datetime:2025/01/10 14:45
author:nzb
该项目来源于mujoco_learning
可视化及渲染
可视化配置
mjtVisFlag对应mjvOption.flags中的设置,在simulate中对应如下配置
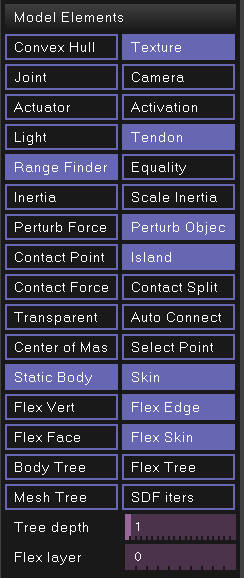
可以使用opt.flags[mjtVisFlag::mjVIS_XXX]=true开启功能
typedef enum mjtVisFlag_ { // flags enabling model element visualization
mjVIS_CONVEXHULL = 0, // mesh convex hull
mjVIS_TEXTURE, // textures
mjVIS_JOINT, // joints
mjVIS_CAMERA, // cameras
mjVIS_ACTUATOR, // actuators
mjVIS_ACTIVATION, // activations
mjVIS_LIGHT, // lights
mjVIS_TENDON, // tendons
mjVIS_RANGEFINDER, // rangefinder sensors
mjVIS_CONSTRAINT, // point constraints
mjVIS_INERTIA, // equivalent inertia boxes
mjVIS_SCLINERTIA, // scale equivalent inertia boxes with mass
mjVIS_PERTFORCE, // perturbation force
mjVIS_PERTOBJ, // perturbation object
mjVIS_CONTACTPOINT, // contact points
mjVIS_ISLAND, // constraint islands
mjVIS_CONTACTFORCE, // contact force
mjVIS_CONTACTSPLIT, // split contact force into normal and tangent
mjVIS_TRANSPARENT, // make dynamic geoms more transparent
mjVIS_AUTOCONNECT, // auto connect joints and body coms
mjVIS_COM, // center of mass
mjVIS_SELECT, // selection point
mjVIS_STATIC, // static bodies
mjVIS_SKIN, // skin
mjVIS_FLEXVERT, // flex vertices
mjVIS_FLEXEDGE, // flex edges
mjVIS_FLEXFACE, // flex element faces
mjVIS_FLEXSKIN, // flex smooth skin (disables the rest)
mjVIS_BODYBVH, // body bounding volume hierarchy
mjVIS_FLEXBVH, // flex bounding volume hierarchy
mjVIS_MESHBVH, // mesh bounding volume hierarchy
mjVIS_SDFITER, // iterations of SDF gradient descent
mjNVISFLAG // number of visualization flags
} mjtVisFlag;
mjvOption.label使用mjtLabel显示对应标签
mjvOption.frame使用mjtFrame显示对应坐标系
