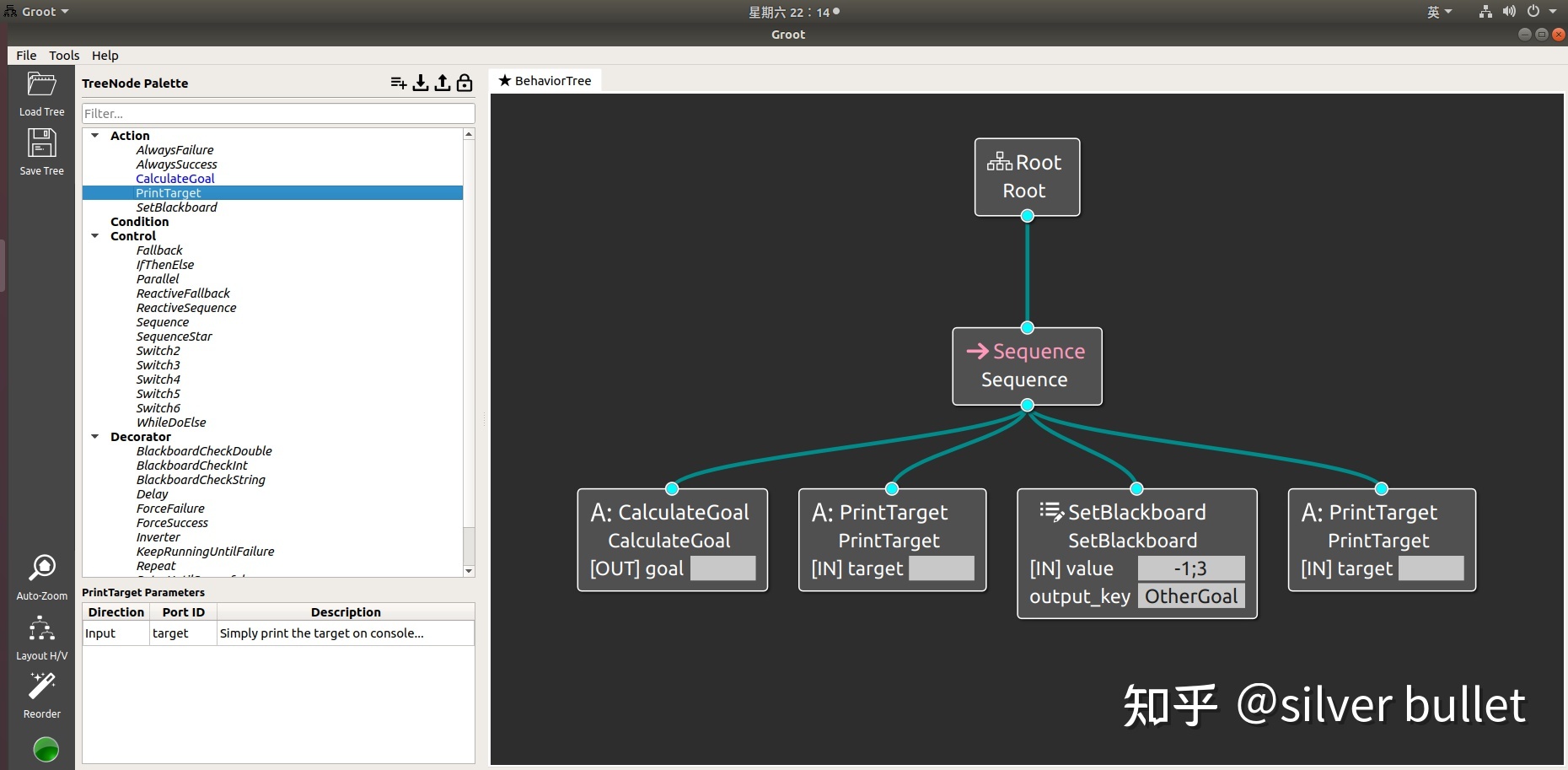
在Groot中可以图形化的方式创建节点(node),为节点添加输入输出端口(port),可以像Visio一样拖动、连接节点,从而构造行为树,而无需在意节点代码是否完成。 将树保存、导出为xml文件,可以被BehaviorTree.CPP
的接口读入并解析。这样就可以避免开发者自行编写xml文件的复杂局面。
如BehaviorTree.CPP/examples/t03_generic_ports.cpp中这样定义了一棵行为树:
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<Sequence name="root">
<CalculateGoal goal="{GoalPosition}"/>
<PrintTarget target="{GoalPosition}"/>
<SetBlackboard output_key="OtherGoal" value="-1;3"/>
<PrintTarget target="{OtherGoal}"/>
</Sequence>
</BehaviorTree>
</root>
在Groot中依此创建,如图所示:
将其保存为xml文件,如下所示。和上段代码的区别在于缺失了blackboard entry的指定,增加了node的类型。其实这2段代码都可以被Groot加载和解析。
