datetime:2025/01/10 14:45
author:nzb
该项目来源于mujoco_learning
可视化及渲染
可视化配置
mjtVisFlag对应mjvOption.flags中的设置,在simulate中对应如下配置
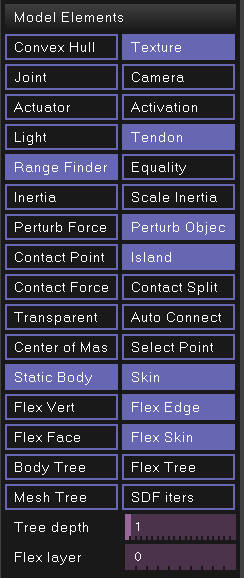
可以使用opt.flags[mjtVisFlag::mjVIS_XXX]=true开启功能
typedef enum mjtVisFlag_ { // flags enabling model element visualization
mjVIS_CONVEXHULL = 0, // mesh convex hull
mjVIS_TEXTURE, // textures
mjVIS_JOINT, // joints
mjVIS_CAMERA, // cameras
mjVIS_ACTUATOR, // actuators
mjVIS_ACTIVATION, // activations
mjVIS_LIGHT, // lights
mjVIS_TENDON, // tendons
mjVIS_RANGEFINDER, // rangefinder sensors
mjVIS_CONSTRAINT, // point constraints
mjVIS_INERTIA, // equivalent inertia boxes
mjVIS_SCLINERTIA, // scale equivalent inertia boxes with mass
mjVIS_PERTFORCE, // perturbation force
mjVIS_PERTOBJ, // perturbation object
mjVIS_CONTACTPOINT, // contact points
mjVIS_ISLAND, // constraint islands
mjVIS_CONTACTFORCE, // contact force
mjVIS_CONTACTSPLIT, // split contact force into normal and tangent
mjVIS_TRANSPARENT, // make dynamic geoms more transparent
mjVIS_AUTOCONNECT, // auto connect joints and body coms
mjVIS_COM, // center of mass
mjVIS_SELECT, // selection point
