datetime:2025/02/21 18:48
author:nzb
机械臂设置助手
概述
MoveIt 设置助手是一个图形用户界面,用于配置任何机器人,以便与 MoveIt 配合使用。 其主要功能是为机器人生成一个语义机器人描述格式(SRDF)文件,其中指定了MoveIt所需的其他信息,如规划组、末端效应器和各种运动学参数。 此外,它还能生成其他必要的配置文件,供 MoveIt 管道使用。 要使用 MoveIt 设置助手,您需要为机器人准备一个 URDF 文件
一旦有了 URDF 文件,您就可以打开 MoveIt 设置助手并导入 URDF。 本教程将通过一系列步骤指导您配置机器人的各个方面,如定义运动学结构、指定规划组和末端效应器以及碰撞检查相关设置。 要了解有关 URDF 和 SRDF 的更多信息,请参阅 URDF 和 SRDF 概述页面。
使用步骤
我们使用 moveit_resources_panda_description 包。如果您已完成 MoveIt 安装说明,此包应该已包含在您的工作区中。
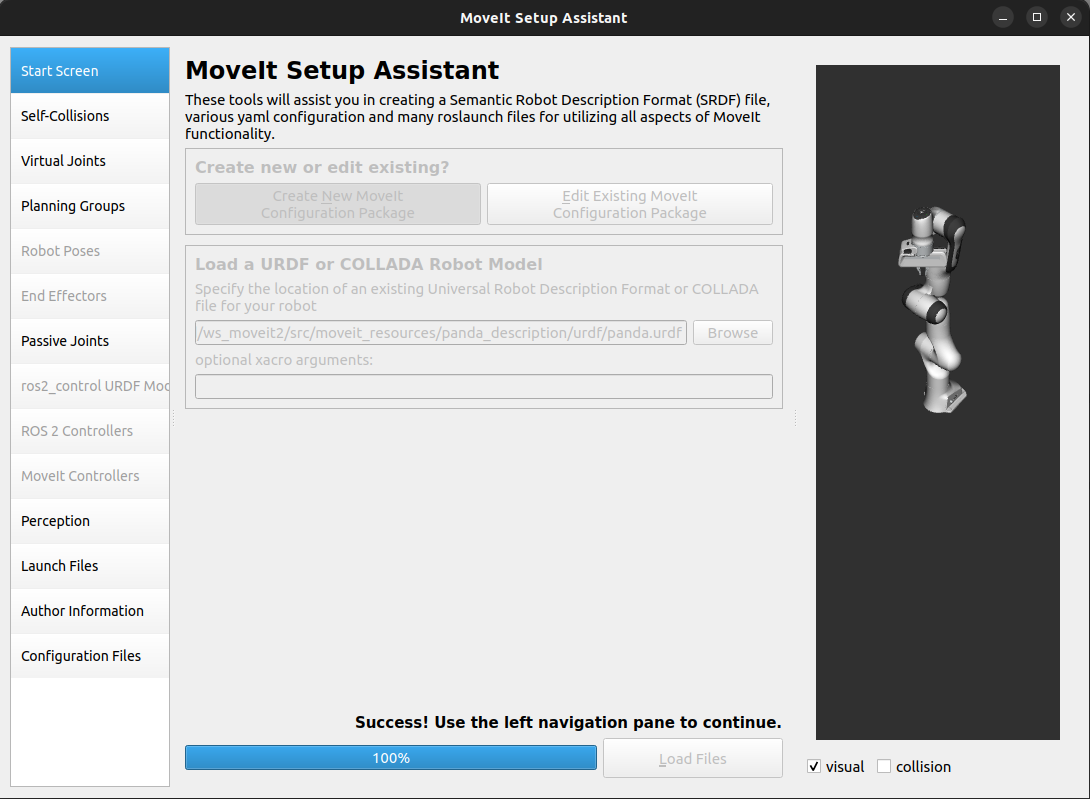
步骤1:开始
- 启动
ros2 launch moveit_setup_assistant setup_assistant.launch.py
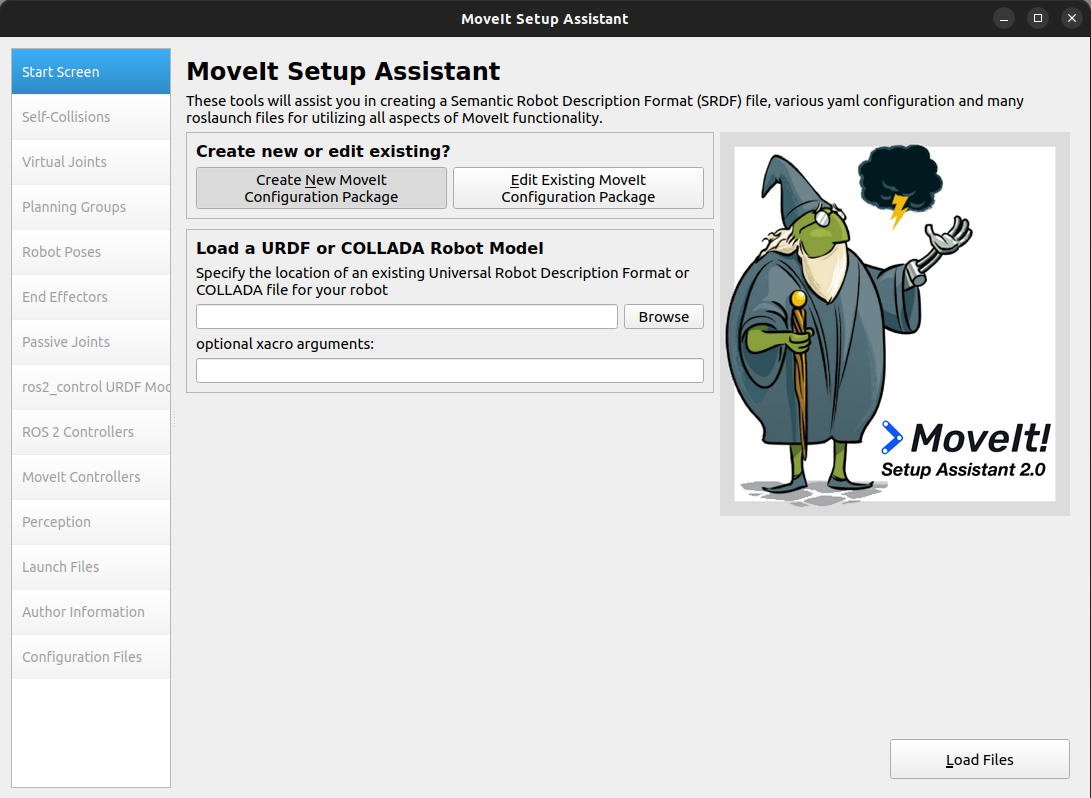
- 新建:
Create New MoveIt Configuration Package->Browse-> 选择urdf->Load Files - 编辑已有的包:选择包文件夹
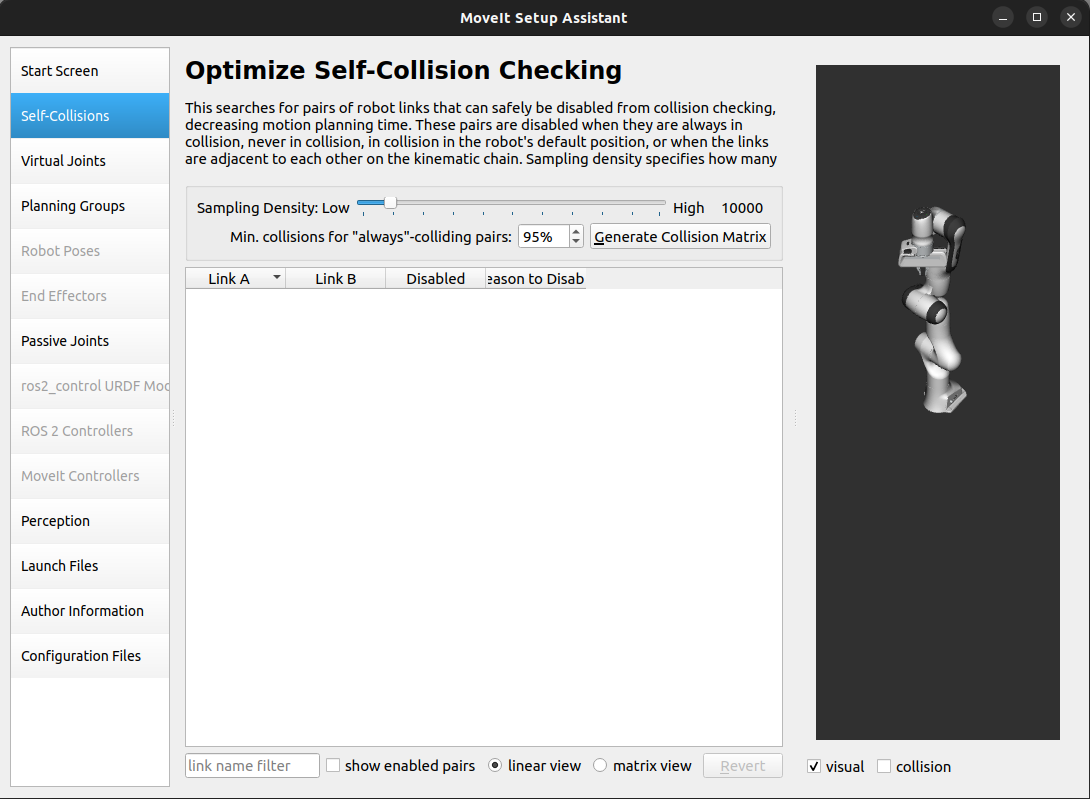
步骤2:生成自碰撞矩阵
默认的 "自碰撞矩阵 "生成器可通过禁用机器人上已知安全的链接对的碰撞检查,帮助减少运动规划时间。 具体方法是确定哪些链接对始终处于碰撞状态、从不处于碰撞状态、在机器人默认位置处于碰撞状态或在运动学链上彼此相邻。
