datetime:2025/12/30 20:32
author:nzb
该项目来源于mujoco_learning
3D绘制
mujoco 提供显示基础几何体和 mujoco 提供的一些特殊渲染几何体。查看文档可知 mjv_initGeom 函数能在渲染场景中增加几何体,mjv_connector可以用mjv_initGeom初始化的几何体绘制提供的一些特殊形状(如箭头,直线等)。
mujoco 显示画面的原理是通过 mjv_updateScene 将仿真数据储存到 mjvScene 中,这是已经处理好的几何数据,接下来使用 mjr_render 传递给 opengl 渲染。我们在绘制过程中是要在仿真的几何数据处理完之后,加入绘制信息,再交给 opengl 渲染。
在 mjvScene 中添加信息,其实是直接在 mjvScene 的 geoms 后面续写,而且要增加 ngeom 长度。这里通过注释可以理解, mjvScene 根据 ngeom 确定几何体数量再从 geoms 中获取资源。

初始化几何体mjv_initGeom函数原型:

mjv_connector函数原型:

geom是传入的仅绘制的几何体,需要使用mjv_initGeom初始化,type见下面,width是绘制的宽度,这个是对于
渲染出来的画面的宽度,from起点,to终点
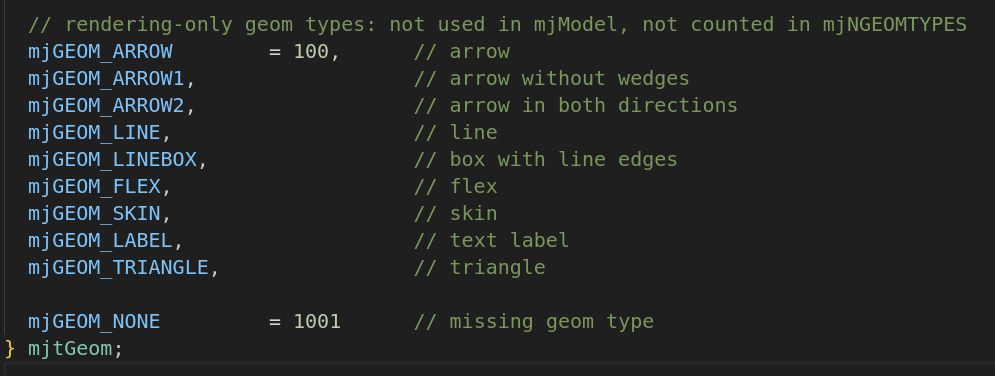
这里是可以绘制的几何形状类型,分别是箭头,无楔形箭头,双向箭头,直线。
*演示——绘制几何体函数:*def draw_geom(type, size, pos, mat, rgba):
viewer.user_scn.ngeom += 1
geom = viewer.user_scn.geoms[viewer.user_scn.ngeom - 1]
mujoco.mjv_initGeom(geom, type, size, pos, mat, rgba)
......
size = [0.0, 0.0, 0.0]
pos = [0, 0, 0]
mat = [0, 0, 0, 0, 0, 0, 0, 0, 0]
rgba = [1.0, 0.0, 0.0, 1.0]
draw_geom(mujoco.mjtGeom.mjGEOM_SPHERE, size, pos, mat, rgba)
def draw_line(start, end, width, rgba):
viewer.user_scn.ngeom += 1
geom = viewer.user_scn.geoms[viewer.user_scn.ngeom - 1]
size = [0.0, 0.0, 0.0]
pos = [0, 0, 0]
mat = [0, 0, 0, 0, 0, 0, 0, 0, 0]
mujoco.mjv_initGeom(geom, mujoco.mjtGeom.mjGEOM_SPHERE, size, pos, mat, rgba)
mujoco.mjv_connector(geom, mujoco.mjtGeom.mjGEOM_LINE, width, start, end)
......