<?xml version="1.0"?>
<root main_tree_to_execute="BehaviorTree">
<!-- ////////// -->
<BehaviorTree ID="BehaviorTree">
<Sequence>
<Action ID="CalculateGoal" goal=""/>
<Action ID="PrintTarget" target=""/>
<SetBlackboard output_key="OtherGoal" value="-1;3"/>
<Action ID="PrintTarget" target=""/>
</Sequence>
</BehaviorTree>
<!-- ////////// -->
<TreeNodesModel>
<Action ID="CalculateGoal">
<output_port name="goal"/>
</Action>
<Action ID="PrintTarget">
<input_port name="target">Simply print the target on console...</input_port>
</Action>
</TreeNodesModel>
<!-- ////////// -->
</root>
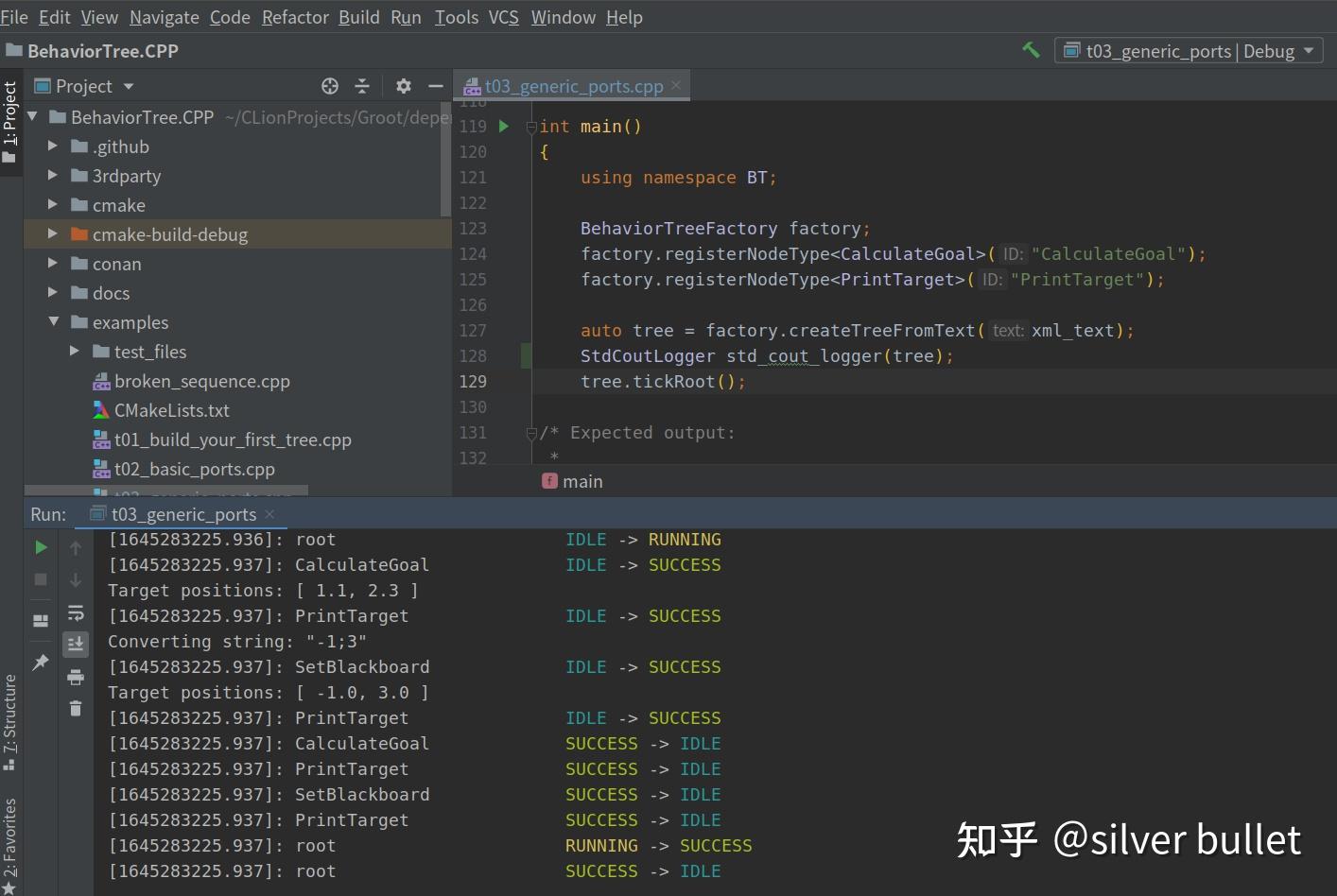
2、StdCoutLogger