mjVIS_STATIC, // static bodies
mjVIS_SKIN, // skin
mjVIS_FLEXVERT, // flex vertices
mjVIS_FLEXEDGE, // flex edges
mjVIS_FLEXFACE, // flex element faces
mjVIS_FLEXSKIN, // flex smooth skin (disables the rest)
mjVIS_BODYBVH, // body bounding volume hierarchy
mjVIS_FLEXBVH, // flex bounding volume hierarchy
mjVIS_MESHBVH, // mesh bounding volume hierarchy
mjVIS_SDFITER, // iterations of SDF gradient descent
mjNVISFLAG // number of visualization flags
} mjtVisFlag;
mjvOption.label使用mjtLabel显示对应标签
mjvOption.frame使用mjtFrame显示对应坐标系
mjvOption中还可以设置分组的可视化和bvh树深度
完整定义:
struct mjvOption_ { // abstract visualization options
int label; // what objects to label (mjtLabel)
int frame; // which frame to show (mjtFrame)
mjtByte geomgroup[mjNGROUP]; // geom visualization by group
mjtByte sitegroup[mjNGROUP]; // site visualization by group
mjtByte jointgroup[mjNGROUP]; // joint visualization by group
mjtByte tendongroup[mjNGROUP]; // tendon visualization by group
mjtByte actuatorgroup[mjNGROUP]; // actuator visualization by group
mjtByte flexgroup[mjNGROUP]; // flex visualization by group
mjtByte skingroup[mjNGROUP]; // skin visualization by group