pos_start = [0, 0, 0]
end = [0, 1, 1]
rgba = [1.0, 0.0, 0.0, 1.0]
draw_line(pos_start, end, 20, rgba)
def draw_arrow(start, end, width, rgba):
viewer.user_scn.ngeom += 1
geom = viewer.user_scn.geoms[viewer.user_scn.ngeom - 1]
size = [0.0, 0.0, 0.0]
pos = [0, 0, 0]
mat = [0, 0, 0, 0, 0, 0, 0, 0, 0]
mujoco.mjv_initGeom(geom, mujoco.mjtGeom.mjGEOM_SPHERE, size, pos, mat, rgba)
mujoco.mjv_connector(geom, mujoco.mjtGeom.mjGEOM_ARROW, width, start, end)
......
pos_start2 = [0, 0, 0]
end2 = [0, -1, 1]
rgba2 = [0.0, 1.0, 0.0, 0.5]
draw_arrow(pos_start2, end2, 0.1, rgba2)
2D绘制
字体尺寸的初始化:
 python:
python:
context = mujoco.MjrContext(m, mujoco.mjtFontScale.mjFONTSCALE_150)
查阅文档我们可知2D绘制要在mjr_render之后进行

MJAPI void mjr_text(int font, const char* txt, const mjrContext* con,
float x, float y, float r, float g, float b);
font:字号,使用mjtFont中定义的txt:文本con:mjrContextx,y:渲染界面比例位置,取值[0-1)r,g,b:字体颜色
Python:
mujoco.mjr_text(mujoco.mjtFont.mjFONT_NORMAL, "Albusgive", context, 0, 0.8, 1, 0, 1)
MJAPI void mjr_overlay(int font, int gridpos, mjrRect viewport,
const char* overlay, const char* overlay2, const mjrContext* con);
font:字号,使用mjtFont中定义的gridpos:绘制位置,使用mjtGridPos中定义的mjrRect:mjrRect,界面矩形overlay:第一列overlay2:第二列con:mjrContext
Python:
mujoco.mjr_overlay(mujoco.mjtFont.mjFONT_NORMAL, mujoco.mjtGridPos.mjGRID_TOPLEFT, viewport, "github", "Albusgive", context)
MJAPI void mjr_rectangle(mjrRect viewport, float r, float g, float b, float a);
mjrRect:mjrRect,矩形rgba:颜色
Python:
viewport2 = mujoco.MjrRect(50, 100, 50, 50)
mujoco.mjr_rectangle(viewport2, 0.5, 0, 1, 0.6)
MJAPI void mjr_label(mjrRect viewport, int font, const char* txt,
float r, float g, float b, float a, float rt, float gt, float bt,
const mjrContext* con);
viewport:标签位置font:字号,使用mjtFont中定义的txt:文本rgba:标签底色rt,gt,bt:文字颜色con:mjrContext
Python:
viewport3 = mujoco.MjrRect(100, 200, 150, 50)
mujoco.mjr_label(viewport3, mujoco.mjtFont.mjFONT_NORMAL, "Albusgive", 0, 0, 1, 1, 1, 1,1, context)
代码
import time
import math
import mujoco
import mujoco.viewer
import cv2
import glfw
import numpy as np
m = mujoco.MjModel.from_xml_path('../../API-MJCF/mecanum.xml')
d = mujoco.MjData(m)
def get_sensor_data(sensor_name):
sensor_id = mujoco.mj_name2id(m, mujoco.mjtObj.mjOBJ_SENSOR, sensor_name)
if sensor_id == -1:
raise ValueError(f"Sensor '{sensor_name}' not found in model!")
