datetime:2023/09/15 16:38
author:nzb
该项目来源于大佬的动手学ROS2
Rviz显示不出数据了!一文搞懂Qos
ROS2的通信中间件换成了DDS。这让我们可以精准地控制节点间的通信质量。通信效率也迎来了一次大的提升。
但是...
但是...
一个不小心,看到了类似这样的报错信息:
[WARN] [1644578813.965216245] [subscriber_qos_obj]: New publisher discovered on topic '/qos_test', offering incompatible QoS. No messages will be received from it. Last incompatible policy: RELIABILITY
本来好好的Rviz也显示不了雷达数据了。
这就是incompatible QoS搞的鬼!
两个节点的Qos设置不兼容将没法通信
那什么是Qos(Quality of Service)
在ROS1中,节点间的通信是基于TCP的。因为TCP的失败重传机制,在一些网络不稳定的场景,通信会出现延时严重的问题。这大大限制了ROS1的使用场景。
在ROS2中,采用DDS作为通信中间件。ROS2的DDS中间件是可以配置成不同厂家提供的。这些不同的DDS各自有不同的侧重点,可根据项目的不同需求来选择。ROS2 Galactic和Rolling
默认采用rmw_cyclonedds_cpp。rmw_cyclonedds_cpp在进程间和多主机间通信的场景下,主要是使用UDP做为通信媒介。
通过正确的服务质量策略配置,ROS2可以像TCP一样可靠,也可以像UDP那样尽力而为。在不稳定的网络环境下,“尽力而为”策略将更合适。在实时性要求高的场景下,设定数据的有效性将是必须的。
针对节点特定的工作负载和使用场景,有倾向地配置Qos将可以使通信质量达到最佳。
我们可以为发布器、订阅器、提供服务的服务器和客户端配置QoS。
因为每个节点的Qos是可以单独配置的,所以如果配置的Qos互相不兼容,节点间的通信将无法建立。
Qos(Quality of Service)有哪些配置项
配置项目
History
- Keep last: 只缓存最新的N个数据,N可通过Depth的Queue size配置。
- Keep all: 缓存所有的数据,但是受限于DDS底层的资源限制。
Depth
- Queue size: 当History设置为Keep last时有效。
QoS & QoS::keep_last(size_t depth) { rmw_qos_profile_.history = RMW_QOS_POLICY_HISTORY_KEEP_LAST; rmw_qos_profile_.depth = depth; return *this; }Reliability
- Best effort: 尽力传送数据,但是网络不稳定可能会丢弃一些数据。
- Reliable: 确保数据被传送到,可能会重传多次,导致数据延时严重。
Durability
- Transient local: 为后订阅话题的订阅者保留数据,比如map_server发布map的Qos策略。
- Volatile: 不为后订阅话题的订阅者保留数据,比如订阅传感器数据的节点。
// Create a publisher using the QoS settings to emulate a ROS1 latched topic occ_pub_ = create_publisher<nav_msgs::msg::OccupancyGrid>( topic_name, rclcpp::QoS(rclcpp::KeepLast(1)).transient_local().reliable());Deadline
- Duration: 设置数据被发布的间隔时间。比如:像cmd_vel等控制命令就希望是固定间隔时间下发的。
- Lifespan
- Duration: 设置数据从发布到被接收的最大间隔时间。超过该时间将被认为是过时的数据,直接丢弃了。这对于传感器数据来说是很重要的。因为过时的传感器数据毫无用处。
- Liveliness
- Automatic: 一个节点可能有多个发布器。只要有一个发布器发布了数据,系统将认为该节点的所有发布器在接下来的lease duration时间段内是活跃的。
- Manual by topic: 如果手动确认发布器仍然是活跃的,系统将认为该发布器在接下来的lease duration时间段内是活跃的。
- Lease Duration
- Duration: 在这个时间段内,发布器需发布数据,不然会被系统认为是停止工作了。该参数与Liveliness配合使用。
不兼容的Qos策略
知道了所有的Qos的配置项目后,哪些跟哪些配置是不兼容的呢?
