datetime:2025/12/28 12:25
author:nzb
该项目来源于mujoco_learning
传感器
传感器基础属性为 name,noise(已经没有用了,仅作为标记信息),cutoff(是否绝 对值输出数据)
camera
和light元素很像,就像一个聚光灯一样。相同的配置有name.mode,target.pos,姿态的quat, axisangle, xyaxes, zaxis, euler,这些配置和上面的light一样。下面说明特有配置。(获取相机画面在mujoco接口里面讲解)
mode=[fixed/track/trackcom/targetbody/targetbodycom]
设置相机视野有分为两种:
1. fovy=" 45 "(垂直视野,单位度)。
2. focal=" 00 "(焦距还对画面的长宽拉伸有影响,长度单位),sensorsize=" 00 "
(传感器尺寸,对畸变影响较大),resolution=" 00 "(分辨率)。
focalpixel=" 0 0 "
焦距,单位像素
sensorsize=" 00 "
传感器角度
resolution=" 00 "
分辨率
相机中心位置和fovy冲突principal="0 0"(相机中心位置,长度单位)
principalpixel="0 0"
相机中心位置,像素偏移
ipd="0.068"
瞳距,给双目用的
演示1:
<camera name="cam2armor" mode="targetbody" target="armor0" principalpixel="200 200" focalpixel="1280 1080" sensorsize="4 4" resolution="1280 1080"/>
演示2:
<camera name="cam2armor1" mode="targetbody" target="armor0" fovy="54.225" />
IMU
imu是常见机器人传感器,在mujoco中没有imu,而是分成了三个传感器(imu本身也是组合传感器),accelerometer(加速度计),gyro(陀螺仪)framequat(姿态),这三个传感器都是输出三个数据,分别是x,y,z轴或者方向的数据。只要将这三个组合一下就能得到imu。 在使用传感器的时候一般使用一个 site作为传感器安装位置,然后将传感器的 site 固定到 site上。 在使用传感器的时候一般使用一个site作为传感器安装位置,然后将传感器的site固定到site上。
F4 打开传感器窗口
演示:
<site name="imu" type="box" size="0.02 0.02 0.02" />
......
<sensor>
<!-- framequat 是姿态传感器,输出的是四元数数据,数据来自mjData.qpos -->
<framequat name='orientation' objtype='site' objname='imu' />
<!-- accelerometer 是加速度计,输出的是三个轴的数据,数据来自mjData.qacc -->
<accelerometer name="accel" site="imu" />
<!-- gyro 是陀螺仪,输出的是三个轴的数据,数据来自mjData.qvel -->
<gyro name='base_ang_vel' site='imu' />
<!-- subtreelinvel 是线速度,它是需要安装在 body 上的,输出的是三个轴的数据,数据来自mjData.qvel -->
<subtreelinvel name="base_lin_vel" body="B" />
</sensor>
关节角度传感器
 关节角度直接来自 mjData.qpos
关节角度直接来自 mjData.qpos
<jointpos joint="joint_name" name="this_name"/>
关节速度传感器
 关节角速度直接来自 mjData.qvel
关节角速度直接来自 mjData.qvel
<jointvel joint="joint_name" name="this_name"/>
激光测距传感器
 绑定在 site上。不可见或者 rgba中 alpha= 0 的几何体不会被测量到,通过禁用其
geom组而在visualizer中不可见的会被测量。
激光雷达处理
激光雷达可以使用阵列排布传感器,在上面阵列排布中我们已经写完了传感器的阵列,
接下来只需要在传感器中将激光测距传感器绑定在阵列的 site中即可。
绑定在 site上。不可见或者 rgba中 alpha= 0 的几何体不会被测量到,通过禁用其
geom组而在visualizer中不可见的会被测量。
激光雷达处理
激光雷达可以使用阵列排布传感器,在上面阵列排布中我们已经写完了传感器的阵列,
接下来只需要在传感器中将激光测距传感器绑定在阵列的 site中即可。
<rangefinder site="rf" />
3D激光雷达,我们只需要在xyz三个轴上分别阵列排布即可,注意按照现实中的激光雷达参数进行排布。
演示在第7节
效果:
建议:激光雷达在mujoco中计算频率和仿真频率相同,当点云数量较多的时候会严重影响效率,一般激光雷达的反馈频率都比较低,所以建议但开一个线程和模型单独计算激光雷达的点云数据。
力传感器( force and torque )
这两个都是在body之间作用的,加入力传感器我们可以知道一个body对另一个body的作用力。力传感器通过site安装到body中。
演示:
<body pos="0 0 1">
<geom type="box" size=".3 .3 .005" rgba=".2 .2 .2 1"/>
<body name="up_box" pos="0 0 .02">
<site name="force_torque" />
<geom type="box" size=".3 .3 .005" rgba=".3 .3 1 1"/>
</body>
</body>
sensor:
<sensor>
<force name="force" site="force_torque" />
<torque name="torque" site="force_torque" />
</sensor>
球形关节传感器
ballquat 直接指定关节即可,传感器信息是球形关节四元数数据,数据和mjData.qpos一致。 ballangvel 直接指定关节即可,传感器信息是球形关节三个角速度数据,数据和mjData.qvel一致。
演示:
<ballquat name="ball" site="ball" />
<ballangvel name="ball" site="ball" />
相对传感器
前面带 fram的都是可以获得全局或者相对的传感器数据。
位置传感器

objtype=[body,xbody,geom,site,camera]
传感器链接对象类型,body是全局,xbody是相对坐标
objname=""
传感器链接对象
reftype=[body,xbody,geom,site,camera]
参照系所附加到的对象的类型
refname=""
引用框架所附加到的对象的名称。
解释:如果指定了 reftype和 refname那么传感器测量的就是相对于 refname的坐标。
姿态传感器
 这个参数和上面的一样。
这个参数和上面的一样。