mjvOption中还可以设置分组的可视化和bvh树深度
完整定义:
struct mjvOption_ { // abstract visualization options
int label; // what objects to label (mjtLabel)
int frame; // which frame to show (mjtFrame)
mjtByte geomgroup[mjNGROUP]; // geom visualization by group
mjtByte sitegroup[mjNGROUP]; // site visualization by group
mjtByte jointgroup[mjNGROUP]; // joint visualization by group
mjtByte tendongroup[mjNGROUP]; // tendon visualization by group
mjtByte actuatorgroup[mjNGROUP]; // actuator visualization by group
mjtByte flexgroup[mjNGROUP]; // flex visualization by group
mjtByte skingroup[mjNGROUP]; // skin visualization by group
mjtByte flags[mjNVISFLAG]; // visualization flags (indexed by mjtVisFlag)
int bvh_depth; // depth of the bounding volume hierarchy to be visualized
int flex_layer; // element layer to be visualized for 3D flex
};
typedef struct mjvOption_ mjvOption;
场景渲染
mjtRndFlag作用于mjvScene.flags,对应simulate中如下配置
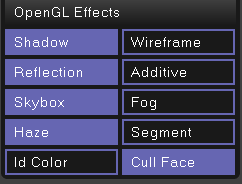
typedef enum mjtRndFlag_ { // flags enabling rendering effects
mjRND_SHADOW = 0, // shadows
mjRND_WIREFRAME, // wireframe
mjRND_REFLECTION, // reflections
mjRND_ADDITIVE, // additive transparency
mjRND_SKYBOX, // skybox
mjRND_FOG, // fog
mjRND_HAZE, // haze
mjRND_SEGMENT, // segmentation with random color
mjRND_IDCOLOR, // segmentation with segid+1 color
mjRND_CULL_FACE, // cull backward faces
mjNRNDFLAG // number of rendering flags
} mjtRndFlag;
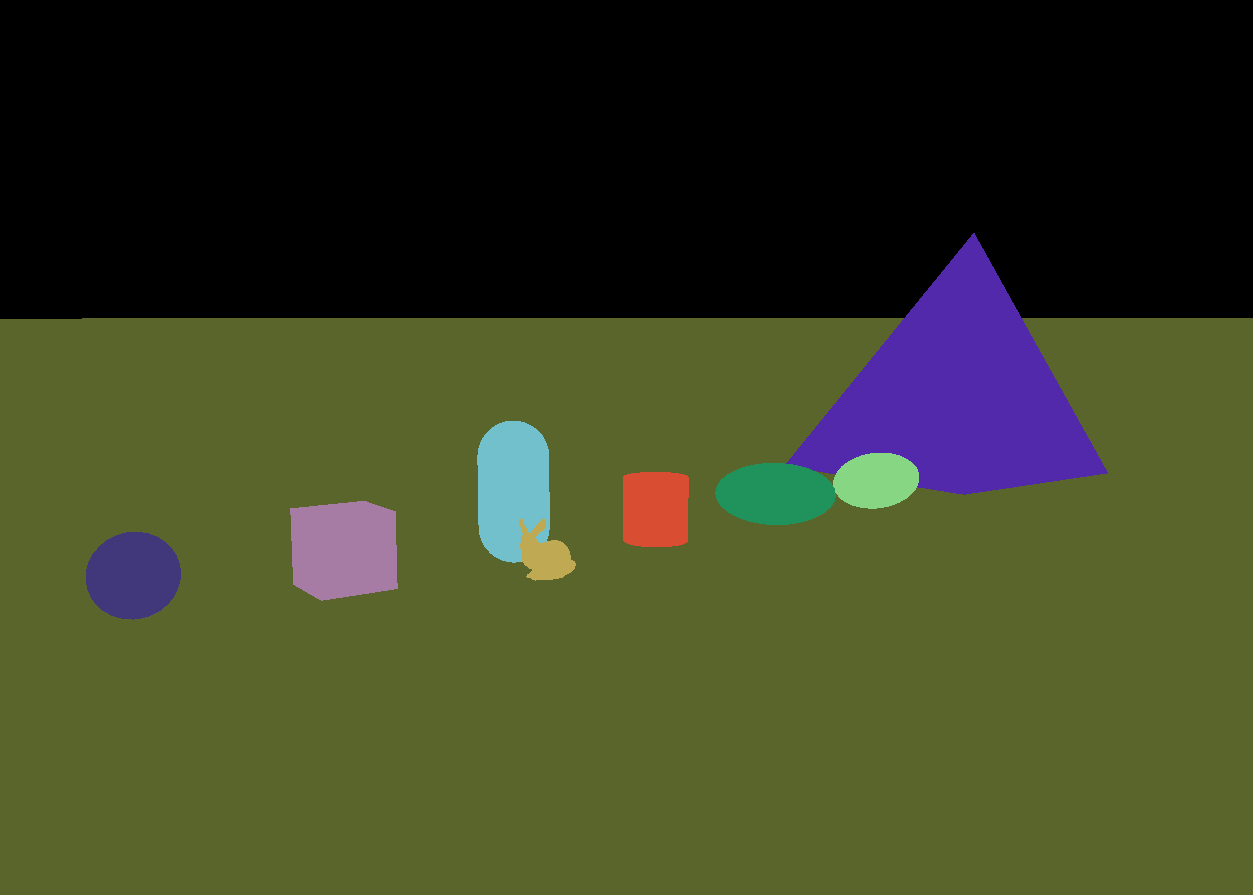
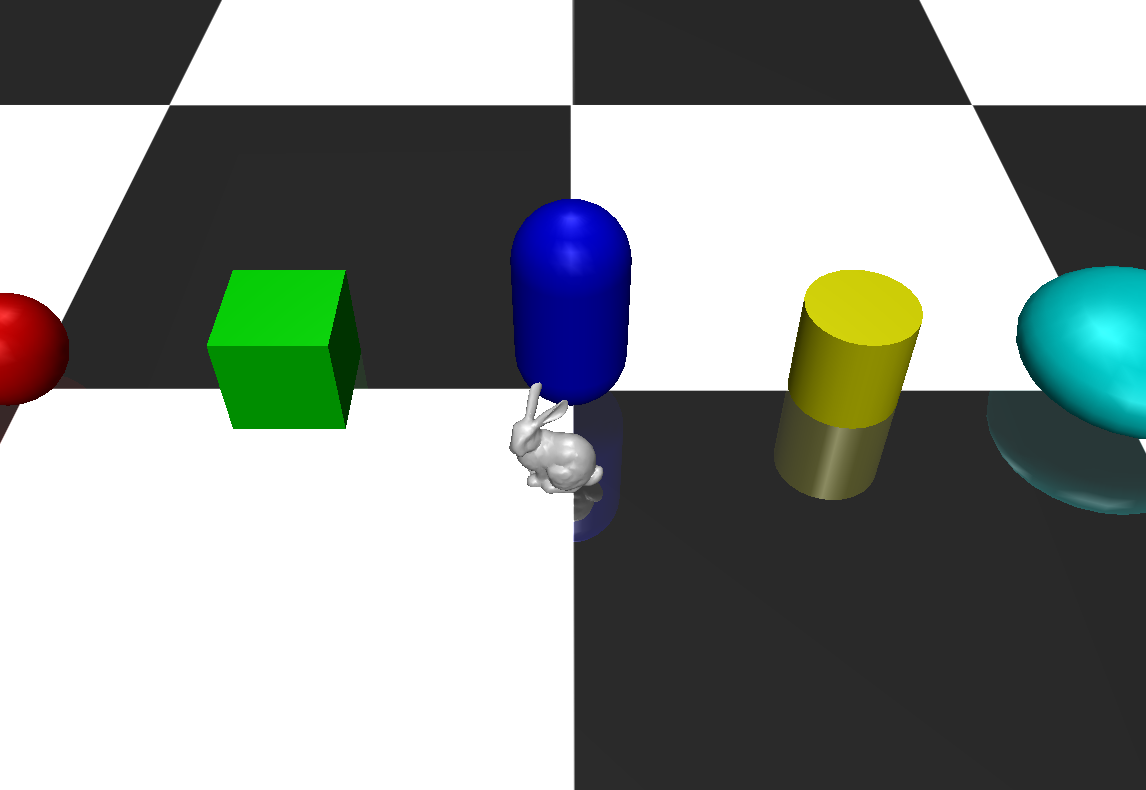
图像分割
mjRND_SEGMENT and mjRND_IDCOLOR
mjtRndFlag中mjRND_SEGMENT是随机颜色分割物体,
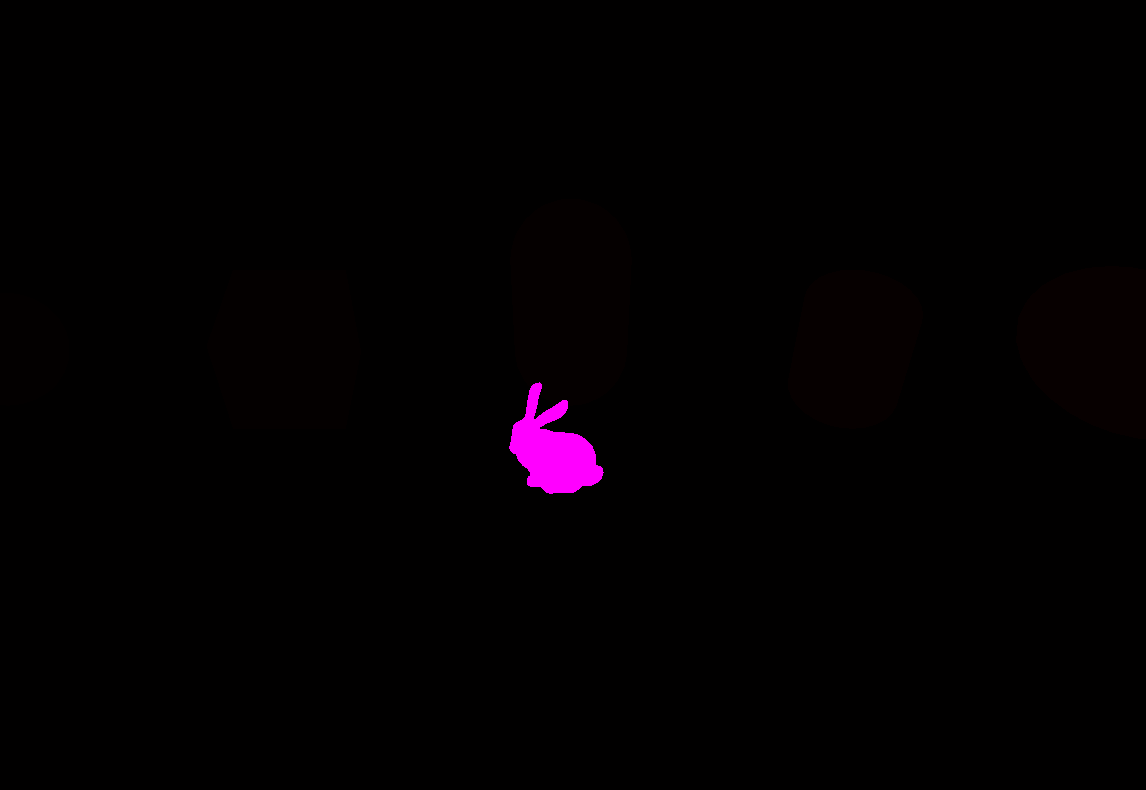
mjRND_IDCOLOR是通过设置mjvGeom.segid固定物体分割颜色
随机分割效果:
mujoco源码中segid映射到rgba见src/render/render_gl3.c如下
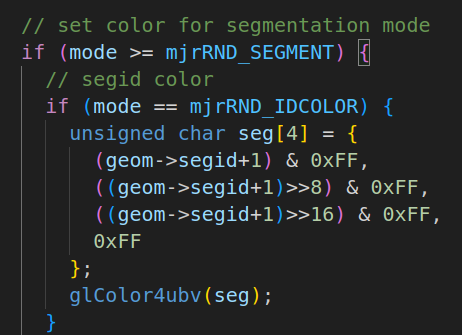
使用segid分割:
单/双目渲染
mjtStereo作用于mjvScene.stereo
分别是单目,四缓冲,并排,可以直接使用mjSTEREO_SIDEBYSIDE显示双目,mjSTEREO_QUADBUFFERED则需要更好一些的GPU
typedef enum mjtStereo_ { // type of stereo rendering
mjSTEREO_NONE = 0, // no stereo; use left eye only
mjSTEREO_QUADBUFFERED, // quad buffered; revert to side-by-side if no hardware support
mjSTEREO_SIDEBYSIDE // side-by-side
} mjtStereo;
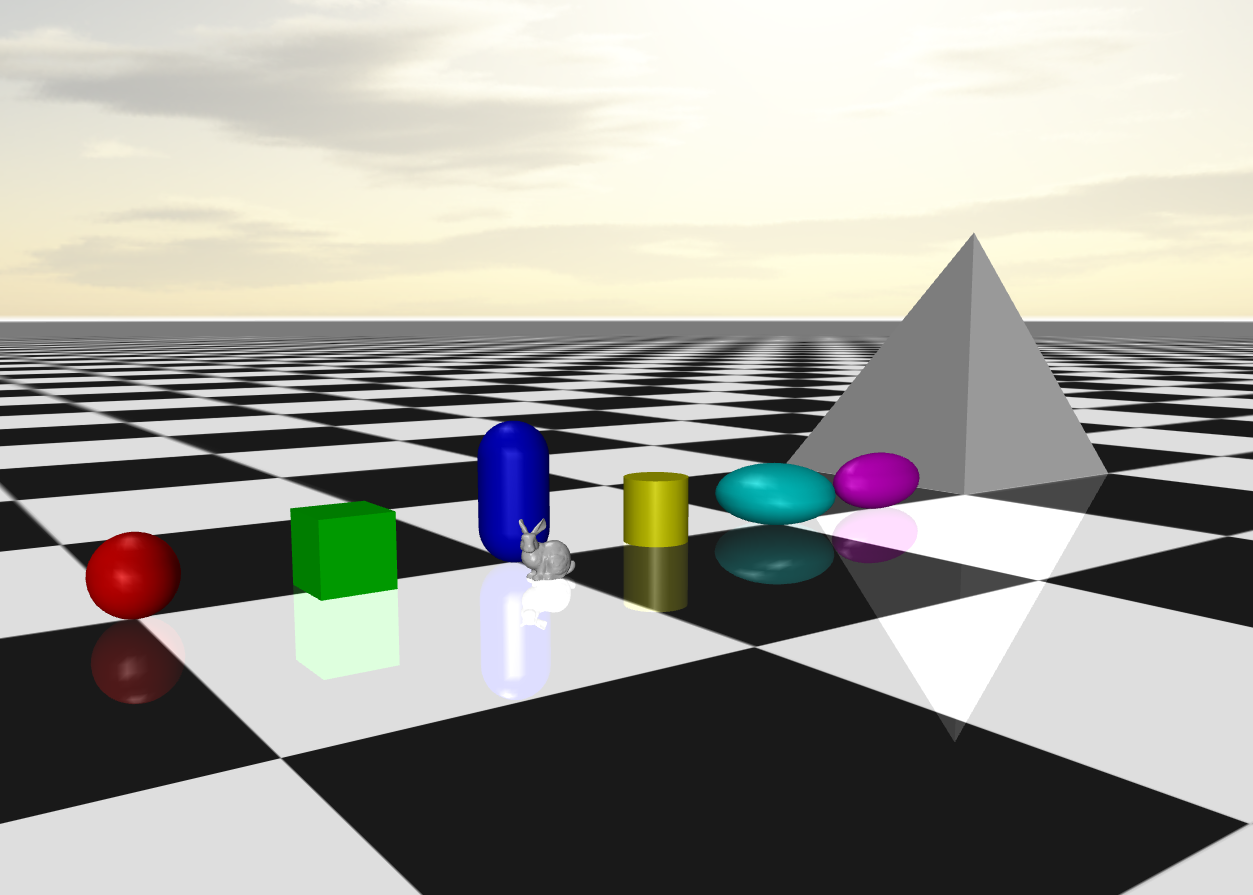
演示:

代码
vis_cfg.cpp
#include <chrono>
#include <cmath>
#include <cstddef>
#include <cstdio>
#include <cstring>
#include <iostream>
#include <mujoco/mjmodel.h>
#include <mujoco/mjrender.h>
#include <mujoco/mjspec.h>
#include <mujoco/mjtnum.h>
#include <mujoco/mjvisualize.h>
#include <thread>
#include "opencv2/opencv.hpp"
#include <GLFW/glfw3.h>
#include <mujoco/mujoco.h>
// MuJoCo data structures
mjModel *m = NULL; // MuJoCo model
mjData *d = NULL; // MuJoCo data
mjvCamera cam; // abstract camera
mjvOption opt; // visualization options
mjvScene scn; // abstract scene
mjrContext con; // custom GPU context
// mouse interaction
bool button_left = false;
bool button_middle = false;
bool button_right = false;
double lastx = 0;
double lasty = 0;
// keyboard callback
void keyboard(GLFWwindow *window, int key, int scancode, int act, int mods) {
// backspace: reset simulation
if (act == GLFW_PRESS && key == GLFW_KEY_BACKSPACE) {
mj_resetData(m, d);
mj_forward(m, d);
}
}
// mouse button callback
void mouse_button(GLFWwindow *window, int button, int act, int mods) {
// update button state
button_left =
(glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_LEFT) == GLFW_PRESS);