作用:在终端打印行为树中的节点执行状态变化。
代码仅需在加载tree后添加StdCoutLogger类的1个实例(且只能有1个实例),运行效果如下:
BehaviorTree.CPP/examples/t05_crossdoor.cpp中也有本文各工具的使用示例。
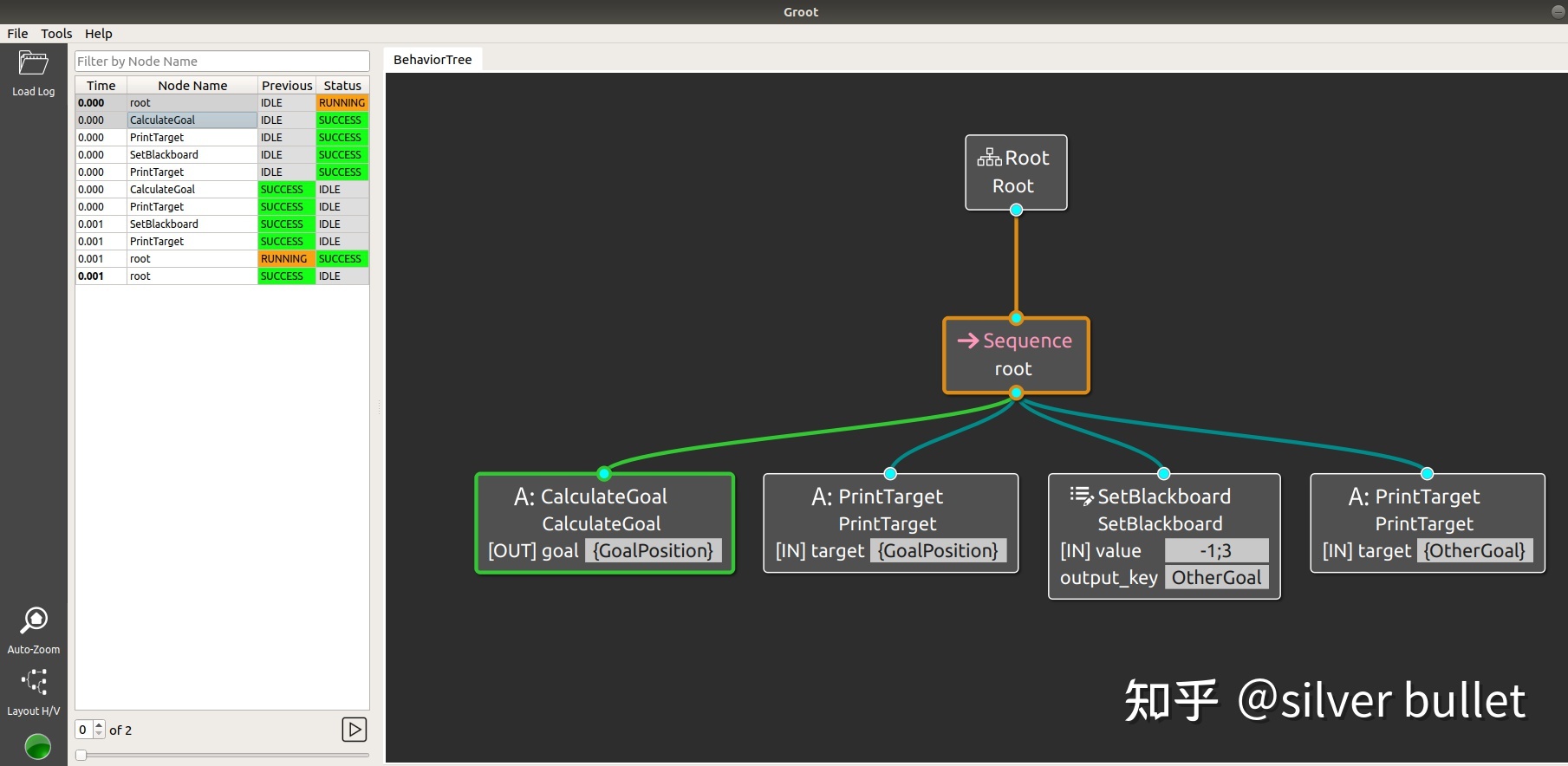
3、FileLogger
作用:行为树中的节点执行状态变化保存在文件中(必须是*.fbl格式文件),可以通过Groot打开并回放执行过程。
代码仅需在加载tree后添加FileLogger类的1个实例,运行效果如下:

Groot选择Log Replay模式后加载bt_trace.fbl,如下。当选中左侧的节点时,右侧会通过线条的颜色来表示执行的状态(绿色-SUCCESS,橙色-RUNNING,青色-未执行)。
4、MinitraceLogger
作用:保存节点的执行时序。
代码仅需在加载tree后添加FileLogger类的1个实例(且只能有1个实例),运行效果如下:

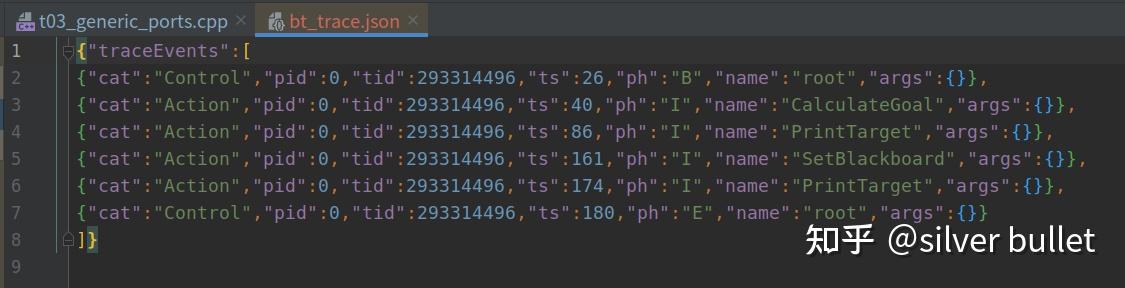
生成的json文件内容如下:
5、PublisherZMQ
作用:在节点执行的同时发布其状态变化,在Groot中实时观察。
代码仅需在加载tree后添加PublisherZMQ类的1个实例(且只能有1个实例)。