速度、角速度、加速度和角加速度传感器
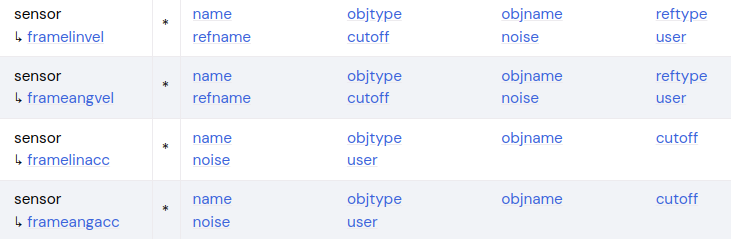 这些参数和上面的一样。
这些参数和上面的一样。
质心传感器
subtreecom可以获得body的运动质心的全局坐标。subtreelinvel可以获得body运动质心的线速度,subtreeangmom获得质心角动量。 这些传感器都是两个参数name和body(指定测量body)。
<?xml version="1.0" encoding="utf-8"?>
<mujoco model="inverted_pendulum">
<compiler angle="radian" meshdir="meshes" autolimits="true" />
<option timestep="0.002" gravity="0 0 -9.81" integrator="implicitfast" density="1.225"
viscosity="1.8e-5" />
<visual>
<quality shadowsize="16384" numslices="28" offsamples="4" />
<headlight diffuse="1 1 1" specular="0.5 0.5 0.5" active="1" />
</visual>
<asset>
<mesh name="tetrahedron" vertex="0 0 0 1 0 0 0 1 0 0 0 1" />
<texture type="skybox" file="../asset/desert.png"
gridsize="3 4" gridlayout=".U..LFRB.D.." />
<texture name="plane" type="2d" builtin="checker" rgb1=".1 .1 .1" rgb2=".9 .9 .9"
width="512" height="512" mark="cross" markrgb=".8 .8 .8" />
<material name="plane" reflectance="0.3" texture="plane" texrepeat="1 1" texuniform="true" />
</asset>
<worldbody>
<geom name="floor" pos="0 0 0" size="0 0 .25" type="plane" material="plane"
condim="3" />
<light directional="true" ambient=".3 .3 .3" pos="30 30 30" dir="0 -.5 -1"
diffuse=".5 .5 .5" specular=".5 .5 .5" />
<camera name="c2" pos="1 0 1" mode="targetbody" target="B" fovy="54.225" />
<body name="B" pos="0 0 0">
<freejoint />
<site name="imu" />
<camera name="c1" mode="fixed" fovy="54.225" euler="3.14 0 0" />
<geom type="box" size="0.1 0.1 0.1" rgba=".5 .5 .5 1" />
</body>
<body pos="0 0 1">
<geom type="box" size=".3 .3 .005" rgba=".2 .2 .2 1" />
<body name="up_box" pos="0 0 .02">
<site name="force_torque" />
<geom type="box" size=".3 .3 .005" rgba=".3 .3 1 1" mass="0.01" />
</body>
</body>
<!-- 支撑柱 -->
<body name="support" pos="1 0 0.1">
<geom type="cylinder" mass="100" size="0.05 0.5" rgba="0.2 0.2 0.2 1" />
<!-- 水平杆 -->
<body name="rotay_am" pos="0 0 0.51">
<joint type="hinge" name="pivot" pos="0 0 0" axis="0 0 1" damping="0.001"
frictionloss="0.0" stiffness="0.5" />
<geom type="capsule" mass="0.01" fromto="0 0 0 0.2 0 0" size="0.01"
rgba="0.8 0.2 0.2 0.5" />
<!-- 摆 -->
<body name="pendulum" pos="0.2 0 0">
<joint type="ball" name="ph" pos="0 0 0" damping="0.001"
frictionloss="0.0" />
<geom type="capsule" mass="0.005" fromto="0 0 0 0 0 -0.3" size="0.01"
rgba="0.8 0.2 0.2 1" />
<!-- 配重 -->
<geom type="sphere" mass="0.01" size="0.03" pos="0 0 -0.3" rgba="0.2 0.8 0.2 1" />
</body>
</body>
</body>
</worldbody>
<sensor>
<!-- Imu -->
<!-- <framequat name='orientation' objtype='site' objname='imu' />
<gyro name='base_ang_vel' site='imu' />
<accelerometer name="accel" site="imu" />
<subtreelinvel name="base_lin_vel" body="B" /> -->
<!-- 相对传感器 -->
<!-- <framepos name='base_pos' objtype='body' objname='B' /> -->
<!-- 力传感器 -->
<!-- <force name="force" site="force_torque" />
<torque name="torque" site="force_torque" /> -->
<!-- 关节角度传感器 和 关节速度传感器 -->
<!-- <jointpos name='pivot_p' joint='pivot' />
<jointvel name='pivot_v' joint='pivot' /> -->
<!-- 球形关节传感器 -->
<!-- <ballquat name="ballquat" joint="ph" />
<ballangvel name="ballangvel" joint="ph" /> -->
</sensor>
<actuator>
<position kp="2" kv="0.1" name="pivot" joint="pivot" ctrlrange="-3.14 3.14"
forcerange="-5 5" />
</actuator>
</mujoco>