datetime:2025/12/28 12:25
author:nzb
该项目来源于mujoco_learning
get obj
获取名字
数量
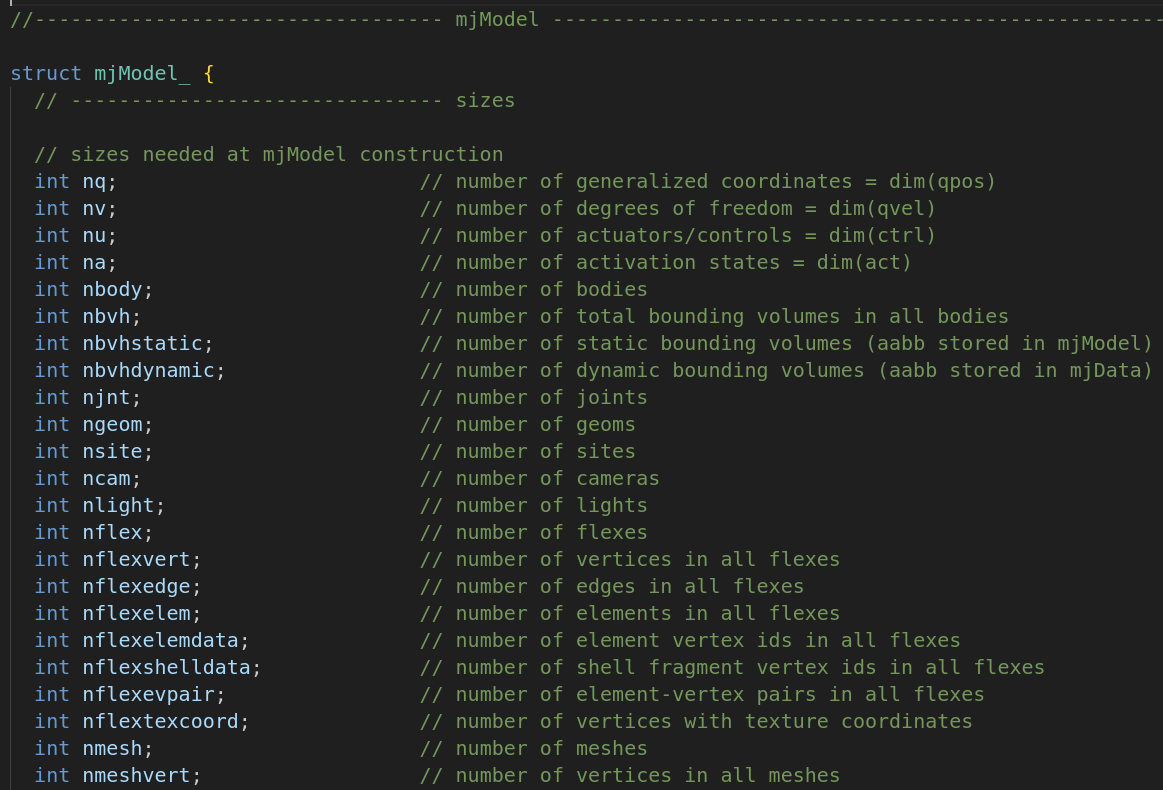 先看mjModel结构体开头部分,这里的命名方式都是nXXX,这代表各个元素的数量
先看mjModel结构体开头部分,这里的命名方式都是nXXX,这代表各个元素的数量
获取id
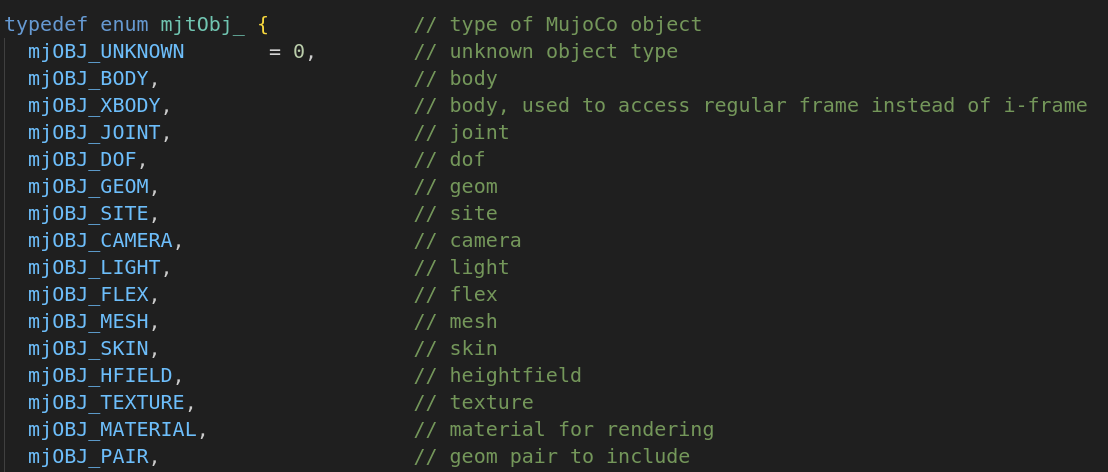
MJAPI int mj_name2id(const mjModel* m, int type, const char* name);
通过 name 获取实体的id
m:mjModeltype:mjmodel.h文件中的mjtObj中定义,这个是要获取id的实体类型一下是部分type类型枚举,在mjtObj中找到name: name
获取位置
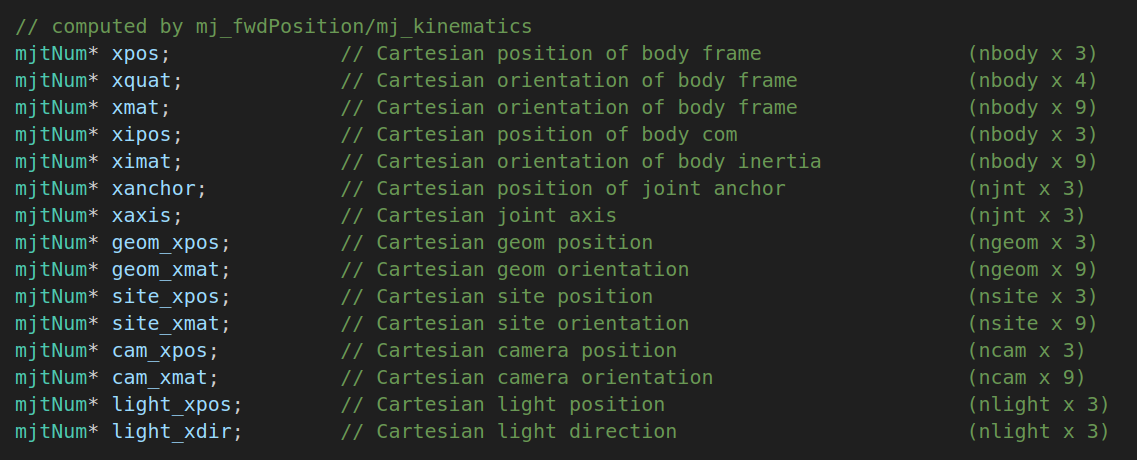 可以通过 xpos和xxx_xpos获取各个对象的位置
可以通过 xpos和xxx_xpos获取各个对象的位置
获取姿态
通过xquat可以获取body的姿态
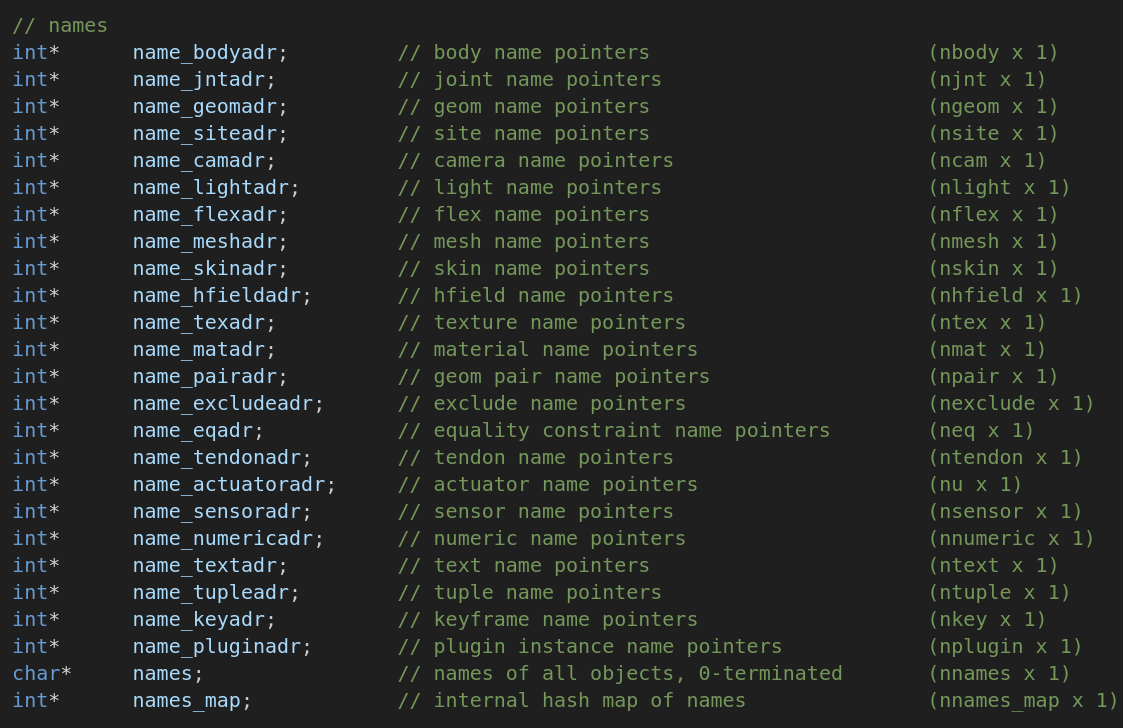
我们可以和C++接口一样通过m.names中寻找各个实体的名字nXXX得到实体数量,name_xxxadr来寻找实体名字在names中的索引。 在names中名字字符串之间通过”\x00”分割,name_xxxadr定位到的是该实体的第一个字符的位置,可以使用python的数组截取功能实现读取字符串,在寻找末尾的0来截取实体的实际名字。