这里有一张对比表帮助我们避免不兼容的Qos策略设置。
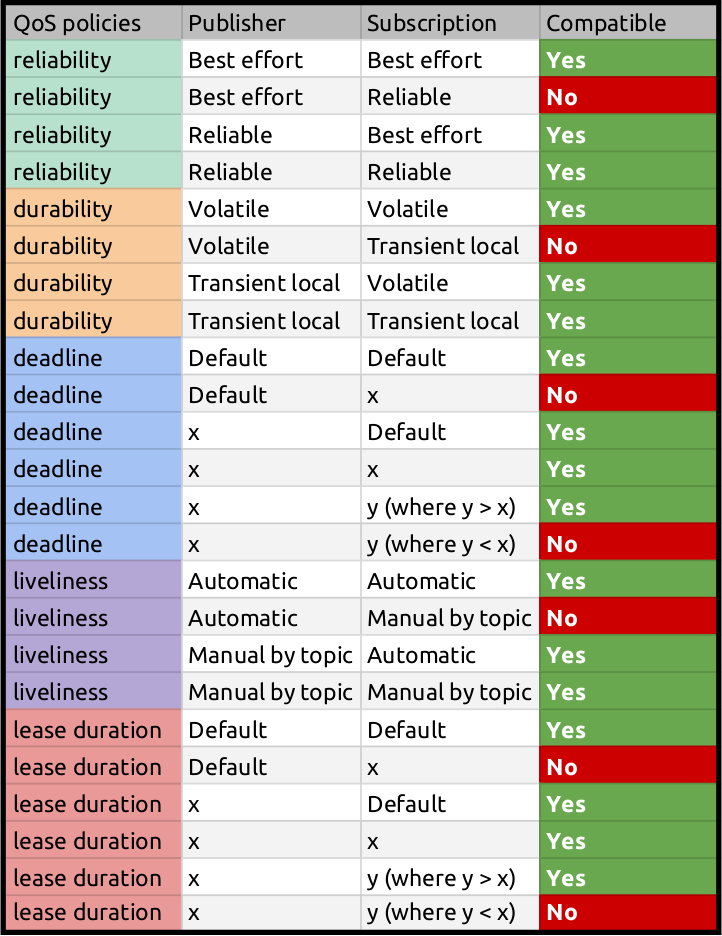
表中的x表示人为设定了某个值,Default值根据不同的DDS有不同的设定。通常是下面两种:
/// Constant representing an infinite duration. Use rmw_time_equal for comparisons.
/**
* Different RMW implementations have different representations for infinite durations.
* This value is reported for QoS policy durations that are left unspecified.
* Do not directly compare `sec == sec && nsec == nsec`, because we don't want to be sensitive
* to non-normalized values (nsec > 1 second) - use rmw_time_equal instead.
