datetime:2024/08/26 15:55
author:nzb
T形速度曲线规划
import matplotlib.pyplot as plt
import numpy as np
class TCurvePlanner:
def __init__(self, q0: np.ndarray, q1: np.ndarray, vmax: np.ndarray, amax: np.ndarray) -> None:
super().__init__()
self._q0 = np.array(q0)
self._q1 = np.array(q1)
self._delta_q = self._q1 - self._q0
# 可能会除以0
# self.vmax_hat = np.min(np.abs(vmax / (self._q1 - self._q0)))
# self.amax_hat = np.min(np.abs(amax / (self._q1 - self._q0)))
# 第二种方法,可以避免除0
# vmax / delta_q 取最小值, 反过来,delta_q / vmax 取最大值
# 比如: 1 / [2,3,4] 取到 1/4, 反过来,[2,3,4] / 1 取到 4
self.vmax_hat = 1 / np.max(np.abs((self._q1 - self._q0) / vmax)) # 最大速度的调整系数。
self.amax_hat = 1 / np.max(np.abs((self._q1 - self._q0) / amax)) # 最大加速度的调整系数。
self._ta = self.vmax_hat / self.amax_hat # 加速时间。
self._pa = 0.5 * self.amax_hat * np.power(self._ta, 2) # 加速阶段的位置。
self._tm = (1 - 2 * self._pa) / self.vmax_hat # 匀速时间。
self._tf = self._tm + 2 * self._ta # 总时间。
if self._tf - 2 * self._ta < 0: # 如果总时间减去两倍加速时间小于零
# 如果总时间减去两倍加速时间小于零,这表明原来的加速时间设置不合理或无法实现。
self._ta = np.sqrt(1 / self.amax_hat) # 将最大加速度的调整系数取倒数
self._tf = 2 * self._ta
@property
def tf(self) -> float:
return self._tf
def get_tf(self) -> float:
return self._tf
def interpolate(self, t: float) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
p = 0.0
v = 0.0
a = 0.0
if t <= 0.0:
p = 0.0
v = 0.0
a = 0.0
elif t <= self._ta:
p = 0.5 * self.amax_hat * np.power(t, 2)
v = self.amax_hat * t
a = self.amax_hat
elif t < self.tf - self._ta:
p = 0.5 * self.amax_hat * np.power(self._ta, 2) + self.vmax_hat * (t - self._ta)
v = self.vmax_hat
a = 0.0
elif t <= self._tf:
p = 1 - 0.5 * self.amax_hat * np.power(self._tf - t, 2)
v = self.amax_hat * (self._tf - t)
a = -self.amax_hat
else:
p = 1
v = 0
a = 0
return self._q0 + p * self._delta_q, v * self._delta_q, a * self._delta_q
if __name__ == "__main__":
q0 = np.array([0, 0, 0, 0, 0, 0])
q1 = np.array([1, 2, 3, 4, 5, 0])
vmax = np.array([3, 3, 3, 5, 5, 5])
amax = np.array([9, 9, 9, 25, 25, 25])
planner = TCurvePlanner(q0, q1, vmax, amax)
tf = planner.tf
times = np.arange(0, np.ceil(tf), 0.001)
qs = np.zeros((times.size, q0.size))
dqs = np.zeros_like(qs)
ddqs = np.zeros_like(qs)
for i, t in enumerate(times):
qs[i, :], dqs[i, :], ddqs[i, :] = planner.interpolate(t)
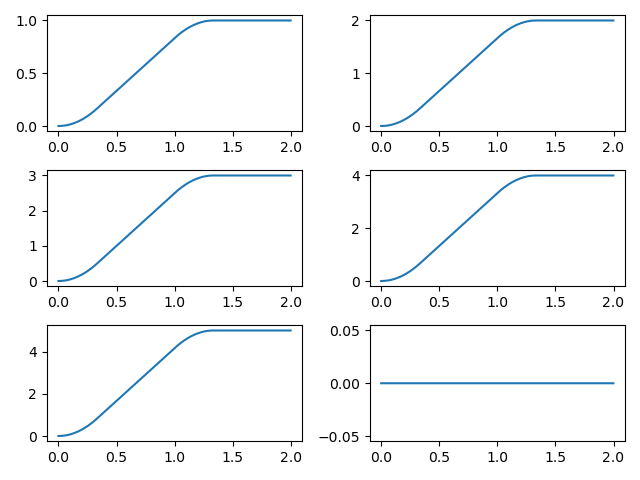
plt.figure(1)
for i in range(6):
plt.subplot(3, 2, i + 1)
plt.plot(times, qs[:, i])
plt.tight_layout()
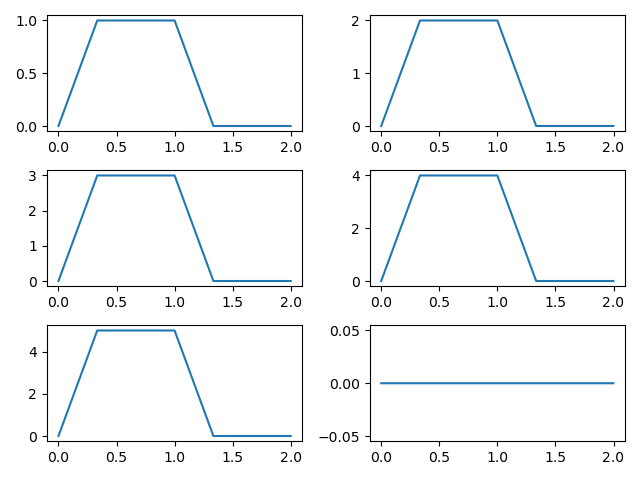
plt.figure(2)
for i in range(6):
plt.subplot(3, 2, i + 1)
plt.plot(times, dqs[:, i])
plt.tight_layout()
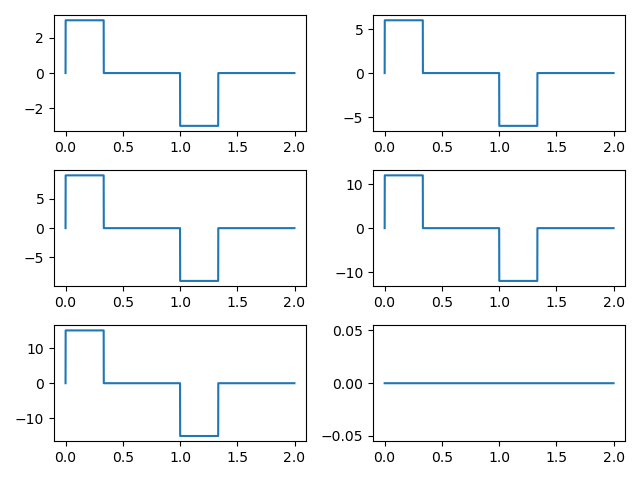
plt.figure(3)
for i in range(6):
plt.subplot(3, 2, i + 1)
plt.plot(times, ddqs[:, i])
plt.tight_layout()
plt.show()
位置
速度
加速度
问题排查
比如6个电机配置了vmax = np.array([3, 3, 3, 5, 5, 5])和amax = np.array([9, 9, 9, 25, 25, 25]),
使用lcm-spy查看6个电机的速度曲线,发现某些电机的匀速速度跟配置的vmax不一致。观察发现其中某个电机能达到配置的vmax,那么就是该电机配置的vmax过小,导致其他电机只能达到该电机配置的vmax值,过早以该电机配置值匀速运动,需要增大该电机vmax,这样会使其他电机继续加速,可能会出现匀速过程,也可能只会出现匀速减速过程。