name= m.names[m.name_bodyadr[1]:]
for i in range(len(name)):
if name[i] == 0:
name = name[:i]
break
print(name)
代码
import time
import math
import mujoco
import mujoco.viewer
m = mujoco.MjModel.from_xml_path('../API-MJCF/pointer.xml')
d = mujoco.MjData(m)
with mujoco.viewer.launch_passive(m, d) as viewer:
# Close the viewer automatically after 30 wall-seconds.
start = time.time()
cnt = 0
while viewer.is_running() and time.time() - start < 30:
step_start = time.time()
# d.ctrl[1] = math.sin(cnt)
mujoco.mj_step(m, d)
# print(m.nbody)
# print(m.njnt)
# print(m.names)
bsae_id = mujoco.mj_name2id(m,mujoco.mjtObj.mjOBJ_BODY,"pointer")
# print(bsae_id)
# print(d.xpos[bsae_id])
imu_id = mujoco.mj_name2id(m,mujoco.mjtObj.mjOBJ_SITE,"imu")
print(d.site_xpos[imu_id])
# w x y z
print(d.xquat[bsae_id])
cnt += 0.005
# Example modification of a viewer option: toggle contact points every two seconds.
with viewer.lock():
viewer.opt.flags[mujoco.mjtVisFlag.mjVIS_CONTACTPOINT] = int(d.time % 2)
# Pick up changes to the physics state, apply perturbations, update options from GUI.
viewer.sync()
# Rudimentary time keeping, will drift relative to wall clock.
time_until_next_step = m.opt.timestep - (time.time() - step_start)
if time_until_next_step > 0:
time.sleep(time_until_next_step)