datetime:2023/05/11 15:12
author:nzb
BT2:行为树的基本知识点
xml文件
行为树按照xml文件格式来设计、书写和保存,如BehaviorTree.CPP/examples/t03_generic_ports.cpp中这样定义了一棵行为树:
<root main_tree_to_execute = "MainTree" >
<BehaviorTree ID="MainTree">
<Sequence name="root">
<CalculateGoal goal="{GoalPosition}" />
<PrintTarget target="{GoalPosition}" />
<SetBlackboard output_key="OtherGoal" value="-1;3" />
<PrintTarget target="{OtherGoal}" />
</Sequence>
</BehaviorTree>
</root>
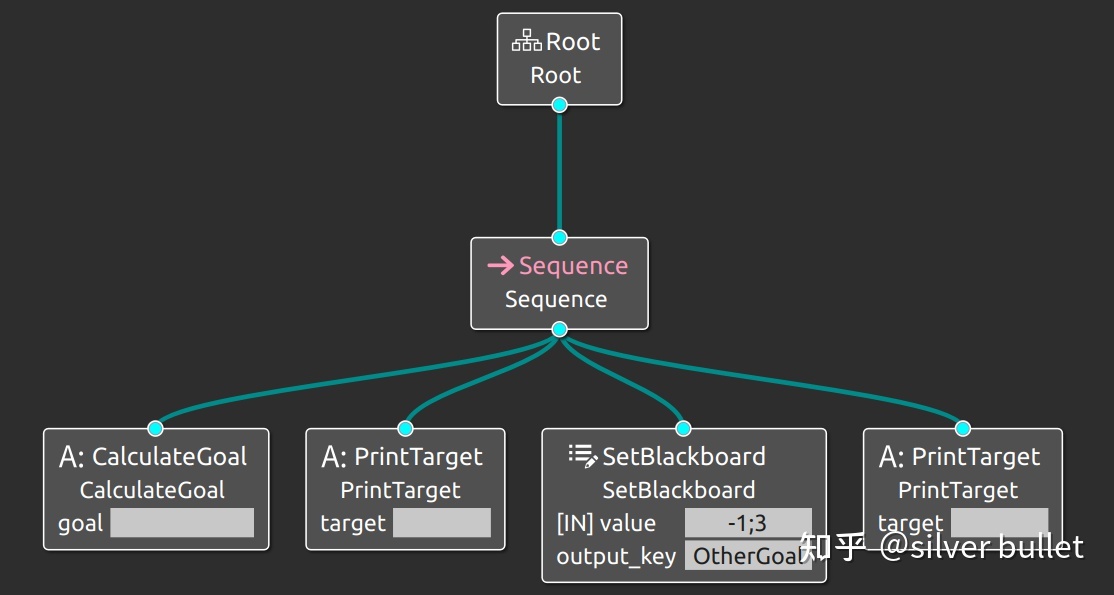
图形化后如下图,表示依次执行4个action node。
而定义行为树的xml文件使用createTreeFromText()或createTreeFromFile()加载进来。函数定义在BehaviorTree.CPP/include/behaviortree_cpp_v3/bt_factory.h,声明如下。这时会调用树中各nodes的构造函数。
Tree createTreeFromText(const std::string& text,
Blackboard::Ptr blackboard = Blackboard::create());
Tree createTreeFromFile(const std::string& file_path,
Blackboard::Ptr blackboard = Blackboard::create());
使用方法如下:
BehaviorTreeFactory factory;
auto tree = factory.createTreeFromText(xml_text);
tree.tickRoot();
tick()
类似于数据结构中“tree”的概念,行为树是控制任务执行流程的分层节点树。一个称为“ tick ”的信号,由开发者发送到树的根部并在树的节点中传播, 直到它到达树的底部——叶节点。接收到tick信号的节点会执行它的回调,即被设定的该节点的任务,然后向上返回执行的结果。在大多数开源库中, 该结果有且只有3种:成功完成SUCCESS,执行失败FAILURE,正在执行RUNNING。
节点种类
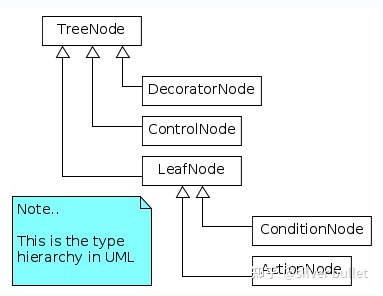
行为树主要有4种节点,其中的ControlNode和DecoratorNode常由库实现,而ConditionNode和ActionNode需开发者自行实现,即定义何种情况执行何种行为。
ControlNode:控制节点,有至少1个子节点,负责控制执行流程;可以细分成非常多的种类。DecoratorNode:装饰节点,有且仅有1个子节点,负责重复执行子节点,或更改子节点的返回结果。ConditionNode:条件节点,没有子节点,需要由开发者实现,不可以返回RUNNING,必须atomic and synchronous,负责任务执行的判断条件,不应该改变系统的状态。ActionNode:动作节点,没有子节点,需要由开发者实现,负责执行具体任务。有同步和异步之分。