button_middle =
(glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_MIDDLE) == GLFW_PRESS);
button_right =
(glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_RIGHT) == GLFW_PRESS);
// update mouse position
glfwGetCursorPos(window, &lastx, &lasty);
}
// mouse move callback
void mouse_move(GLFWwindow *window, double xpos, double ypos) {
// no buttons down: nothing to do
if (!button_left && !button_middle && !button_right) {
return;
}
// compute mouse displacement, save
double dx = xpos - lastx;
double dy = ypos - lasty;
lastx = xpos;
lasty = ypos;
// get current window size
int width, height;
glfwGetWindowSize(window, &width, &height);
// get shift key state
bool mod_shift = (glfwGetKey(window, GLFW_KEY_LEFT_SHIFT) == GLFW_PRESS ||
glfwGetKey(window, GLFW_KEY_RIGHT_SHIFT) == GLFW_PRESS);
// determine action based on mouse button
mjtMouse action;
if (button_right) {
action = mod_shift ? mjMOUSE_MOVE_H : mjMOUSE_MOVE_V;
} else if (button_left) {
action = mod_shift ? mjMOUSE_ROTATE_H : mjMOUSE_ROTATE_V;
} else {
action = mjMOUSE_ZOOM;
}
// move camera
mjv_moveCamera(m, action, dx / height, dy / height, &scn, &cam);
}
// scroll callback
void scroll(GLFWwindow *window, double xoffset, double yoffset) {
// emulate vertical mouse motion = 5% of window height
mjv_moveCamera(m, mjMOUSE_ZOOM, 0, -0.05 * yoffset, &scn, &cam);
}
std::vector<float> get_sensor_data(const mjModel *model, const mjData *data,
const std::string &sensor_name) {
int sensor_id = mj_name2id(model, mjOBJ_SENSOR, sensor_name.c_str());
if (sensor_id == -1) {
std::cout << "no found sensor" << std::endl;
return std::vector<float>();
}