* This value is INT64_MAX nanoseconds = 0x7FFF FFFF FFFF FFFF = d 9 223 372 036 854 775 807
*
* Note: these constants cannot be `static const rmw_time_t` because in C that can't be used
* as a compile-time initializer
*/
#define RMW_DURATION_INFINITE {9223372036LL, 854775807LL}
#define RMW_DURATION_UNSPECIFIED {0LL, 0LL}
查询话题的Qos策略
用下面的命令查询
ros2 topic info /scan --verbose
输出示例
Type: sensor_msgs/msg/LaserScan
Publisher count: 1
Node name: laserscan
Node namespace: /
Topic type: sensor_msgs/msg/LaserScan
Endpoint type: PUBLISHER
GID: 71.03.10.01.8b.5b.f9.27.8e.9d.a4.4e.00.00.6c.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
Durability: VOLATILE
Lifespan: 9223372036854775807 nanoseconds
Deadline: 9223372036854775807 nanoseconds
Liveliness: AUTOMATIC
Liveliness lease duration: 9223372036854775807 nanoseconds
Subscription count: 0
分析一下:
Reliability = BEST_EFFORT. 这是在传感器节点中的标准设置方式。因为我们感兴趣的是获得大量的数据,如果丢失一两个信息,其实并不重要。Durability = Volatile. 这也是传感器节点的标准方式,特别是具有高数据量的传感器。我们并不需要为晚加入的节点保存旧的信息。因为旧信息对它根本没有意义了。Liveliness = Automatic. 这是默认的设置,特别是对于传感器。我们认为在lease duration时间段内,节点发布了任何话题,代表节点是活跃的。Deadline = "9223372036.854775807" seconds ( INFINITE VALUE ). 这意味着 没有Deadline限制.Lifespan = "9223372036.854775807" seconds( INFINITE VALUE ). 这意味着 没有数据有效性限制. 不管数据延时多久被接受到都认为其是有效。这是从gazebo中发出的数据。仿真环境下这么设置应该没啥关系。但在实际场景下则需要根据需求设置一下。
系统层预设的Qos
这里以rclcpp为例。
Qos配置的相关接口维护在rclcpp模块中的qos.cpp和qos.hpp文件中。/opt/ros/galactic/include/rmw/qos_profiles.h中维护了预设的Qos结构数据。
这里放置两个瞧瞧。
/**
* Sensor Data QoS class
* - History: Keep last,
* - Depth: 5,
* - Reliability: Best effort,
* - Durability: Volatile,
* - Deadline: Default,
* - Lifespan: Default,
* - Liveliness: System default,
* - Liveliness lease duration: default,
* - avoid ros namespace conventions: false
*/
static const rmw_qos_profile_t rmw_qos_profile_sensor_data =
{
RMW_QOS_POLICY_HISTORY_KEEP_LAST,
5,
RMW_QOS_POLICY_RELIABILITY_BEST_EFFORT,
RMW_QOS_POLICY_DURABILITY_VOLATILE,
RMW_QOS_DEADLINE_DEFAULT,
RMW_QOS_LIFESPAN_DEFAULT,
RMW_QOS_POLICY_LIVELINESS_SYSTEM_DEFAULT,
RMW_QOS_LIVELINESS_LEASE_DURATION_DEFAULT,
false
};
/**
* Parameters QoS class
* - History: Keep last,
* - Depth: 1000,
* - Reliability: Reliable,
* - Durability: Volatile,
* - Deadline: Default,
* - Lifespan: Default,
* - Liveliness: System default,
* - Liveliness lease duration: default,
* - Avoid ros namespace conventions: false
*/
static const rmw_qos_profile_t rmw_qos_profile_parameters =
{
RMW_QOS_POLICY_HISTORY_KEEP_LAST,
1000,
RMW_QOS_POLICY_RELIABILITY_RELIABLE,
RMW_QOS_POLICY_DURABILITY_VOLATILE,
RMW_QOS_DEADLINE_DEFAULT,
RMW_QOS_LIFESPAN_DEFAULT,
RMW_QOS_POLICY_LIVELINESS_SYSTEM_DEFAULT,
RMW_QOS_LIVELINESS_LEASE_DURATION_DEFAULT,
false
};
