datetime:2025/12/27 12:51
author:nzb
该项目来源于mujoco_learning
actuator
*actuator 节点包含在 mujoco 节点中*这是 mujoco中运动控制的节点,在这里指定驱动器,给机器人加入肌肉。
general 通用驱动器
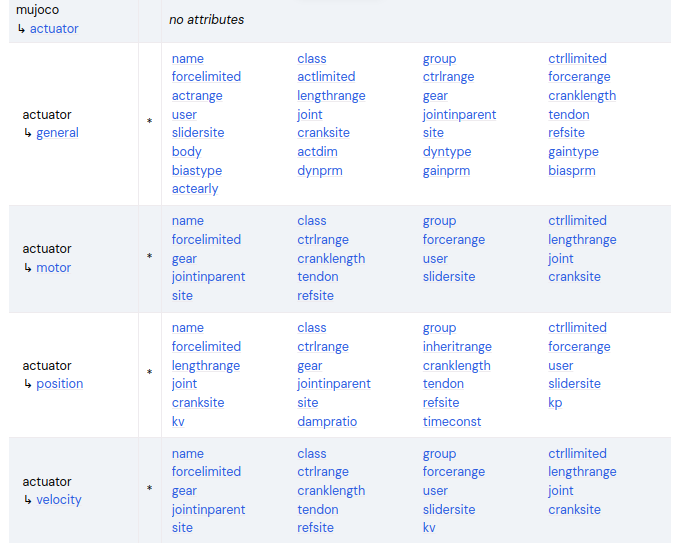
general 驱动器类似编程语言中的父对象,后面很多驱动器继承该驱动器的属性,建模的时候不要使用该驱动器。name,class,group
ctrllimited=[false/true/auto]
控制限制,指对驱动器输入值限制,默认 auto, auto 和 true 下面的ctrlrange就生效
ctrlrange="0 0"
控制范围
forcelimited==[false/true/auto] ,同上
驱动器输出力范围
forcerange="0 0"
力范围
actlimited==[false/true/auto] ,同上
驱动器活动范围
actrange="0 0"
活动范围,如平面关节为角度范围,默认单位按照设置单位lengthrange="0 0"
活动长度范围,模拟肌肉用到的
cranklength="0"
用于滑块曲柄,设置连杆长度,先建立连杆结构的几何体,之后直接将组合几何体给到 cranksite
cranksite="string"
指定曲柄滑块机构
gear="100000"
对力进行缩放第一个参数有效,其余是joint、 jointinparent和site用的,先不用管
tendon="string"
肌腱,抽象控制器组合,比如双轮同时控制,多个控制器合成一控制输入
dynprm,gainprm,biasprm
这些参数都是任意数量
激活动态参数,表现为阻尼或者响应
增益参数,表现为映射或者缩放
偏置参数,零点偏置
motor 驱动器
扭矩控制器,和电机差不多,相当于通用驱动器如下设置:
| Attribute | Setting | Attribute | Setting |
|---|---|---|---|
| dyntype | none | dynprm | 1 0 0 |
| gaintype | fixed | gainprm | 1 0 0 |
| biastype | none | biasprm | 0 0 0 |
其他属性继承通用驱动器
*演示:*<motorjoint="joint"name="Torque"/>
<general joint="joint" name="Torque" ctrlrange="-1 1" dynprm="1 0 0" gainprm="1 0 0" biasprm="0 0 0"/>
position 驱动器
位置控制伺服,相当于通用的
| Attribute | Setting | Attribute | Setting |
|---|---|---|---|
| dyntype | none or filterexact | dynprm | timeconst 0 0 |
| gaintype | fixed | gainprm | kp 0 0 |
| biastype | affine | biasprm | 0 -kp -kv |
kp=" 0 "(反馈增益,比例,相当于输入*kp)
kv=" 0 "
阻尼,使用这个建议 option中积分器改成 implicitfast或者implicit
dampratio=" 0 "
阻尼比,加了阻尼才能加这个,计算方式为 2 √(kp*m),值为 1 对应于临界阻尼振荡器,该振荡器通常会产生理想的行为。小于或大于 1 的值分别对应于欠阻尼和过阻尼振荡。小于或大于 1 的值分别对应于欠阻尼和过阻尼振荡
timeconst=" 0 "
大于 0 为一阶滤波器时间常数,等 于 0 不使用滤波器)。inheritrange(看文档)。
*演示:*<position joint="joint" name="pos" kp="2" kv="0.1"/>
inheritrange:
| inheritrange | ctrlrange |
|---|---|
| 0 | 手动设置 |
| 1.0 | 和限制的range一致 |
| <1.0 | 大于限制 |
| >1.0 | 小于限制 |
非0/1.0时计算公式:

<position joint="joint" name="pos" kp="2" kv="0.1" />
velocity 驱动器
速度伺服控制,等效通用驱动器:
| Attribute | Setting | Attribute | Setting |
|---|---|---|---|
| dyntype | none | dynprm | 1 0 0 |
| gaintype | fixed | gainprm | kv 0 0 |
| biastype | affine | biasprm | 0 0 -kv |
kv(速度增益)
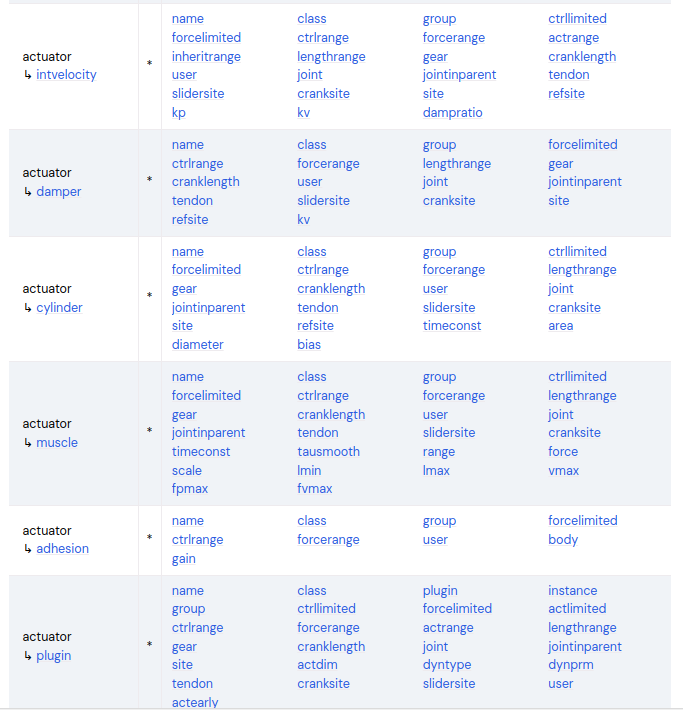
intvelocity 驱动器
积分速度伺服:
| Attribute | Setting | Attribute | Setting |
|---|---|---|---|
| dyntype | integrator | dynprm | 1 0 0 |
| gaintype | fixed | gainprm | kp 0 0 |
| biastype | affine | biasprm | 0 -kp -kv |
| actlimited | true | - |
这里 kp变成速度增益了,kv变为积分。 inheritrange同上position
damper 驱动器
产生与速度和控制正比的力,建议开建议 option中积分器 implicitfast或者 implicit, F=-kvvelocitycontrol,等效:
| Attribute | Setting | Attribute | Setting |
|---|---|---|---|
| dyntype | none | dynprm | 1 0 0 |
| gaintype | affine | gainprm | 0 0 -kv |
| biastype | none | biasprm | 0 0 0 |
| ctrllimited | true | - |
cylinder 驱动器
气缸和液缸模拟:
| Attribute | Setting | Attribute | Setting |
|---|---|---|---|
| dyntype | filter | dynprm | timeconst 0 0 |
| gaintype | fixed | gainprm | area 0 0 |
| biastype | affine | biasprm | bias(3) |
timeconst=" 1 "(时间常数) area=" 1 "(圆柱体面积,输出增益) diameter=""(指定为直径,比面积优先) bias=" 000 "(偏置)
*演示:*<actuator>
<position joint="rfd" name="rfdp" kp="2" kv="0.1"/>
<motor joint="rfa" name="rfav"/>
</actuator>
<?xml version="1.0" encoding="utf-8"?>
<mujoco model="inverted_pendulum">
<compiler angle="radian" meshdir="meshes" autolimits="true" />
<option timestep="0.002" gravity="0 0 -9.81" wind="0 0 0" integrator="implicitfast"
density="1.225"
viscosity="1.8e-5" />
<visual>
<global realtime="1" />
<quality shadowsize="16384" numslices="28" offsamples="4" />
<headlight diffuse="1 1 1" specular="0.5 0.5 0.5" active="1" />
<rgba fog="1 0 0 1" haze="1 1 1 1" />
</visual>
<asset>
<texture type="skybox" file="../asset/desert.png"
gridsize="3 4" gridlayout=".U..LFRB.D.." />