mjtByte flags[mjNVISFLAG]; // visualization flags (indexed by mjtVisFlag)
int bvh_depth; // depth of the bounding volume hierarchy to be visualized
int flex_layer; // element layer to be visualized for 3D flex
};
typedef struct mjvOption_ mjvOption;
场景渲染
mjtRndFlag作用于mjvScene.flags,对应simulate中如下配置
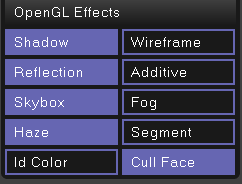
typedef enum mjtRndFlag_ { // flags enabling rendering effects
mjRND_SHADOW = 0, // shadows
mjRND_WIREFRAME, // wireframe
mjRND_REFLECTION, // reflections
mjRND_ADDITIVE, // additive transparency
mjRND_SKYBOX, // skybox
mjRND_FOG, // fog
mjRND_HAZE, // haze
mjRND_SEGMENT, // segmentation with random color
mjRND_IDCOLOR, // segmentation with segid+1 color
mjRND_CULL_FACE, // cull backward faces
mjNRNDFLAG // number of rendering flags
} mjtRndFlag;
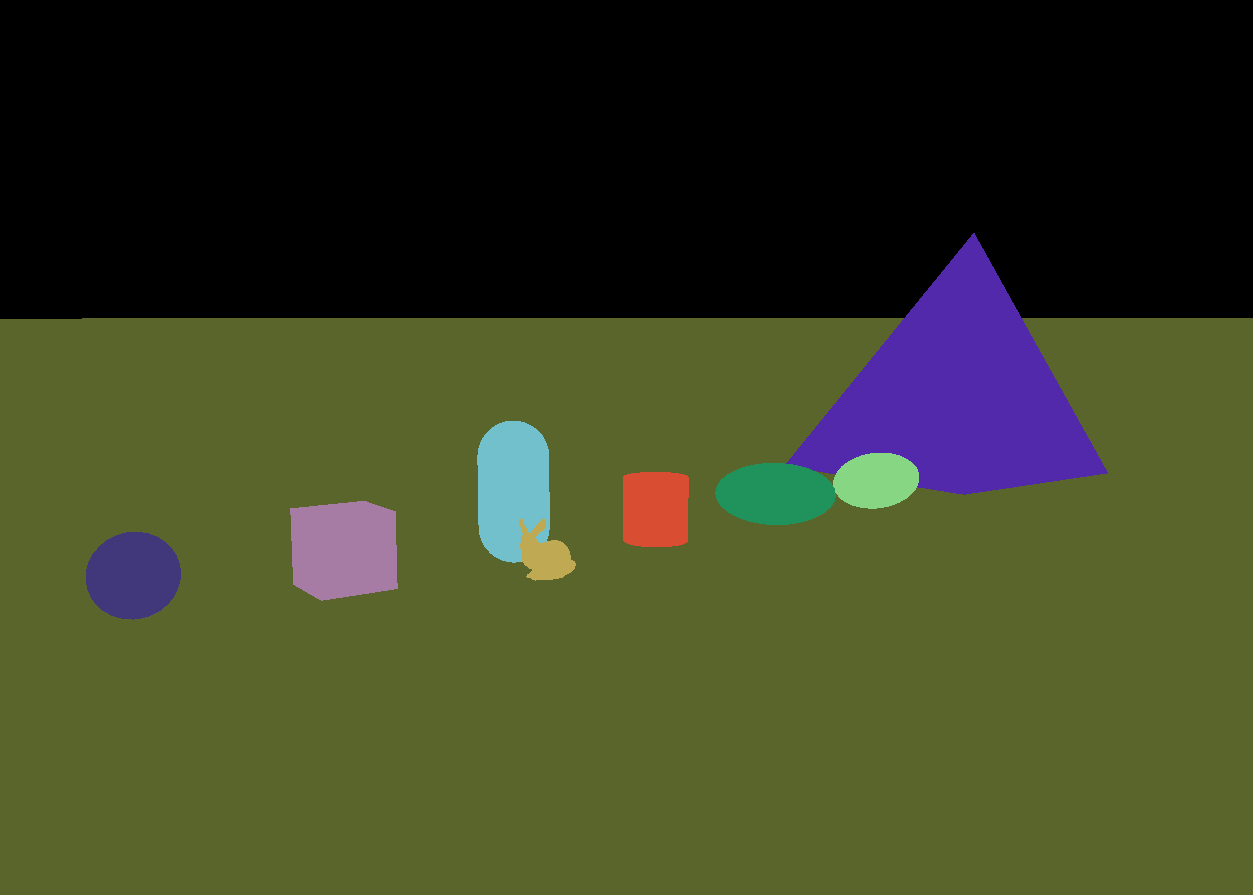
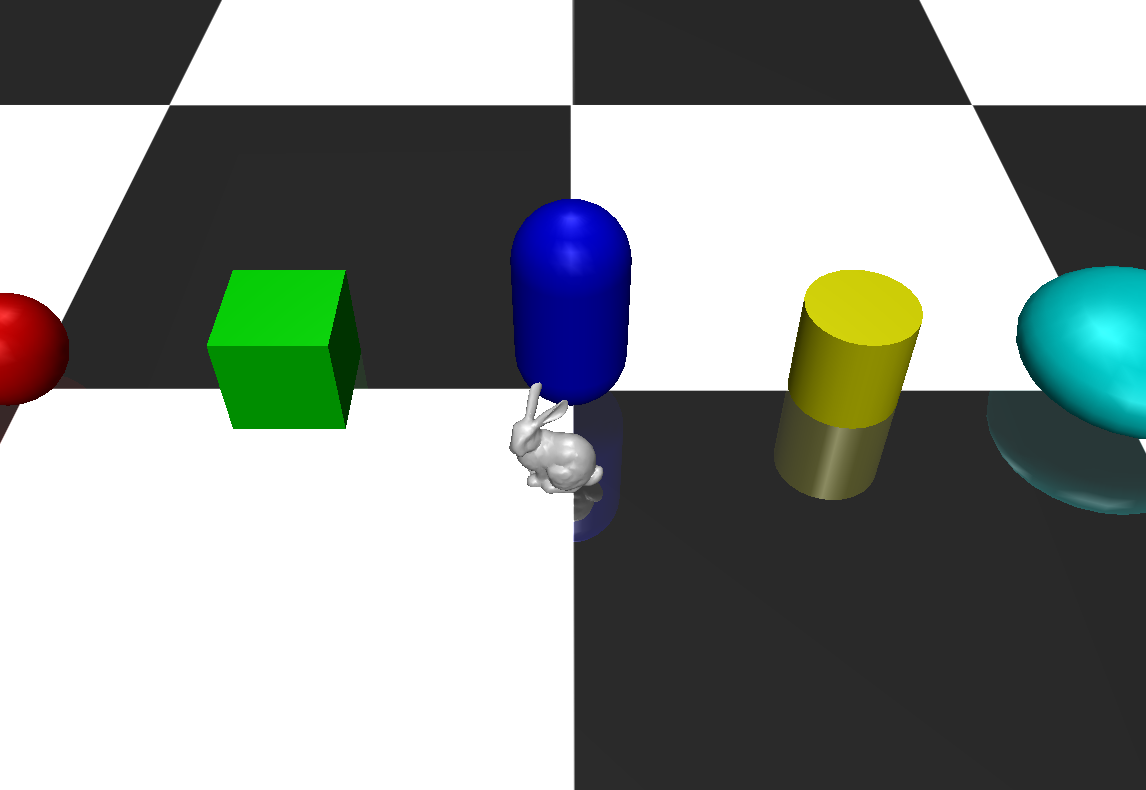
图像分割
mjRND_SEGMENT and mjRND_IDCOLOR
mjtRndFlag中mjRND_SEGMENT是随机颜色分割物体,
mjRND_IDCOLOR是通过设置mjvGeom.segid固定物体分割颜色
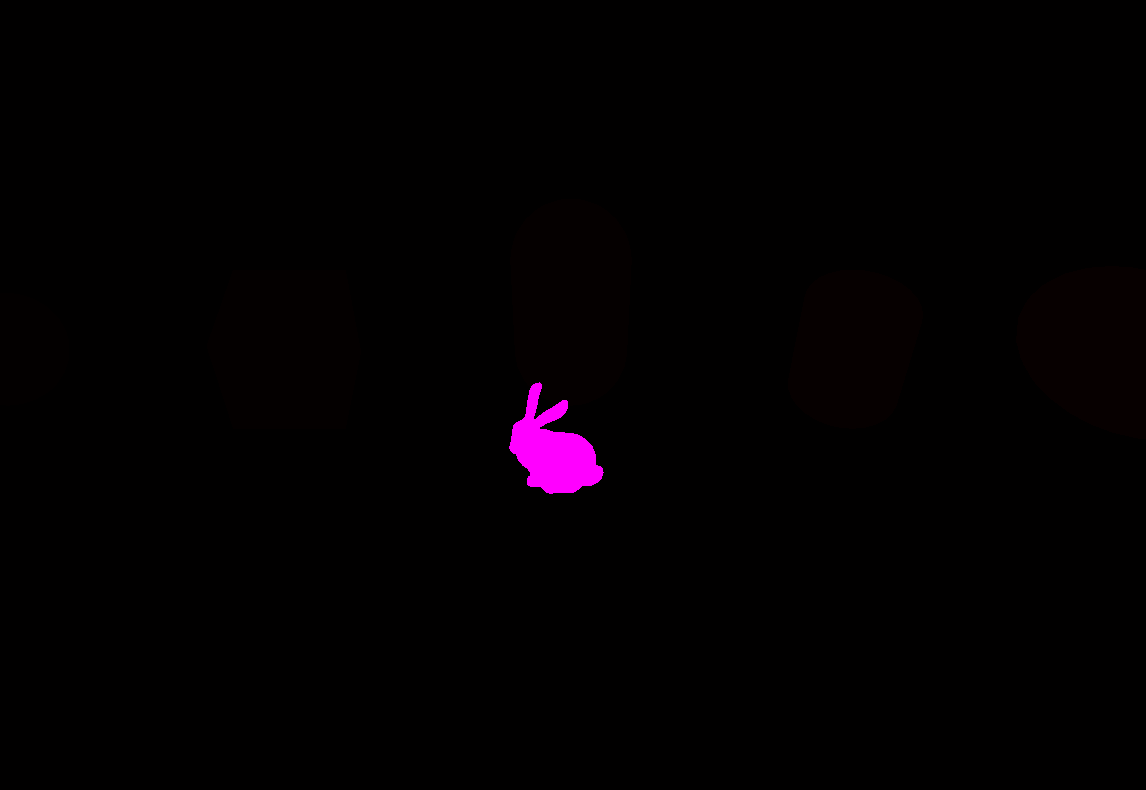
随机分割效果:
mujoco源码中segid映射到rgba见src/render/render_gl3.c如下
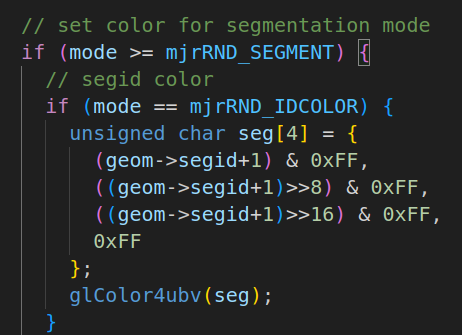
使用segid分割:
