datetime:2023/11/01 10:06
author:nzb
该项目来源于大佬的动手学ROS2
9.速度转换-机器人最大速度测量
有了上一节的测量值,这一节我们尝试对电机最大速度进行测量。
一、新建工程并导入开源库
新建example26_max_speed_measurement
添加依赖
[env:featheresp32] ; 这是一个环境配置标签,指定了代码将运行的硬件平台和框架
platform = espressif32 ; 指定了使用的平台为Espressif 32
board = featheresp32 ; 指定使用的硬件板为Feather ESP32
framework = arduino ; 指定使用的框架为Arduino
lib_deps = ; 列出所有依赖库的URL,这些库将被下载和安装
https://github.com/fishros/Esp32PcntEncoder.git ; ESP32 编码器驱动库
二、编写代码
编写代码
#include <Arduino.h>
#include <Esp32PcntEncoder.h>
Esp32PcntEncoder encoders[2]; // 创建一个数组用于存储两个编码器
int64_t last_ticks[2]; // 记录上一次读取的计数器数值
int32_t pt[2]; // 记录两次读取之间的计数器差值
int64_t last_update_time; // 记录上一次更新时间
float speeds[2]; // 记录两个电机的速度
void setup()
{
// 1.初始化串口
Serial.begin(115200); // 初始化串口通信,设置通信速率为115200
// 2.设置编码器
encoders[0].init(0, 32, 33); // 初始化第一个编码器,使用GPIO 32和33连接
encoders[1].init(1, 26, 25); // 初始化第二个编码器,使用GPIO 26和25连接
// 3.让电机1以最大速度转起来
pinMode(23, OUTPUT);
digitalWrite(23, HIGH);
}
void loop()
{
delay(10); // 等待10毫秒
// 4.计算两个电机的速度
uint64_t dt = millis() - last_update_time; // 计算两次读取之间的时间差
pt[0] = encoders[0].getTicks() - last_ticks[0]; // 计算第一个编码器两次读取之间的计数器差值
pt[1] = encoders[1].getTicks() - last_ticks[1]; // 计算第二个编码器两次读取之间的计数器差值
speeds[0] = float(pt[0] * 0.1051566) / dt; // 计算第一个电机的速度
speeds[1] = float(pt[1] * 0.1051566) / dt; // 计算第二个电机的速度
// 5.更新记录
last_update_time = millis(); // 更新上一次更新时间
last_ticks[0] = encoders[0].getTicks(); // 更新第一个编码器的计数器数值
last_ticks[1] = encoders[1].getTicks(); // 更新第二个编码器的计数器数值
// 6.打印信息
Serial.printf("tick1=%d,tick2=%d\n", encoders[0].getTicks(), encoders[1].getTicks()); // 打印两个编码器的计数器数值
Serial.printf("spped1=%f,spped2=%f\n", speeds[0], speeds[1]); // 打印两个电机的速度
}
在loop()函数中,首先等待10毫秒,然后读取两个编码器的计数器数值,并且计算出它们的旋转速度。
其中,last_ticks数组用于存储上一次读取的计数器数值,pt数组存储两次读取之间的计数器增量,last_update_time变量存储上一次读取的时间,speeds数组存储两个编码器的旋转速度。
最后,通过串口打印出两个编码器的计数器数值和旋转速度。此外,还让GPIO 23输出高电平,使电机1以最大速度转动。
三、下载测试
下载代码,观察串口打印
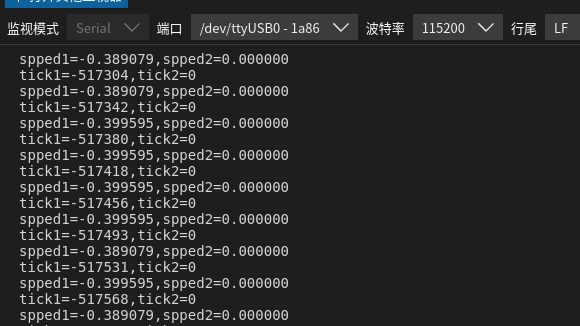
最大速度为-0.389079m/s。
四、总结
本节我们完成了对电机速度的测量,下一节我们尝试利用PID动态的控制电机保持在某个转速。