Groot需要选择Monitor模式,并设置下列输入。如果行为树与Groot都在同一台机器运行的话,就自发自收,Server IP可以设置为“127.0.0.1”,Publisher Port设置为“1666
”,Server Port设置为“1667”。
Groot会自动获得树的结构,无需用户手动加载,但是它会自动展开1棵树中的所有子树,使得界面内容非常密集,因此复杂的树并不方便观察。
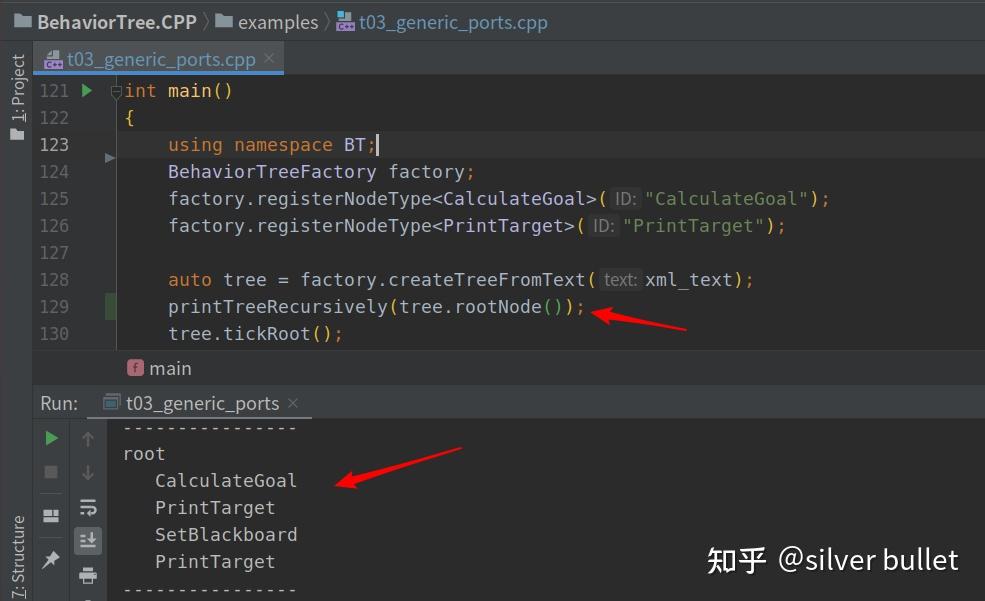
6、printTreeRecursively内置函数
作用:层级打印树结构,默认打印在终端。
该函数定义在BehaviorTree.CPP/include/behaviortree_cpp_v3/behavior_tree.h中,声明和运行效果如下。
void printTreeRecursively(const TreeNode* root_node);
7、debugMessage内置函数
打印不同的树之间的端口(port)映射关系,也可以反映出port是否被设置值。
该函数定义在BehaviorTree.CPP/include/behaviortree_cpp_v3/blackboard.h
中,BehaviorTree.CPP/examples/t06_subtree_port_remapping.cpp有代码示例。
void Blackboard::debugMessage() const {
for (const auto& entry_it : storage_) {
auto port_type = entry_it.second.port_info.type();
if (!port_type) {
port_type = &(entry_it.second.value.type());
}
std::cout << entry_it.first << " (" << demangle(port_type) << ") -> ";
if (auto parent = parent_bb_.lock()) {
auto remapping_it = internal_to_external_.find(entry_it.first);
// if条件满足,说明有port外部映射
if (remapping_it != internal_to_external_.end()) {
std::cout << "remapped to parent [" << remapping_it->second << "]"
<< std::endl;
continue;
}
}
// 若此处打印,而不是在上面continue处返回,说明没有外部映射
// empty表明该port没有值(从未被设置值),无法读取,读取会抛出异常
// full表明该port有值,可以被读取
std::cout << ((entry_it.second.value.empty()) ? "empty" : "full")
<< std::endl;
}
}