datetime:2025/04/25 16:39
author:nzb
move_group 节点
下图展示了MoveIt核心节点move_group的系统架构。该节点作为集成器,将所有组件整合在一起,为用户提供一组ROS Action和Service接口。
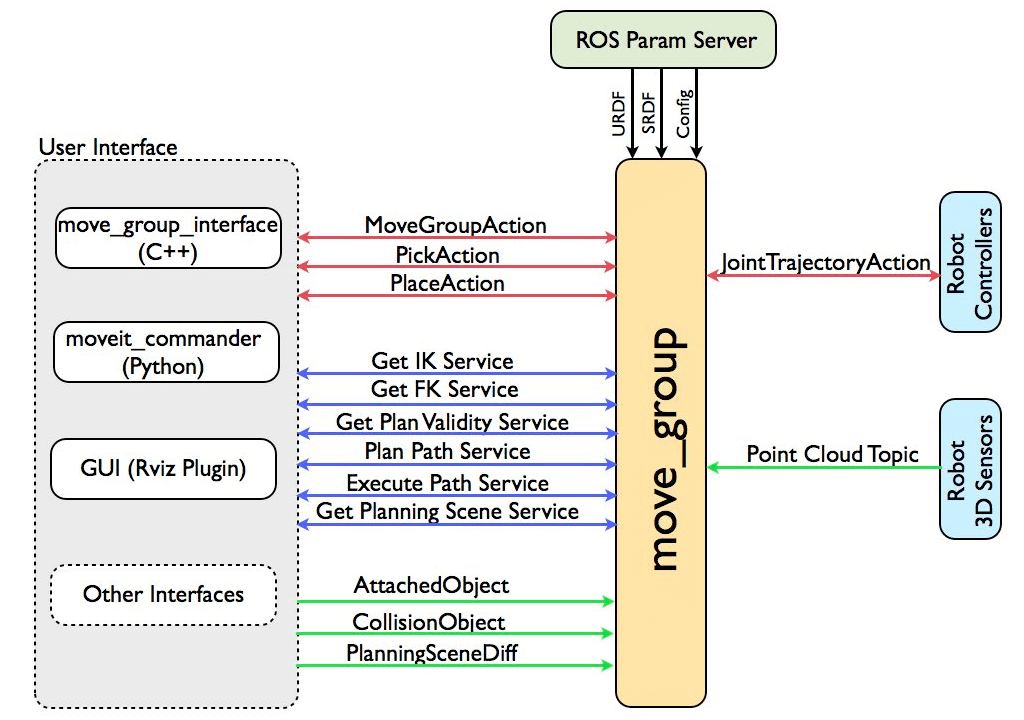
用户接口(User Interface)
用户可通过两种方式访问move_group的功能:
- C++接口:使用
move_group_interface包提供的C++接口。 - 图形界面:通过Rviz的Motion Planning插件(ROS可视化工具)。
配置(Configuration)
move_group作为ROS节点,通过ROS参数服务器获取三类信息:
- URDF:从
robot_description参数加载机器人URDF模型。 - SRDF:从
robot_description_semantic参数加载语义描述文件(SRDF),该文件通常由MoveIt Setup Assistant生成。 - MoveIt配置:加载关节限位、运动学、运动规划等配置文件(由
MoveIt Setup Assistant自动生成,存储于机器人配置包的config目录)。
机器人接口(Robot Interface)
move_group通过ROS话题和Action与机器人交互:
- 状态获取:监听
/joint_states话题获取关节位置(支持多发布者的部分状态信息,如机械臂与移动底盘分开发布)。 - 坐标变换:通过ROS TF库监听全局位姿信息(如导航栈发布的
map到base_link变换)。 - 控制接口:通过
FollowJointTrajectoryAction与机器人控制器通信(需机器人端部署Action服务端)。
注:
move_group不发布关节状态或TF信息,需依赖robot_state_publisher节点。- 控制器接口需用户自行实现Action服务端。
规划场景(Planning Scene)
move_group通过Planning Scene Monitor维护规划场景,包含:
- 环境模型
- 机器人当前状态(包括刚性附着物体)。
详细架构见后续“规划场景”章节。
可扩展能力(Extensible Capabilities)
move_group采用插件化设计,支持以下功能的灵活扩展:
- 抓取放置(Pick and Place)
- 运动学求解(Kinematics)
- 运动规划(Motion Planning)
插件通过ROS参数和pluginlib库配置,普通用户无需手动调整(MoveIt Setup Assistant生成的启动文件已自动配置)。