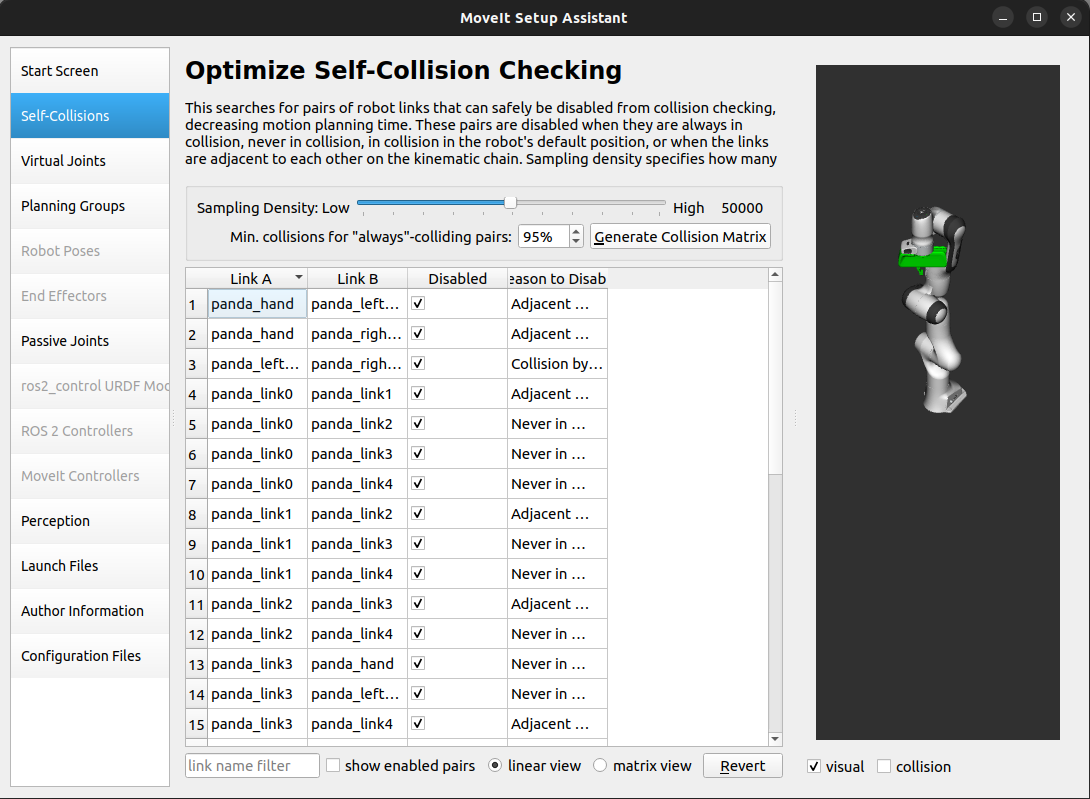
您可以设置抽样密度,它决定了对多少个随机机器人位置进行自碰撞检查。 虽然生成器默认检查 10,000 个随机位置,但建议使用最大采样密度值,以确保获得更精确的结果。 碰撞检查是并行进行的,以减少生成碰撞矩阵的整体处理时间。
要生成碰撞矩阵,请选择 MoveIt 设置助手左侧的 "Self-Collisions" 窗格,并调整自碰撞采样密度。 然后点击 "Generate Collision Matrix"按钮启动计算。 设置助手需要几秒钟来计算自碰撞矩阵,其中包括检查可以安全禁用碰撞检查的链路对。
计算完成后,结果将显示在主表中。 该表显示了通过碰撞检查确定为安全或不安全的链路对。 安全禁用的链路用复选标记标出。 您可以根据需要手动调整复选标记,以启用或禁用特定链路对的自碰撞检查。