start_idx = m.sensor_adr[sensor_id]
dim = m.sensor_dim[sensor_id]
sensor_values = d.sensordata[start_idx : start_idx + dim]
return sensor_values
# 初始化glfw
glfw.init()
glfw.window_hint(glfw.VISIBLE,glfw.FALSE)
window = glfw.create_window(1200,900,"mujoco",None,None)
glfw.make_context_current(window)
#创建相机
camera = mujoco.MjvCamera()
camID = mujoco.mj_name2id(m, mujoco.mjtObj.mjOBJ_CAMERA, "this_camera")
camera.fixedcamid = camID
camera.type = mujoco.mjtCamera.mjCAMERA_FIXED
scene = mujoco.MjvScene(m, maxgeom=1000)
context = mujoco.MjrContext(m, mujoco.mjtFontScale.mjFONTSCALE_150) # 字体渲染大小缩放
mujoco.mjr_setBuffer(mujoco.mjtFramebuffer.mjFB_OFFSCREEN, context)
with mujoco.viewer.launch_passive(m, d) as viewer:
def draw_geom(type, size, pos, mat, rgba):
viewer.user_scn.ngeom += 1 # 几何体加1
geom = viewer.user_scn.geoms[viewer.user_scn.ngeom - 1] # 创建几何体对象
mujoco.mjv_initGeom(geom, type, size, pos, mat, rgba) # 初始化几何体
def draw_line(start, end, width, rgba):
viewer.user_scn.ngeom += 1
geom = viewer.user_scn.geoms[viewer.user_scn.ngeom - 1]
size = [0.0, 0.0, 0.0] # 可不填,都给0,mjv_connector 会修改掉
pos = [0, 0, 0] # 可不填,都给0,mjv_connector 会修改掉
mat = [0, 0, 0, 0, 0, 0, 0, 0, 0] # 可不填,都给0,mjv_connector 会修改掉
mujoco.mjv_initGeom(geom, mujoco.mjtGeom.mjGEOM_SPHERE, size, pos, mat, rgba)
mujoco.mjv_connector(geom, mujoco.mjtGeom.mjGEOM_LINE, width, start, end)
def draw_arrow(start, end, width, rgba):
# 跟draw_line 几乎一致,只是 mjv_connector 的 type 不同
viewer.user_scn.ngeom += 1
geom = viewer.user_scn.geoms[viewer.user_scn.ngeom - 1]
size = [0.0, 0.0, 0.0]
pos = [0, 0, 0]
mat = [0, 0, 0, 0, 0, 0, 0, 0, 0]
mujoco.mjv_initGeom(geom, mujoco.mjtGeom.mjGEOM_SPHERE, size, pos, mat, rgba)
mujoco.mjv_connector(geom, mujoco.mjtGeom.mjGEOM_ARROW, width, start, end)
cnt = 0
start = time.time()
ngeom = viewer.user_scn.ngeom # 需要用到的场景信息
while viewer.is_running() and time.time() - start < 30:
d.ctrl[0] = math.sin(cnt)
d.ctrl[1] = math.cos(cnt)
d.ctrl[2] = math.sin(cnt)
cnt += 0.003
step_start = time.time()
mujoco.mj_step(m, d)
'''重置geom数量'''
viewer.user_scn.ngeom = ngeom # 需要重置,否则会一直增加,画出来就是一条轨迹,内存也可能溢出
'''3D绘制'''
size = [0.1, 0.0, 0.0]
pos = [0, 0, 1]
mat = [1, 0, 0, 0, 1, 0, 0, 0, 1] #坐标系,空间向量,x,y,z
rgba = [1.0, 0.0, 0.0, 1.0]
draw_geom(mujoco.mjtGeom.mjGEOM_SPHERE, size, pos, mat, rgba) # 圆
pos_start = [0, 1, 1]
end = [0, 3, 4]
draw_line(pos_start, end, 20, rgba)
pos_start2 = [0, 0, 1]
end2 = [0, -1, 1]
rgba2 = [0.0, 1.0, 0.0, 0.5]
draw_arrow(pos_start2, end2, 0.1, rgba2)
'''速度跟踪'''
base_lin_vel = get_sensor_data("base_lin_vel")
base_pos = get_sensor_data("base_pos")
base_pos[2] += 1 # z 轴加1
lin_start = base_pos # 箭头起点
lin_end = lin_start + base_lin_vel * 2 # 起点 + 速度向量* 缩放因子
draw_arrow(lin_start, lin_end, 0.1, rgba2)
w=640
h=480
viewport = mujoco.MjrRect(0, 0, w, h)