int data_pos = model->sensor_adr[sensor_id];
std::vector<float> sensor_data(model->sensor_dim[sensor_id]);
for (int i = 0; i < sensor_data.size(); i++) {
sensor_data[i] = data->sensordata[data_pos + i];
}
return sensor_data;
}
void get_cam_image(mjvCamera *cam,int width,int height,int stereo) {
mjrRect viewport2 = {0, 0, width, height};
int before_stereo = scn.stereo;
scn.stereo = stereo;
// mujoco更新渲染
mjv_updateCamera(m, d, cam, &scn);
mjr_render(viewport2, &scn, &con);
scn.stereo = before_stereo;
// 渲染完成读取图像
unsigned char *rgbBuffer = new unsigned char[width * height * 3];
float *depthBuffer = new float[width * height];
mjr_readPixels(rgbBuffer, depthBuffer, viewport2, &con);
cv::Mat image(height, width, CV_8UC3, rgbBuffer);
// 反转图像以匹配OpenGL渲染坐标系
cv::flip(image, image, 0);
// 颜色顺序转换这样要使用bgr2rgb而不是rgb2bgr
cv::cvtColor(image, image, cv::COLOR_BGR2RGB);
cv::imshow("Image", image);
cv::waitKey(1);
// 释放内存
delete[] rgbBuffer;
delete[] depthBuffer;
}
// main function
int main(int argc, const char **argv) {
char error[1000] = "Could not load binary model";
m = mj_loadXML("../../../../API-MJCF/vis_cfg.xml", 0, error, 1000);
// make data
d = mj_makeData(m);
// init GLFW
if (!glfwInit()) {
mju_error("Could not initialize GLFW");
}
// create window, make OpenGL context current, request v-sync
GLFWwindow *window = glfwCreateWindow(1200, 900, "Demo", NULL, NULL);
glfwMakeContextCurrent(window);
glfwSwapInterval(1);
// initialize visualization data structures
mjv_defaultCamera(&cam);
mjv_defaultOption(&opt);
mjv_defaultScene(&scn);
mjr_defaultContext(&con);
// create scene and context
mjv_makeScene(m, &scn, 2000);
mjr_makeContext(m, &con, mjFONTSCALE_150);
