datetime:2025/04/27 16:39
author:nzb
平行容器
平行容器将一系列阶段结合起来,以便规划备用解决方案。
MTC 提供的三个阶段可在平行容器中使用:
- Alternatives(替代方案)
- Fallback(备选方案)
- Merger(合并)
Alternatives
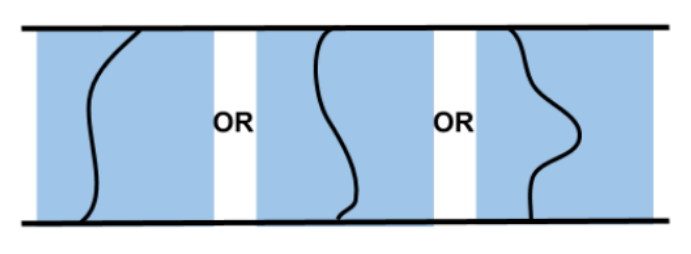
替代容器允许并行执行添加阶段。
所有子阶段的解决方案都会在最后收集起来,并按成本排序。
示例 - 规划一条有多个成本项的轨迹。
auto pipeline{ std::make_shared<solvers::PipelinePlanner>(node) };
auto alternatives{ std::make_unique<Alternatives>("connect") };
{
auto connect{ std::make_unique<stages::Connect>(
"path length", stages::Connect::GroupPlannerVector{ { "panda_arm", pipeline } }) };
connect->setCostTerm(std::make_unique<cost::PathLength>());
alternatives->add(std::move(connect));
}
{
auto connect{ std::make_unique<stages::Connect>(
"trajectory duration", stages::Connect::GroupPlannerVector{ { "panda_arm", pipeline } }) };
connect->setCostTerm(std::make_unique<cost::TrajectoryDuration>());
alternatives->add(std::move(connect));
}
t.add(std::move(alternatives));
Fallbacks
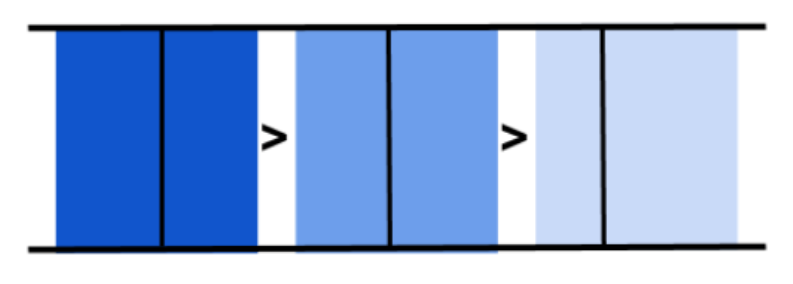
备选容器按顺序执行子阶段,直到其中一个阶段返回成功或所有阶段返回失败。
示例 - 每次使用不同的求解器进行规划,直到获得成功的解决方案。
auto cartesian = std::make_shared<solvers::CartesianPath>();
auto ptp = std::make_shared<solvers::PipelinePlanner>(node, "pilz_industrial_motion_planner", "PTP")
auto rrtconnect = std::make_shared<solvers::PipelinePlanner>(node, "ompl", "RRTConnectkConfigDefault")
// fallbacks to reach target_state
auto fallbacks = std::make_unique<Fallbacks>("move to other side");
auto add_to_fallbacks{ [&](auto& solver, auto& name) {
auto move_to = std::make_unique<stages::MoveTo>(name, solver);
move_to->setGroup("panda_arm");
move_to->setGoal(target_state);
fallbacks->add(std::move(move_to));
} };
add_to_fallbacks(cartesian, "Cartesian path");
add_to_fallbacks(ptp, "PTP path");
add_to_fallbacks(rrtconnect, "RRT path");
Merger
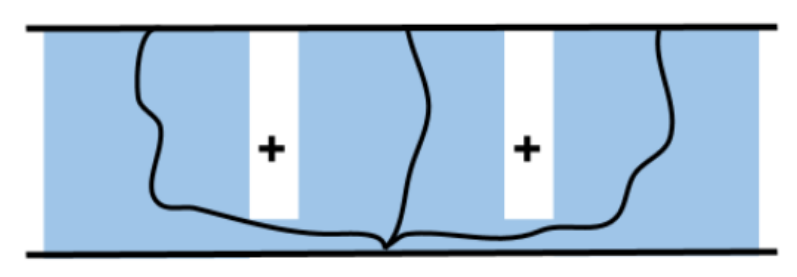
合并容器中的各阶段可合并多个不同的问题,即并行规划不同的规划组。
所有子阶段的解决方案都会合并为一个解决方案,以便并行执行。
示例 - 将机械臂移动到某一位置时打开夹具
auto cartesian_planner = std::make_shared<solvers::CartesianPath>();
const auto joint_interpolation_planner = std::make_shared<moveit::task_constructor::solvers::JointInterpolationPlanner>();
auto merger = std::make_unique<Merger>("move arm and close gripper");
auto move_relative = std::make_unique<moveit::task_constructor::stages::MoveRelative>("Approach", cartesian_planner);
merger->add(std::move(move_relative));
auto move_to =
std::make_unique<moveit::task_constructor::stages::MoveTo>("close gripper", joint_interpolation_planner);
merger->add(std::move(move_to));