单/双目渲染
mjtStereo作用于mjvScene.stereo
分别是单目,四缓冲,并排,可以直接使用mjSTEREO_SIDEBYSIDE显示双目,mjSTEREO_QUADBUFFERED则需要更好一些的GPU
typedef enum mjtStereo_ { // type of stereo rendering
mjSTEREO_NONE = 0, // no stereo; use left eye only
mjSTEREO_QUADBUFFERED, // quad buffered; revert to side-by-side if no hardware support
mjSTEREO_SIDEBYSIDE // side-by-side
} mjtStereo;
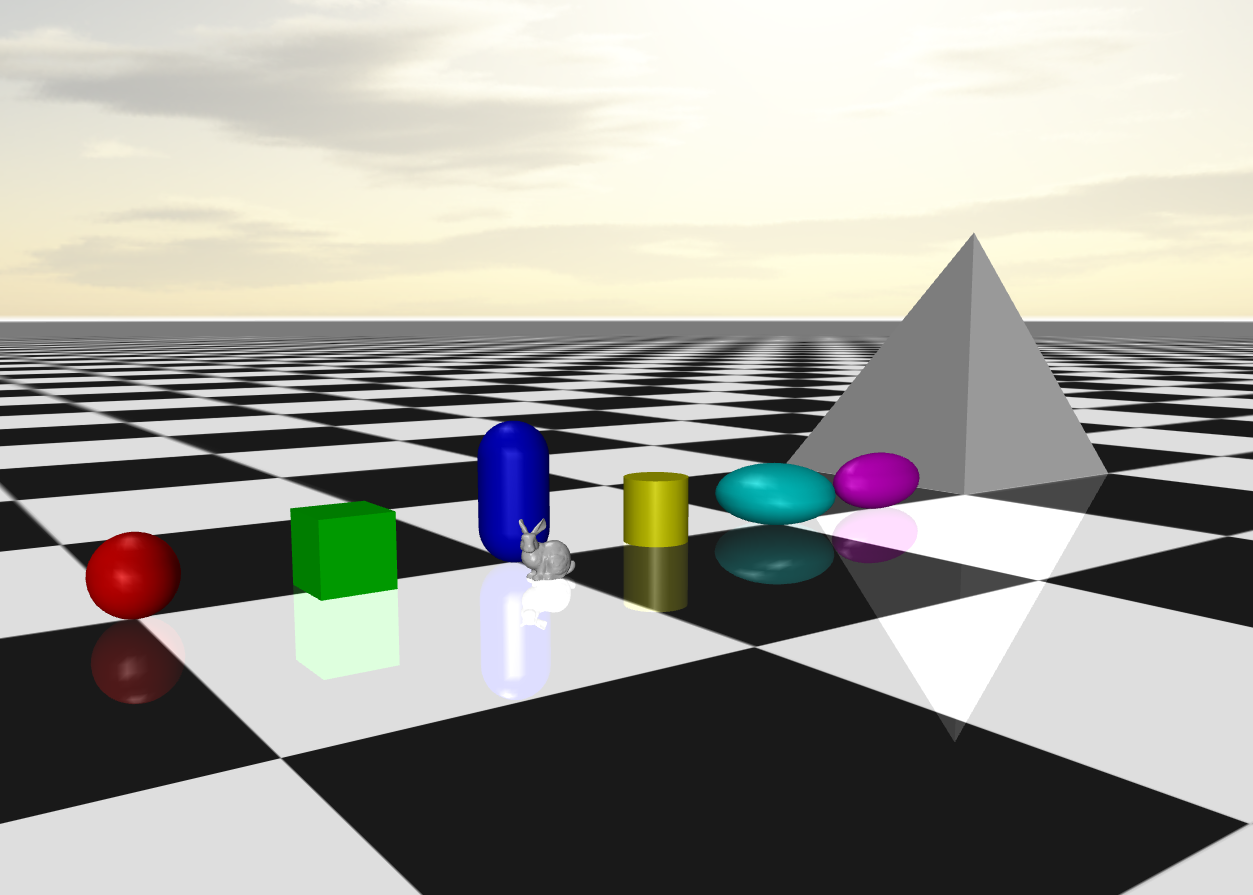
演示:

代码
import time
import math
import mujoco
import mujoco.viewer
import cv2
import glfw
import numpy as np
m = mujoco.MjModel.from_xml_path('../../API-MJCF/vis_cfg.xml')
d = mujoco.MjData(m)
glfw.init()
glfw.window_hint(glfw.VISIBLE,glfw.FALSE)
window = glfw.create_window(1920,1080,"mujoco",None,None)
glfw.make_context_current(window)
#创建相机
camera = mujoco.MjvCamera()
camID = mujoco.mj_name2id(m, mujoco.mjtObj.mjOBJ_CAMERA, "look_bunny")#look_bunny bunny_eyes
camera.fixedcamid = camID
camera.type = mujoco.mjtCamera.mjCAMERA_FIXED
scene = mujoco.MjvScene(m, maxgeom=2000)
context = mujoco.MjrContext(m, mujoco.mjtFontScale.mjFONTSCALE_150)
def get_image(w,h,stereo=mujoco.mjtStereo.mjSTEREO_NONE):
before_stereo = scene.stereo
