datetime:2025/12/27 12:51
author:nzb
该项目来源于mujoco_learning
joint
 joint将body之间连接在一起,使其可以进行活动。这么说吧,body中的所有geom为一个整体然后joint是连接这些整体的。就是body和body靠joint活动,body中只能有一个joint用来连接当前body和上一层body。再根本一点就是joint对于上一层body是相对静止的,当前body与joint是在运动。
joint将body之间连接在一起,使其可以进行活动。这么说吧,body中的所有geom为一个整体然后joint是连接这些整体的。就是body和body靠joint活动,body中只能有一个joint用来连接当前body和上一层body。再根本一点就是joint对于上一层body是相对静止的,当前body与joint是在运动。
- name
tpye="[free/ball/slide/hinge]"自由关节,一般不用;球形关节,绕球旋转;滑轨;旋转关节pos="0 0 0"关节在body的位置axis="0 0 1"x,y,z活动轴,只有 slide 和 hinge 有用stiffness="0"弹簧,数值正让关节具有弹性, 一般调整 PD 控制器的 P 值(0-pos)*stiffnessrange="0 0"关节限制,当球形时只有二参有效,一参设置为0,但是要在compiler指定autolimitslimited="auto"此属性指定关节是否有限制damping="0"阻尼, 交叉滚子轴承damping, 在Isaac Gym中的PD控制器中,D 是damping,P 是stiffness(0-v)*damping, v 为速度frictionloss="0"关节摩擦损失armature="0"电枢,转子转动惯量*减速比^2(很小的值)ref角度偏置,每次计算的时候都会加上这个值返回
<?xml version="1.0" encoding="utf-8"?>
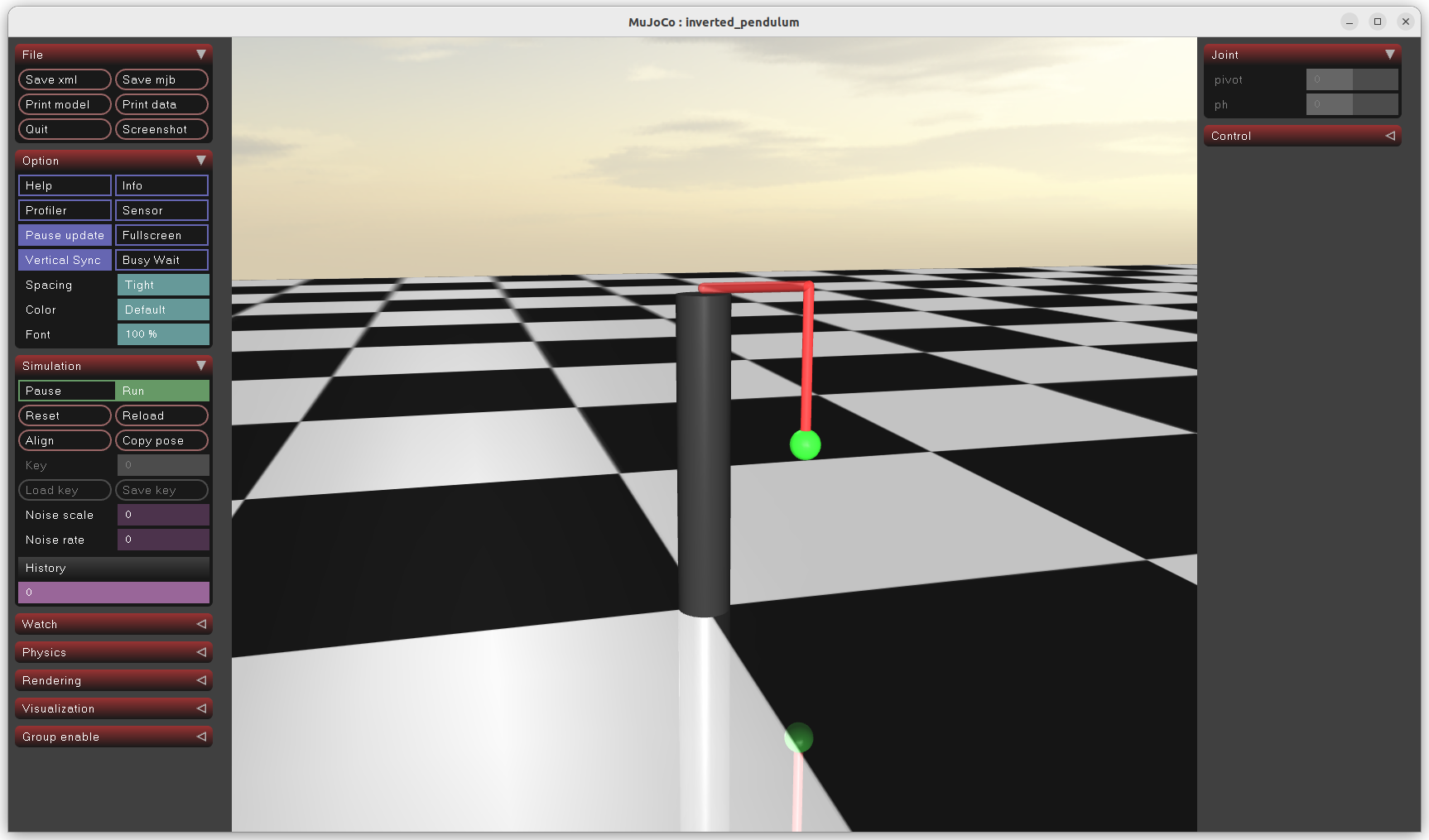
<mujoco model="inverted_pendulum">
<compiler angle="radian" meshdir="meshes" autolimits="true" />
<option timestep="0.002" gravity="0 0 -9.81" wind="0 0 0" integrator="implicitfast"
density="1.225"
viscosity="1.8e-5" />
<visual>
<global realtime="1" />
<quality shadowsize="16384" numslices="28" offsamples="4" />
<headlight diffuse="1 1 1" specular="0.5 0.5 0.5" active="1" />
<rgba fog="1 0 0 1" haze="1 1 1 1" />
</visual>
<asset>
<texture type="skybox" file="../asset/desert.png"
gridsize="3 4" gridlayout=".U..LFRB.D.." />
<texture name="plane" type="2d" builtin="checker" rgb1=".1 .1 .1" rgb2=".9 .9 .9"