# 更新场景
mujoco.mjv_updateScene(
m, d, mujoco.MjvOption(),
None, camera, mujoco.mjtCatBit.mjCAT_ALL, scene
)
# 渲染到缓冲区
mujoco.mjr_render(viewport, scene, context)
'''2D绘制'''
mujoco.mjr_text(mujoco.mjtFont.mjFONT_SHADOW, "Albusgive", context, 0, 0.8, 1, 0, 1)
viewport2 = mujoco.MjrRect(50, 100, 50, 50) # 绘制位置
mujoco.mjr_overlay(mujoco.mjtFont.mjFONT_NORMAL, mujoco.mjtGridPos.mjGRID_TOPLEFT, viewport, "github", "Albusgive", context)
mujoco.mjr_rectangle(viewport2, 0.5, 0, 1, 0.6)
viewport3 = mujoco.MjrRect(100, 200, 150, 50)
mujoco.mjr_label(viewport3, mujoco.mjtFont.mjFONT_NORMAL, "Albusgive", 0, 1, 1, 1, 0, 0,0, context)
# 读取 RGB 数据(格式为 HWC, uint8)
rgb = np.zeros((h, w, 3), dtype=np.uint8)
mujoco.mjr_readPixels(rgb, None, viewport, context)
cv_image = cv2.cvtColor(np.flipud(rgb), cv2.COLOR_RGB2BGR)
cv2.imshow("img",cv_image)
cv2.waitKey(1)
# Example modification of a viewer option: toggle contact points every two seconds.
with viewer.lock():
viewer.opt.flags[mujoco.mjtVisFlag.mjVIS_CONTACTPOINT] = int(d.time % 2)
# Pick up changes to the physics state, apply perturbations, update options from GUI.
viewer.sync()
# Rudimentary time keeping, will drift relative to wall clock.
time_until_next_step = m.opt.timestep - (time.time() - step_start)
if time_until_next_step > 0:
time.sleep(time_until_next_step)
<mujoco model="example">
<compiler angle="radian" meshdir="meshes" autolimits="true" />
<option timestep="0.01" gravity="0 0 -9.81" integrator="implicitfast" />
<asset>
<texture type="skybox" file="../MJCF/asset/desert.png"
gridsize="3 4" gridlayout=".U..LFRB.D.." />
<texture name="plane" type="2d" builtin="checker" rgb1=".1 .1 .1" rgb2=".9 .9 .9"
width="512" height="512" mark="cross" markrgb=".8 .8 .8" />
<material name="plane" reflectance="0.3" texture="plane" texrepeat="1 1" texuniform="true" />
</asset>
<visual>
<!-- 质量 -->
<quality shadowsize="16384" numslices="28" offsamples="4" />
<headlight diffuse="1 1 1" specular="0.5 0.5 0.5" active="0" />
</visual>
<worldbody>
<light directional="true" pos="0 0 30" dir="0 -0.5 -1" />
<light directional="true" pos="0 0 30" dir="0 0.5 -1" />
<geom name="floor" pos="0 0 0" size="0 0 .25" type="plane" material="plane"
condim="3" />
<!-- <geom type="box" size="0.3 0.3 0.5"/> -->
<body name="base_body" pos="0 0 1">
<freejoint />
<camera name="this_camera" mode="fixed" pos="2 0 1.3" euler="0 1.0 1.57"
principalpixel="50 50" focalpixel="1080 1920" sensorsize="4 4"
resolution="1280 1080" />
<geom type="box" size="0.5 0.5 0.01" rgba="0.5 0.5 0.5 1" mass="15" />
<body name="Mecanum_A1" pos="0.5 0.6 0" euler="1.5707963267948966 0 0">
<joint name="a1" type="hinge" pos="0 0 0" axis="0 0 1" frictionloss=".000002" />
<geom type="cylinder" size="0.05 0.1" rgba=".1 .1 .1 1" />