测试Qos的示例代码
这里简单说明一种Qos不兼容的情况。
先看订阅器的示例代码
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
# import Quality of Service library, to set the correct profile and reliability.
from rclpy.qos import ReliabilityPolicy, QoSProfile
class SubscriberQoS(Node):
def __init__(self):
super().__init__('subscriber_qos_obj')
# create the subscriber object
self.subscriber = self.create_subscription(
String,
'/qos_test',
self.listener_callback,
QoSProfile(depth=10, reliability=ReliabilityPolicy.RELIABLE))
def listener_callback(self, msg):
self.get_logger().info("Data Received =" + str(msg.data))
def main(args=None):
rclpy.init(args=args)
sub_qos_obj = SubscriberQoS()
rclpy.spin(sub_qos_obj)
sub_qos_obj.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
再看看发布器的代码
import argparse
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
from rclpy.qos_event import PublisherEventCallbacks
from rclpy.duration import Duration
from rclpy.qos import QoSProfile
from rclpy.qos import QoSDurabilityPolicy
from rclpy.qos import QoSLivelinessPolicy
from rclpy.qos import QoSReliabilityPolicy
class PublisherQoS(Node):
def __init__(self, qos_profile, node_name="publisher_qos_obj"):
super().__init__(node_name)
# create the publisher object
# create_publisher(msg_type, topic, qos_profile, *, callback_group=None, event_callbacks=None)
# INFO: https://docs.ros2.org/foxy/api/rclpy/api/node.html
rclpy.logging.set_logger_level(
node_name, rclpy.logging.LoggingSeverity.INFO)
event_callbacks = PublisherEventCallbacks(
incompatible_qos=self.incompatible_qos_clb)
self.publisher_ = self.create_publisher(msg_type=String,
topic='/qos_test',
qos_profile=qos_profile,
event_callbacks=event_callbacks)
# This is the Unique id for each of the messages that will be sent
self.msgs_id = 0
# self.current_time = self.get_clock().now()
self.current_time_s = 0
self.current_time_ns = 0
# define the timer period for 0.5 seconds
timer_period = 0.5
# create a timer sending two parameters:
# - the duration between 2 callbacks (0.5 seeconds)
# - the timer function (timer_callback)
self.timer = self.create_timer(timer_period, self.timer_callback)
def incompatible_qos_clb(self, event):
"""
This is the callback that will be executed when the Event of **Incompatible QoS** is
triggered.
"""
self.get_logger().error("A subscriber is asking for an INCOMPATIBLE QoS Triggered!!")
self.get_logger().error(str(event.last_policy_kind))
self.get_logger().error("############################")
def timer_callback(self):
# Here we have the callback method
msg = String()
test_time = self.get_clock().now()
self.current_time_s, self.current_time_ns = test_time.seconds_nanoseconds()
time_str = str(self.current_time_s) + "," + str(self.current_time_ns)
dds_msg_str = str(self.msgs_id) + ":" + time_str
msg.data = dds_msg_str
# Publish the message to the topic
self.publisher_.publish(msg)
# Display the message on the console
self.get_logger().info('Publishing: "%s"' % msg)
self.msgs_id += 1
def get_parser():
parser = argparse.ArgumentParser()
parser.add_argument(
'-reliability',
type=str,
choices=['best_effort', 'reliable'],
help='Select Policy for reliability, use ros2 run dds_tests_pkg publisher_dds_custom_qos_exe -reliability best_effort|reliable')
return parser
def main(args=None):
# Lets parse the arguments
parser = get_parser()
parsed_args = parser.parse_args()
# Configuration variables
reliability = parsed_args.reliability
print(reliability)
qos_profile_publisher = QoSProfile(depth=10)
# Options QoSDurabilityPolicy.VOLATILE, QoSDurabilityPolicy.TRANSIENT_LOCAL,
qos_profile_publisher.durability = QoSDurabilityPolicy.VOLATILE
qos_profile_publisher.deadline = Duration(seconds=2)
# Options QoSLivelinessPolicy.MANUAL_BY_TOPIC, QoSLivelinessPolicy.AUTOMATIC
qos_profile_publisher.liveliness = QoSLivelinessPolicy.AUTOMATIC
qos_profile_publisher.liveliness_lease_duration = Duration(seconds=2)
# Options: QoSReliabilityPolicy.RELIABLE, QoSReliabilityPolicy.BEST_EFFORT
if reliability == "reliable":
qos_profile_publisher.reliability = QoSReliabilityPolicy.RELIABLE
else:
qos_profile_publisher.reliability = QoSReliabilityPolicy.BEST_EFFORT
# initialize the ROS communication
rclpy.init(args=args)