// install GLFW mouse and keyboard callbacks
glfwSetKeyCallback(window, keyboard);
glfwSetCursorPosCallback(window, mouse_move);
glfwSetMouseButtonCallback(window, mouse_button);
glfwSetScrollCallback(window, scroll);
/*--------可视化配置--------*/
// opt.flags[mjtVisFlag::mjVIS_CONTACTPOINT] = true;
opt.flags[mjtVisFlag::mjVIS_CAMERA] = true;
// opt.flags[mjtVisFlag::mjVIS_CONVEXHULL] = true;
// opt.flags[mjtVisFlag::mjVIS_COM] = true;
// opt.label = mjtLabel::mjLABEL_BODY;
opt.frame = mjtFrame::mjFRAME_BODY;
/*--------可视化配置--------*/
/*--------场景渲染--------*/
// scn.flags[mjtRndFlag::mjRND_WIREFRAME] = true; // 网格化
// scn.flags[mjtRndFlag::mjRND_SEGMENT] = true;
// scn.flags[mjtRndFlag::mjRND_IDCOLOR] = true; // 需要先开启 mjRND_SEGMENT
int bunny_id = mj_name2id(m, mjOBJ_GEOM, "bunny");
/*--------场景渲染--------*/
/*--------单/双目渲染--------*/
scn.stereo = mjtStereo::mjSTEREO_SIDEBYSIDE;
/*--------单/双目渲染--------*/
//相机初始化
mjvCamera cam2;
int camID = mj_name2id(m, mjOBJ_CAMERA, "bunny_eyes");
if (camID == -1) {
std::cerr << "Camera not found" << std::endl;
} else {
mjv_defaultCamera(&cam2);
cam2.fixedcamid = camID;
cam2.type = mjCAMERA_FIXED;
}
auto step_start = std::chrono::high_resolution_clock::now();
while (!glfwWindowShouldClose(window)) {
mj_step(m, d);
get_cam_image(&cam2,1024,640,mjtStereo::mjSTEREO_SIDEBYSIDE);
//同步时间
auto current_time = std::chrono::high_resolution_clock::now();
double elapsed_sec =
std::chrono::duration<double>(current_time - step_start).count();
double time_until_next_step = m->opt.timestep * 5 - elapsed_sec;
if (time_until_next_step > 0.0) {
auto sleep_duration = std::chrono::duration<double>(time_until_next_step);
