datetime:2025/04/24 11:47
author:nzb
运动规划 (Motion Planning)
运动规划插件 (The Motion Planning Plugin)
MoveIt通过插件接口与多种运动规划库交互,使其具备高度可扩展性。运动规划器通过ROS action或service(由move_group节点提供)与MoveIt通信。默认规划器由MoveIt Setup Assistant配置,主要基于OMPL(Open Motion Planning Library),同时支持其他规划器(如Pilz工业运动规划器和CHOMP)。
运动规划请求 (The Motion Plan Request)
运动规划请求定义了规划目标,例如:
- 将机械臂移动到关节空间中的新位置
- 使末端执行器到达指定位姿
默认启用碰撞检测(包括自碰撞和附着物体检测)。用户可通过参数指定规划器和约束条件,MoveIt内置的约束类型包括:
- 位置约束:限制某连杆的位置在空间特定区域内。
- 方向约束:限制连杆的滚转、俯仰或偏航角范围。
- 可见性约束:确保连杆上的某点位于传感器视野锥内。
- 关节约束:限制关节运动在设定范围内。
- 自定义约束:支持通过回调函数定义用户专属约束。
运动规划结果 (The Motion Plan Result)
move_group节点响应请求后生成时间参数化轨迹(而非单纯路径),该轨迹会考虑指定的最大速度和加速度限制,确保关节级运动符合动力学约束。
运动规划适配器 (Motion Planning Adapters)
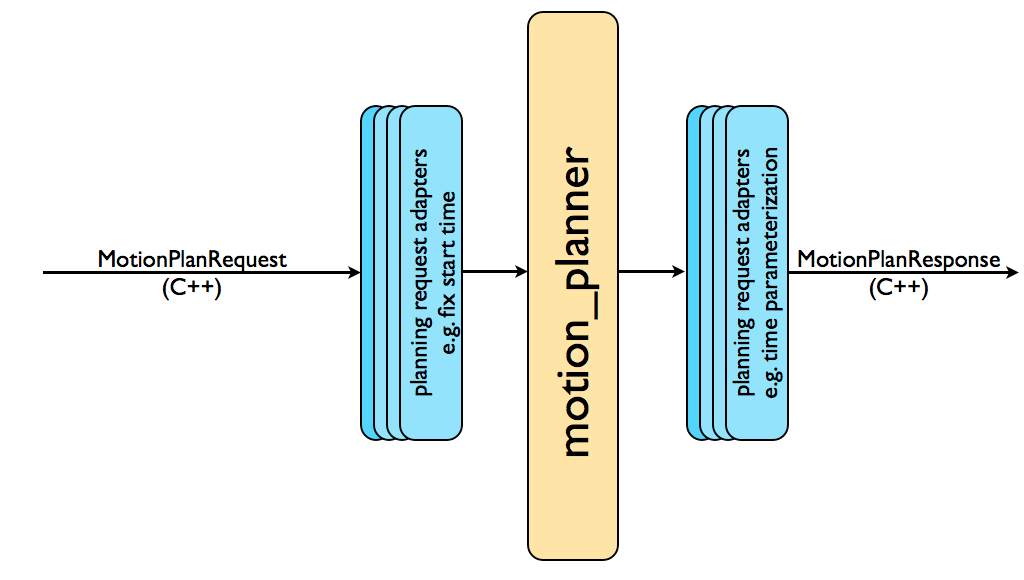
完整运动规划流程由规划器与规划请求适配器协同完成。适配器负责请求预处理和响应后处理,预处理在多种情况下都很有用,例如,当机器人的起始状态略微超出指定的机器人关节限制时。其他一些操作也需要后处理,例如将为机器人生成的路径转换为时间参数化轨迹。MoveIt 提供了一组默认的运动规划适配器,每个适配器都能执行特定的功能。
CheckStartStateBounds
- 功能:若起始状态超出URDF定义的关节限位,将其调整至限位内。
- 参数:可设置允许的超出阈值(避免大幅越限时强行修正)。
ValidateWorkspaceBounds
- 功能:若请求未指定工作空间,默认启用
10m×10m×10m的立方体空间。
- 功能:若请求未指定工作空间,默认启用
CheckStartStateCollision
- 功能:若起始状态存在碰撞,通过微调关节值采样无碰撞配置。
- 参数:
jiggle_fraction:扰动幅度(占关节运动范围的百分比)。- 最大随机采样次数。
AddTimeParameterization
- 功能:将“无时间参数的路径”转换为符合速度/加速度约束的轨迹。
ResolveConstraintFrames
- 功能:将约束坐标系转换为物体或机器人本体坐标系(例如将目标位姿从
cup/handle转换到cup)。
- 功能:将约束坐标系转换为物体或机器人本体坐标系(例如将目标位姿从
OMPL集成
OMPL(开源运动规划库)是MoveIt的默认规划引擎,专注于随机化规划算法。其本身无机器人模型概念,MoveIt为其提供机器人后端支持,实现具体场景的规划。