<site type="cylinder" size="0.15 0.045" rgba=".5 .1 .1 .5" />
<replicate count="16" euler="0 0 0.3925">
<body euler="-0.78539815 0 0">
<joint type="hinge" pos="0.15 0 0" axis="0 0 1" frictionloss=".000002" />
<geom type="capsule" size="0.015 0.05" pos="0.15 0 0" />
</body>
</replicate>
</body>
<body name="Mecanum_B1" pos="-0.5 0.6 0" euler="1.5707963267948966 0 0">
<joint name="b1" type="hinge" pos="0 0 0" axis="0 0 1" frictionloss=".000002" />
<geom type="cylinder" size="0.05 0.1" rgba=".1 .1 .1 1" />
<site type="cylinder" size="0.15 0.045" rgba=".1 .1 .5 .5" />
<replicate count="16" euler="0 0 0.3925">
<body euler="0.78539815 0 0">
<joint type="hinge" pos="0.15 0 0" axis="0 0 1" frictionloss=".000002" />
<geom type="capsule" size="0.015 0.05" pos="0.15 0 0" />
</body>
</replicate>
</body>
<body name="Mecanum_A2" pos="-0.5 -0.6 0" euler="1.5707963267948966 0 0">
<joint name="a2" type="hinge" pos="0 0 0" axis="0 0 1" frictionloss=".000002" />
<geom type="cylinder" size="0.05 0.1" rgba=".1 .1 .1 1" />
<site type="cylinder" size="0.15 0.045" rgba=".5 .1 .1 .5" />
<replicate count="16" euler="0 0 0.3925">
<body euler="-0.78539815 0 0">
<joint type="hinge" pos="0.15 0 0" axis="0 0 1" frictionloss=".000002" />
<geom type="capsule" size="0.015 0.05" pos="0.15 0 0" />
</body>
</replicate>
</body>
<body name="Mecanum_B2" pos="0.5 -0.6 0" euler="1.5707963267948966 0 0">
<joint name="b2" type="hinge" pos="0 0 0" axis="0 0 1" frictionloss=".000002" />
<geom type="cylinder" size="0.05 0.1" rgba=".1 .1 .1 1" />
<site type="cylinder" size="0.15 0.045" rgba=".1 .1 .5 .5" />
<replicate count="16" euler="0 0 0.3925">
<body euler="0.78539815 0 0">
<joint type="hinge" pos="0.15 0 0" axis="0 0 1" frictionloss=".000002" />
<geom type="capsule" size="0.015 0.05" pos="0.15 0 0" />
</body>
</replicate>
</body>
</body>
</worldbody>
<tendon>
<fixed name="forward">
<joint joint="a1" coef="0.25" />
<joint joint="b1" coef="0.25" />
<joint joint="a2" coef="0.25" />
<joint joint="b2" coef="0.25" />
</fixed>
<fixed name="transverse" frictionloss="0.001">
<joint joint="a1" coef=".25" />
<joint joint="b1" coef="-0.25" />
<joint joint="a2" coef=".25" />
<joint joint="b2" coef="-0.25" />
</fixed>
<fixed name="roatate">
<joint joint="a1" coef=".25" />
<joint joint="b1" coef=".25" />
<joint joint="a2" coef="-.25" />
<joint joint="b2" coef="-.25" />
</fixed>
</tendon>
<actuator>
<velocity tendon="forward" name="forward" kv="30" ctrlrange="-15 15" />
<velocity tendon="transverse" name="transverse" kv="30" ctrlrange="-15 15" />
<velocity tendon="roatate" name="roatate" kv="30" ctrlrange="-15 15" />
</actuator>
<sensor>
<subtreelinvel name="base_lin_vel" body="base_body" />
<framepos name="base_pos" objtype="body" objname="base_body"/>
</sensor>
</mujoco>