scene.stereo = stereo
viewport = mujoco.MjrRect(0, 0, w, h)
# 更新场景
mujoco.mjv_updateScene(
m, d, mujoco.MjvOption(),
None, camera, mujoco.mjtCatBit.mjCAT_ALL, scene
)
'''--------设置分割颜色--------'''
for i in range(scene.ngeom):
geom = scene.geoms[i]
if geom.objid == bunny_id and geom.objtype == mujoco.mjtObj.mjOBJ_GEOM:
r = 254
g = 0
b = 255
geom.segid = b << 16 | g << 8 | r
'''--------设置分割颜色--------'''
# 渲染到缓冲区
mujoco.mjr_render(viewport, scene, context)
scene.stereo = before_stereo
# 读取 RGB 数据(格式为 HWC, uint8)
rgb = np.zeros((h, w, 3), dtype=np.uint8)
mujoco.mjr_readPixels(rgb, None, viewport, context)
cv_image = cv2.cvtColor(np.flipud(rgb), cv2.COLOR_RGB2BGR)
return cv_image
with mujoco.viewer.launch_passive(m, d) as viewer:
'''--------可视化配置--------'''
viewer.opt.flags[mujoco.mjtVisFlag.mjVIS_CAMERA] = True
'''--------可视化配置--------'''
'''--------场景渲染--------'''
# scene.flags[mujoco.mjtRndFlag.mjRND_WIREFRAME] = True
scene.flags[mujoco.mjtRndFlag.mjRND_SEGMENT] = True #随机颜色分割
scene.flags[mujoco.mjtRndFlag.mjRND_IDCOLOR] = True #segid
bunny_id = mujoco.mj_name2id(m, mujoco.mjtObj.mjOBJ_GEOM, "bunny")
'''--------场景渲染--------'''