# declare the node constructor
pub_qos_obj = PublisherQoS(qos_profile_publisher)
# pause the program execution, waits for a request to kill the node (ctrl+c)
rclpy.spin(pub_qos_obj)
# Explicity destroy the node
pub_qos_obj.destroy_node()
# shutdown the ROS communication
rclpy.shutdown()
if __name__ == '__main__':
main()
按照下面的方式启动能正常收发
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp #指定中间通信件
ros2 run qos_tests_pkg publisher_custom_minimal_qos_exe -reliability reliable
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp #指定中间通信件
ros2 run qos_tests_pkg subscriber_custom_minimal_qos_exe
两边命令窗口的打印均正常
发布命令窗口
reliable
[INFO] [1644578723.014033825] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='0:1644578722,985456932')"
[INFO] [1644578723.486186513] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='1:1644578723,485332074')"
[INFO] [1644578723.986142873] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='2:1644578723,985345254')"
[INFO] [1644578724.486645546] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='3:1644578724,485467771')"
[INFO] [1644578724.986427990] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='4:1644578724,985333069')"
[INFO] [1644578725.486563859] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='5:1644578725,485435341')"
[INFO] [1644578725.986608071] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='6:1644578725,985460097')"
[INFO] [1644578726.486474454] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='7:1644578726,485332301')"
[INFO] [1644578726.986147983] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='8:1644578726,985357784')"
接收命令窗口
[INFO] [1644578723.015739998] [subscriber_qos_obj]: Data Received =0:1644578722,985456932
[INFO] [1644578723.486751033] [subscriber_qos_obj]: Data Received =1:1644578723,485332074
[INFO] [1644578723.986497548] [subscriber_qos_obj]: Data Received =2:1644578723,985345254
[INFO] [1644578724.486954816] [subscriber_qos_obj]: Data Received =3:1644578724,485467771
[INFO] [1644578724.986790852] [subscriber_qos_obj]: Data Received =4:1644578724,985333069
[INFO] [1644578725.486864984] [subscriber_qos_obj]: Data Received =5:1644578725,485435341
[INFO] [1644578725.986921274] [subscriber_qos_obj]: Data Received =6:1644578725,985460097
[INFO] [1644578726.486804679] [subscriber_qos_obj]: Data Received =7:1644578726,485332301
[INFO] [1644578726.986422874] [subscriber_qos_obj]: Data Received =8:1644578726,985357784
按Qos不兼容的方式启动
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp #指定中间通信件
ros2 run qos_tests_pkg publisher_custom_minimal_qos_exe -reliability best_effort
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp #指定中间通信件
ros2 run qos_tests_pkg subscriber_custom_minimal_qos_exe
这时两边的命令窗口都将出现incompatible QoS等字符。
发布命令窗口
best_effort
[ERROR] [1644578813.964901713] [publisher_qos_obj]: A subscriber is asking for an INCOMPATIBLE QoS Triggered!!
[ERROR] [1644578813.965861273] [publisher_qos_obj]: rmw_qos_policy_kind_t.RMW_QOS_POLICY_RELIABILITY
[ERROR] [1644578813.966438368] [publisher_qos_obj]: ############################
[INFO] [1644578814.439657635] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='0:1644578814,438408983')"
[INFO] [1644578814.939157191] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='1:1644578814,938248853')"
[INFO] [1644578815.439442102] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='2:1644578815,438273310')"
[INFO] [1644578815.939210872] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='3:1644578815,938319227')"
[INFO] [1644578816.439078646] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='4:1644578816,438258510')"
[INFO] [1644578816.939358849] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='5:1644578816,938258582')"
[INFO] [1644578817.439420153] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='6:1644578817,438366411')"
[INFO] [1644578817.939196207] [publisher_qos_obj]: Publishing: "std_msgs.msg.String(data='7:1644578817,938358924')"
接收命令窗口
[WARN] [1644578813.965216245] [subscriber_qos_obj]: New publisher discovered on topic '/qos_test', offering incompatible QoS. No messages will be received from it. Last incompatible policy: RELIABILITY
原因是发布器和订阅器的Qos配置不兼容。
发布器:QoS Reliability=Best_Effort
订阅器:QoS Reliability=Reliable