<texture name="plane" type="2d" builtin="checker" rgb1=".1 .1 .1" rgb2=".9 .9 .9"
width="512" height="512" mark="cross" markrgb=".8 .8 .8" />
<material name="plane" reflectance="0.3" texture="plane" texrepeat="1 1" texuniform="true" />
<material name="box" rgba="0 0.5 0 1" emission="0" />
</asset>
<default>
<geom solref=".5e-4" solimp="0.9 0.99 1e-4" fluidcoef="0.5 0.25 0.5 2.0 1.0" />
<default class="card">
<geom type="mesh" mesh="card" mass="1.84e-4" fluidshape="ellipsoid" contype="0"
conaffinity="0" />
</default>
<default class="collision">
<geom type="box" mass="0" size="0.047 0.032 .00035" group="3" friction=".1" />
</default>
</default>
<worldbody>
<geom name="floor" pos="0 0 0" size="10 10 .1" type="plane" material="plane"
condim="3" />
<light directional="true" ambient=".3 .3 .3" pos="30 30 30" dir="0 -2 -1"
diffuse=".5 .5 .5" specular=".5 .5 .5" />
<!-- 支撑柱 -->
<body name="support" pos="0 0 0.1">
<geom type="cylinder" mass="100" size="0.05 0.5" rgba="0.2 0.2 0.2 1" />
<!-- 水平杆 -->
<body name="rotay_am" pos="0 0 0.51">
<joint type="hinge" name="pivot" pos="0 0 0" axis="0 0 1" damping="0.001"
frictionloss="0.0"/>
<geom type="capsule" mass="0.01" fromto="0 0 0 0.2 0 0" size="0.01"
rgba="0.8 0.2 0.2 0.5" />
<!-- 摆 -->
<body name="pendulum" pos="0.2 0 0">
<joint type="hinge" name="ph" pos="0 0 0" axis="1 0 0" damping="0.001"
frictionloss="0.0" />
<geom type="capsule" mass="0.005" fromto="0 0 0 0 0 -0.3" size="0.01"
rgba="0.8 0.2 0.2 1" />
<!-- 配重 -->
<geom type="sphere" mass="0.01" size="0.03" pos="0 0 -0.3" rgba="0.2 0.8 0.2 1" />
</body>
</body>
</body>
</worldbody>
<actuator>
<!-- <motor name="pivot" joint="pivot" ctrlrange="-5 5" forcerange="-0.1 0.1" /> -->
<!-- <motor name="ph" joint="ph"/> -->
<position kp="2" kv="0.1" name="pivot" joint="pivot" ctrlrange="-3.14 3.14" forcerange="-5 5" />
<intvelocity name="ph" joint="ph" kp="100" kv="2" actrange="-1 1"/>
</actuator>
</mujoco>