# Close the viewer automatically after 30 wall-seconds.
start = time.time()
while viewer.is_running():
step_start = time.time()
mujoco.mj_step(m, d)
img = get_image(1024,640,mujoco.mjtStereo.mjSTEREO_SIDEBYSIDE)
# img = get_image(1024,640)
cv2.imshow("img",img)
cv2.waitKey(1)
# Pick up changes to the physics state, apply perturbations, update options from GUI.
viewer.sync()
# Rudimentary time keeping, will drift relative to wall clock.
time_until_next_step = m.opt.timestep - (time.time() - step_start)
if time_until_next_step > 0:
time.sleep(time_until_next_step)
<?xml version="1.0" encoding="utf-8"?>
<mujoco model="inverted_pendulum">
<compiler angle="radian" autolimits="true" />
<option timestep="0.01" gravity="0 0 -9.81" integrator="implicitfast" density="1.225"
viscosity="1.8e-5" />
<visual>
<global realtime="1" ipd="0.068" />
<quality shadowsize="16384" numslices="28" offsamples="4" />
<headlight diffuse="1 1 1" specular="0.5 0.5 0.5" active="1" />
<rgba fog="0 0 0 1" haze="1 1 1 1" />
</visual>
<asset>
<mesh name="tetrahedron" vertex="0 0 0 1 0 0 0 1 0 0 0 1" />
<texture type="skybox" file="../MJCF/asset/desert.png"
gridsize="3 4" gridlayout=".U..LFRB.D.." />
<texture name="plane" type="2d" builtin="checker" rgb1=".1 .1 .1" rgb2=".9 .9 .9"
width="512" height="512" mark="cross" markrgb=".8 .8 .8" />
<material name="plane" reflectance="0.3" texture="plane" texrepeat="1 1" texuniform="true" />
<material name="box" rgba="0 0.5 0 1" emission="0" />
<mesh file="asset/bunny.obj" />
</asset>
<worldbody>
<geom name="floor" pos="0 0 0" size="0 0 .25" type="plane" material="plane"
condim="3" />
<light directional="true" ambient=".3 .3 .3" pos="30 30 30" dir="0 -.5 -1"
diffuse=".5 .5 .5" specular=".5 .5 .5" />
<camera name="look_bunny" pos="0 -1 1" euler="0 0 0" mode="targetbody" target="bunny" ipd="0.068"/>
<body name="bunny" pos="0 -0.2 .1" euler="1.57 0 0">
<freejoint />
<geom name="bunny" type="mesh" mesh="bunny"/>
<camera name="bunny_eyes" pos="-0.075 0.13 0" euler="0 3.14 0" mode="fixed" ipd="0.068" focalpixel="1280 1024" sensorsize="2 2" resolution="1280 1024"/>
</body>
<body pos="-1 0 .5">
<freejoint />
<geom type="sphere" size="0.1" rgba=".5 0 0 1" />
</body>
<body pos="-0.5 0 .5">
<freejoint />
<geom type="box" size="0.1 0.1 0.1" material="box" />
</body>
<body pos="0 0 .5">
<freejoint />
<geom type="capsule" size="0.1 0.1" rgba="0 0 .5 1" />
</body>
<body pos=".5 0 .5">
<freejoint />
<geom type="cylinder" size="0.1 0.1" rgba=".5 .5 0 1" />
</body>
<body pos="1 0 .5">
<freejoint />
<geom type="ellipsoid" size="0.2 0.2 0.1" rgba="0 .5 .5 1" />
</body>
<body pos="1.5 0 .5">
<freejoint />
<geom type="ellipsoid" size="0.2 0.1 0.1" rgba=".5 0 .5 1" />
</body>
<body pos="2.0 0 .5">
<freejoint />
<geom type="mesh" mesh="tetrahedron" rgba=".5 .5 .5 1" />
</body>
</worldbody>
</mujoco>