datetime:2023/05/12 10:30
author:nzb
BT8:ActionNode及同步、异步
定义在BehaviorTree.CPP/include/behaviortree_cpp_v3/action_node.h,这个文件中定义了ActionNodeBase、SyncActionNode
、SimpleActionNode、AsyncActionNode、StatefulActionNode、CoroActionNode等类,开发者自己定义的action node一般都会继承其中一个基类。
ActionNodeBase
最通用的action node基类,子类要实现executeTick()、tick()、halt()等函数。
SyncActionNode
继承自ActionNodeBase,同步action node,不会返回RUNNING,无需开发者实现halt()。
NodeStatus SyncActionNode::executeTick() {
auto stat = ActionNodeBase::executeTick();
if (stat == NodeStatus::RUNNING) {
throw LogicError("SyncActionNode MUST never return RUNNING");
}
return stat;
}
virtual void halt() override final { setStatus(NodeStatus::IDLE); }
SimpleActionNode
继承自SyncActionNode,常使用lambdas或std::bind构造std::function对象来构造SimpleActionNode,这个function就是tick()的内容。
这样开发者无需定义node,只需指定node的类型ID和tick()即可,SimpleConditionNode同理。
class SimpleActionNode : public SyncActionNode {
public:
typedef std::function<NodeStatus(TreeNode&)> TickFunctor;
// You must provide the function to call when tick() is invoked
SimpleActionNode(const std::string& name, TickFunctor tick_functor,
const NodeConfiguration& config);
~SimpleActionNode() override = default;
protected:
virtual NodeStatus tick() override final;
TickFunctor tick_functor_; // tick()执行的内容
};
NodeStatus SimpleActionNode::tick() {
...
NodeStatus status = tick_functor_(*this);
if (status != prev_status) {
setStatus(status);
}
return status;
}
BehaviorTree.CPP/examples/t01_build_your_first_tree.cpp中有使用示例。
GripperInterface gripper;
// open()是GripperInterface类的成员函数
factory.registerSimpleAction("OpenGripper",
std::bind(&GripperInterface::open, &gripper));
register函数不会调用node的构造函数,其作用是向BehaviorTreeFactory注册类型,创建构造函数匹配的builder。
// 不需要输入config
void BehaviorTreeFactory::registerSimpleAction(
const std::string& ID, const SimpleActionNode::TickFunctor& tick_functor,
PortsList ports) {
NodeBuilder builder = [tick_functor, ID](const std::string& name,
const NodeConfiguration& config) {
return std::make_unique<SimpleActionNode>(name, tick_functor, config);
};
TreeNodeManifest manifest = {NodeType::ACTION, ID, std::move(ports)};
registerBuilder(manifest, builder);
}
void BehaviorTreeFactory::registerBuilder(const TreeNodeManifest& manifest,
const NodeBuilder& builder) {
auto it = builders_.find(manifest.registration_ID);
if (it != builders_.end()) {
throw BehaviorTreeException("ID [", manifest.registration_ID,
"] already registered");
}
builders_.insert({manifest.registration_ID, builder});
manifests_.insert({manifest.registration_ID, manifest});
}
AsyncActionNode
继承自ActionNodeBase,会在executeTick()函数中创建1个线程来执行tick(),通过halt_requested_变量监控节点是否被终止。 开发者需要在子类tick()
中周期性检查isHaltRequested()的返回值,以便及时终止执行。子类halt()要记得调用父类AsyncActionNode::halt()。 子类不必显式的返回RUNNING
,只需根据结果返回SUCCESS/FAILURE,未执行完成时会自动置位和返回RUNNING。
NodeStatus BT::AsyncActionNode::executeTick() {
// send signal to other thread.
// The other thread is in charge for changing the status
if (status() == NodeStatus::IDLE) {
setStatus(NodeStatus::RUNNING);
halt_requested_ = false;
thread_handle_ = std::async(std::launch::async, [this]() {
try {
setStatus(tick());
} catch (std::exception&) {
std::cerr << "\nUncaught exception from the method tick(): ["
<< registrationName() << "/" << name() << "]\n"
<< std::endl;
exptr_ = std::current_exception();
thread_handle_.wait();
}
return status();
});
}
if (exptr_) {
std::rethrow_exception(exptr_);
}
return status();
}
BehaviorTree.CPP/sample_nodes/movebase_node.h有AsyncActionNode的使用示例。
参考链接
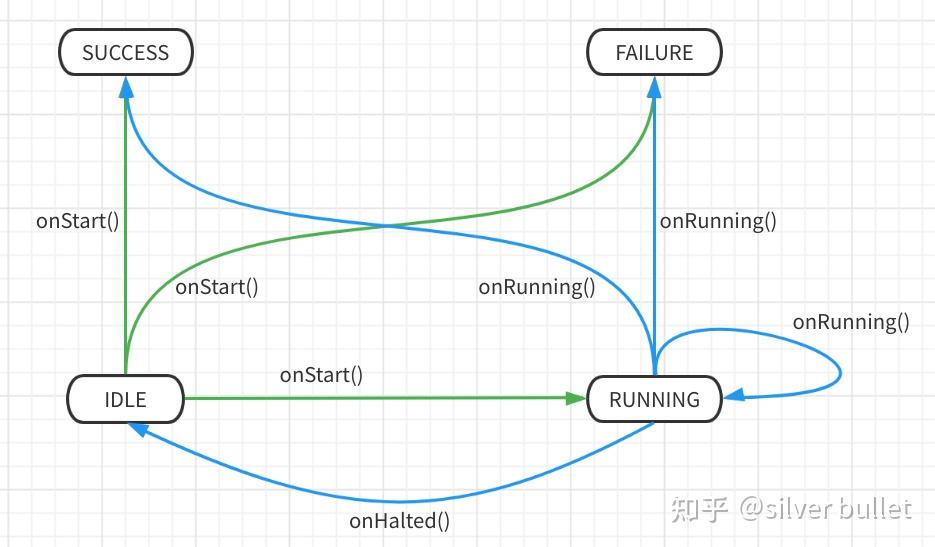
StatefulActionNode
继承自ActionNodeBase,像状态机的运行方式。如果节点在IDLE state就会调用onStart(),如果在RUNNING state就会调用onRunning(),如果被halt()
就会调用onHalted()。
class StatefulActionNode : public ActionNodeBase {
public:
StatefulActionNode(const std::string& name, const NodeConfiguration& config)
: ActionNodeBase(name, config) {}
// do not override this method
NodeStatus tick() override final;
// do not override this method
void halt() override final;
/// method to be called at the beginning.
/// If it returns RUNNING, this becomes an asychronous node.
virtual NodeStatus onStart() = 0;
/// method invoked by a RUNNING action.
virtual NodeStatus onRunning() = 0;
/// when the method halt() is called and the action is RUNNING, this method is
/// invoked. This is a convenient place todo a cleanup, if needed.
virtual void onHalted() = 0;
};
NodeStatus StatefulActionNode::tick() {
const NodeStatus initial_status = status(); // 当前状态
if (initial_status == NodeStatus::IDLE) {
NodeStatus new_status = onStart(); // 状态跳转
...
return new_status;
}
if (initial_status == NodeStatus::RUNNING) {
NodeStatus new_status = onRunning(); // 状态跳转
...
return new_status;
}
// 当前状态不是IDLE、RUNNING,那么就是SUCCESS/FAILURE,可以直接返回结果
return initial_status;
}
void StatefulActionNode::halt() {
if (status() == NodeStatus::RUNNING) {
onHalted(); // 状态跳转
}
setStatus(NodeStatus::IDLE);
}
CoroActionNode
理解不透,略。