std::this_thread::sleep_for(sleep_duration);
}
// get framebuffer viewport
mjrRect viewport = {0, 0, 0, 0};
glfwGetFramebufferSize(window, &viewport.width, &viewport.height);
// update scene and render
mjv_updateScene(m, d, &opt, NULL, &cam, mjCAT_ALL, &scn);
/*--------设置分割颜色--------*/
mjvGeom *geom;
// std::cout << scn.ngeom << std::endl;
for (int i = 0; i < scn.ngeom; i++) {
geom = scn.geoms + i;
if (geom->objid == bunny_id && geom->objtype == mjOBJ_GEOM)
break;
}
uint32_t r = 254; // 255 会溢出
uint32_t g = 0;
uint32_t b = 255;
geom->segid = (b << 16) | (g << 8) | r;
// std::cout << geom->segid << std::endl;
/*--------设置分割颜色--------*/
mjr_render(viewport, &scn, &con);
// swap OpenGL buffers (blocking call due to v-sync)
glfwSwapBuffers(window);
// process pending GUI events, call GLFW callbacks
glfwPollEvents();
}
// free visualization storage
mjv_freeScene(&scn);
mjr_freeContext(&con);
// free MuJoCo model and data
mj_deleteData(d);
mj_deleteModel(m);
// terminate GLFW (crashes with Linux NVidia drivers)
#if defined(__APPLE__) || defined(_WIN32)
glfwTerminate();
#endif
return 1;
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.20)
project(MUJOCO_T)
include_directories(${CMAKE_CURRENT_SOURCE_DIR}/simulate)
#编译安装,从cmake安装位置opt使用
# 设置 MuJoCo 的路径
set(MUJOCO_PATH "/home/nzb/programs/mujoco-3.3.0")
# 包含 MuJoCo 的头文件
include_directories(${MUJOCO_PATH}/include)
# 设置 MuJoCo 的库路径
link_directories(${MUJOCO_PATH}/bin)
set(MUJOCO_LIB ${MUJOCO_PATH}/lib/libmujoco.so)
find_package(OpenCV REQUIRED)
add_executable(vis_cfg vis_cfg.cpp)
#从cmake安装位置opt使用
target_link_libraries(vis_cfg ${MUJOCO_LIB} glut GL GLU glfw ${OpenCV_LIBS})