width="512" height="512" mark="cross" markrgb=".8 .8 .8" />
<material name="plane" reflectance="0.3" texture="plane" texrepeat="1 1" texuniform="true" />
<material name="box" rgba="0 0.5 0 1" emission="0" />
</asset>
<default>
<geom solref=".5e-4" solimp="0.9 0.99 1e-4" fluidcoef="0.5 0.25 0.5 2.0 1.0" />
<default class="card">
<geom type="mesh" mesh="card" mass="1.84e-4" fluidshape="ellipsoid" contype="0"
conaffinity="0" />
</default>
<default class="collision">
<geom type="box" mass="0" size="0.047 0.032 .00035" group="3" friction=".1" />
</default>
</default>
<worldbody>
<geom name="floor" pos="0 0 0" size="10 10 .1" type="plane" material="plane"
condim="3" />
<light directional="true" ambient=".3 .3 .3" pos="30 30 30" dir="0 -2 -1"
diffuse=".5 .5 .5" specular=".5 .5 .5" />
<!-- 支撑柱 -->
<body name="support" pos="0 0 0.1">
<geom type="cylinder" mass="100" size="0.05 0.5" rgba="0.2 0.2 0.2 1"/>
<!-- 水平杆 -->
<body name="rotay_am" pos="0 0 0.51">
<joint type="hinge" name="pivot" pos="0 0 0" axis="0 0 1" damping="0.001"
frictionloss="0.0" stiffness="0.5"/>
<geom type="capsule" mass="0.01" fromto="0 0 0 0.2 0 0" size="0.01"
rgba="0.8 0.2 0.2 0.5"/>
<!-- 摆 -->
<body name="pendulum" pos="0.2 0 0">
<joint type="hinge" name="ph" pos="0 0 0" axis="1 0 0" damping="0.001"
frictionloss="0.0" />
<geom type="capsule" mass="0.005" fromto="0 0 0 0 0 -0.3" size="0.01"
rgba="0.8 0.2 0.2 1" />
<!-- 配重 -->
<geom type="sphere" mass="0.01" size="0.03" pos="0 0 -0.3" rgba="0.2 0.8 0.2 1" />
</body>
</body>
</body>
</worldbody>
</mujoco>