datetime:2023/02/06 16:30
author:nzb
Windows安装rospy
ros 相关包下载链接,官方链接 ,采用轮子方法安装
安装依赖顺序
1、catkin
2、roslib
3、genmsg(roscpp依赖)
4、genpy(roscpp依赖)
5、roscpp(rospy依赖)
6、std_msgs(rospy依赖)
7、rosgraph_msgs(rospy依赖)
8、rosgraph(rospy依赖)
9、rospy
10、rosmaster
设置系统环境变量
ROS_LOG_DIR=C:\Users\lenovo\.ros\log# 日志路径ROS_MASTER_URI=http://172.31.242.34:11311/# master uriROS_ROOT=C:\Users\lenovo\.ros# ros 根目录
修改环境变量后需要重启IDE
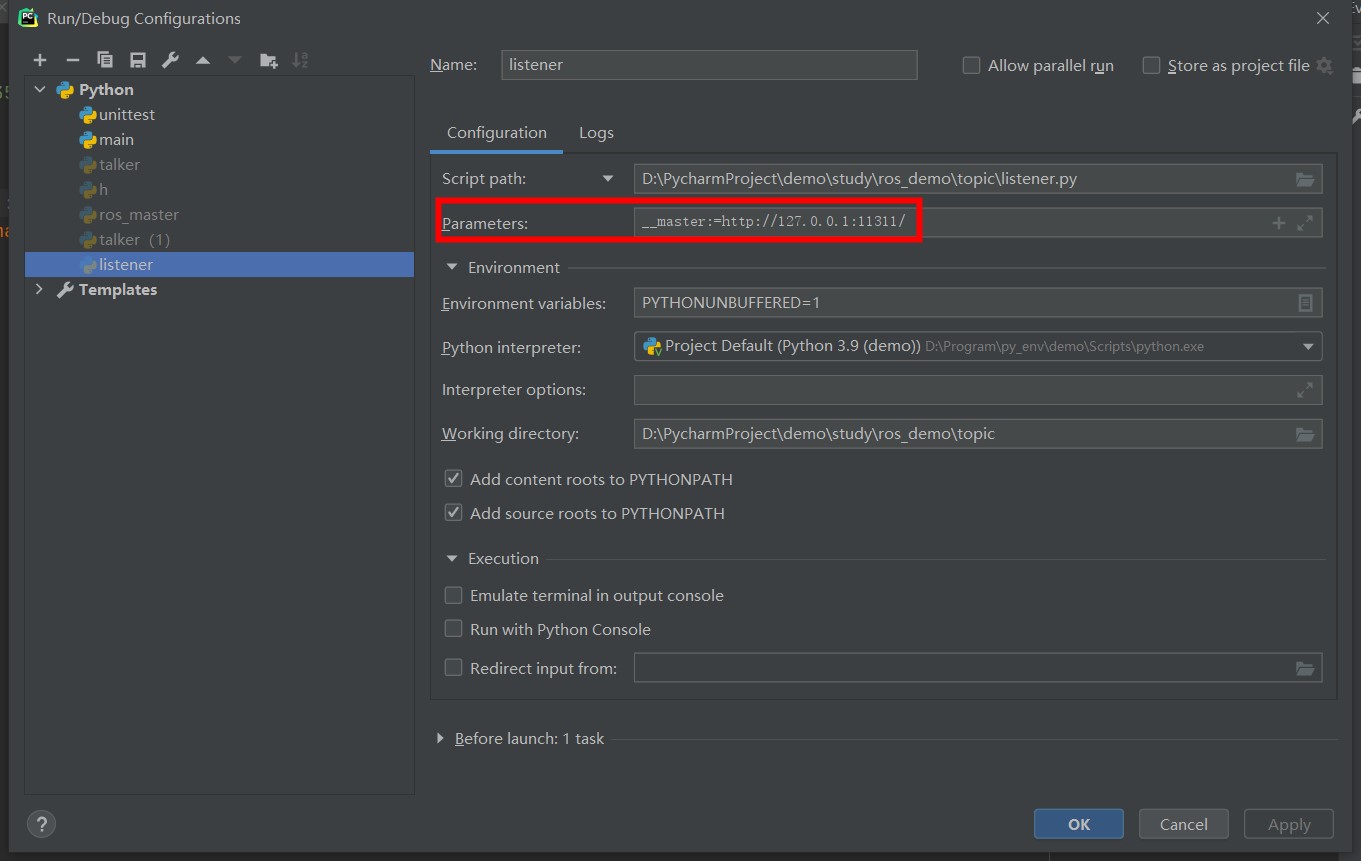
不改环境变量也可跑,需要配置执行参数
master.py
import rosmaster
if __name__ == '__main__':
rosmaster.rosmaster_main(["--core"])
配置运行参数,该处未配置才会取系统环境变量的
日志配置
目录:ROS_ROOT目录下建立config目录,里面新建python_logging.conf
配置文件,配置文件配置说明官方链接
# -*- encoding: utf8 -*-
[loggers]
keys = root, fileLogger, rotatingFileLogger
[handlers]
keys = consoleHandler, fileHandler, rotatingFileHandler
[formatters]
keys = simpleFormatter
[logger_root]
level = DEBUG
handlers = consoleHandler, fileHandler
[logger_fileLogger]
level = DEBUG
handlers = fileHandler
qualname = fileLogger
propagate = 0
[logger_rotatingFileLogger]
level = DEBUG
handlers = consoleHandler, rotatingFileHandler
qualname = rotatingFileLogger
propagate = 0
[handler_consoleHandler]
class = StreamHandler
level = DEBUG
formatter = simpleFormatter
args = (sys.stdout, )
[handler_fileHandler]
class = FileHandler
level = DEBUG
formatter = simpleFormatter
args = ('C:/Users/lenovo/.ros/log/logging.log', 'a')
[handler_rotatingFileHandler]
class = handlers.RotatingFileHandler
level = WARNING
formatter = simpleFormatter
args = ("C:/Users/lenovo/.ros/log/rotating_logging.log", "a", 1*1024*1024, 5)
[formatter_simpleFormatter]
#format=%(asctime)s - %(name)s - %(levelname)s - %(message)s
format = %(asctime)s - %(module)s - %(thread)d - %(levelname)s:%(message)s
datefmt = %Y-%m-%d %H:%M:%S