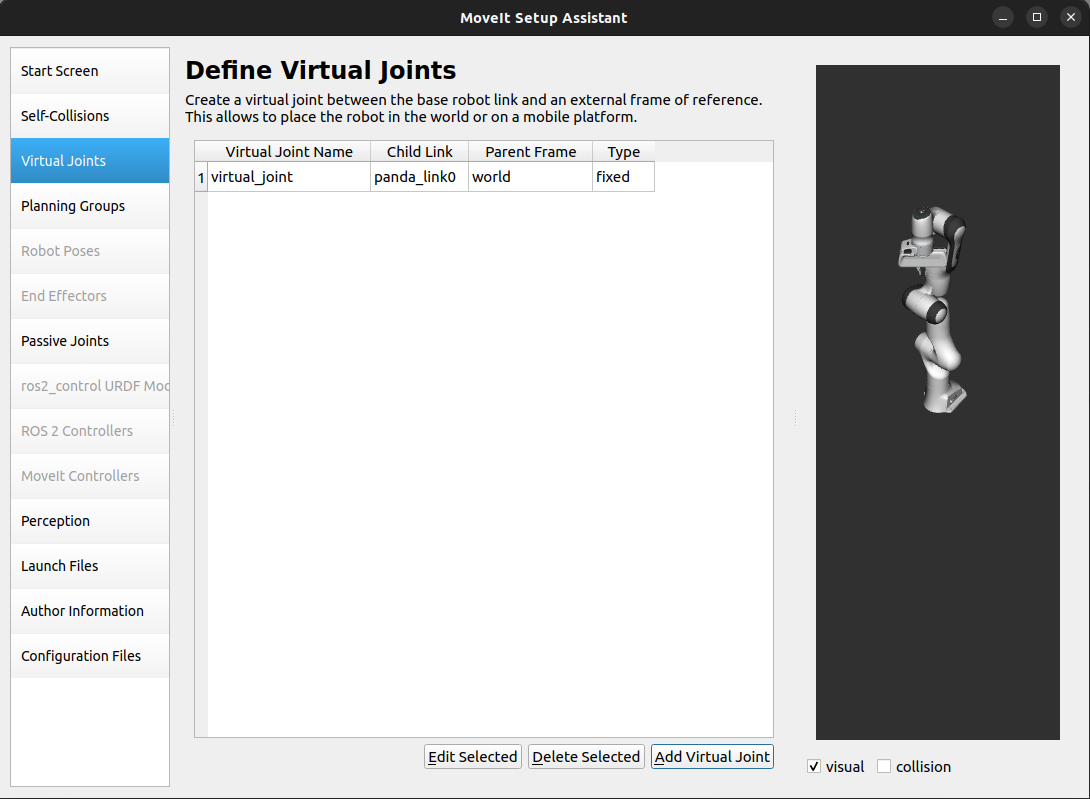
步骤3:添加虚拟关节
虚拟关节主要用于连接机器人与世界。 熊猫机械臂是一个固定基座的机械手,定义一个固定虚拟关节是可选的。 不过,我们将定义一个固定虚拟关节,将机械臂的 panda_link0 连接到世界帧。 这个虚拟关节表示手臂的基座在世界帧中保持静止。
- 点击左侧
Virtual Joints->Add Virtual Joint - 设置关节名称
virtual_joint. - 设置子帧
panda_link0和父帧world - 设置类型为
fixed - 点击
Save保存
虚拟关节对具有移动基座的机器人(如移动机械手)尤其有益。 虚拟关节可以模拟机器人底座的运动,这对运动规划和控制至关重要。 例如,虚拟平面关节可用于连接机器人底座框架和里程测量框架,从而有效地表示机器人在环境中的运动。
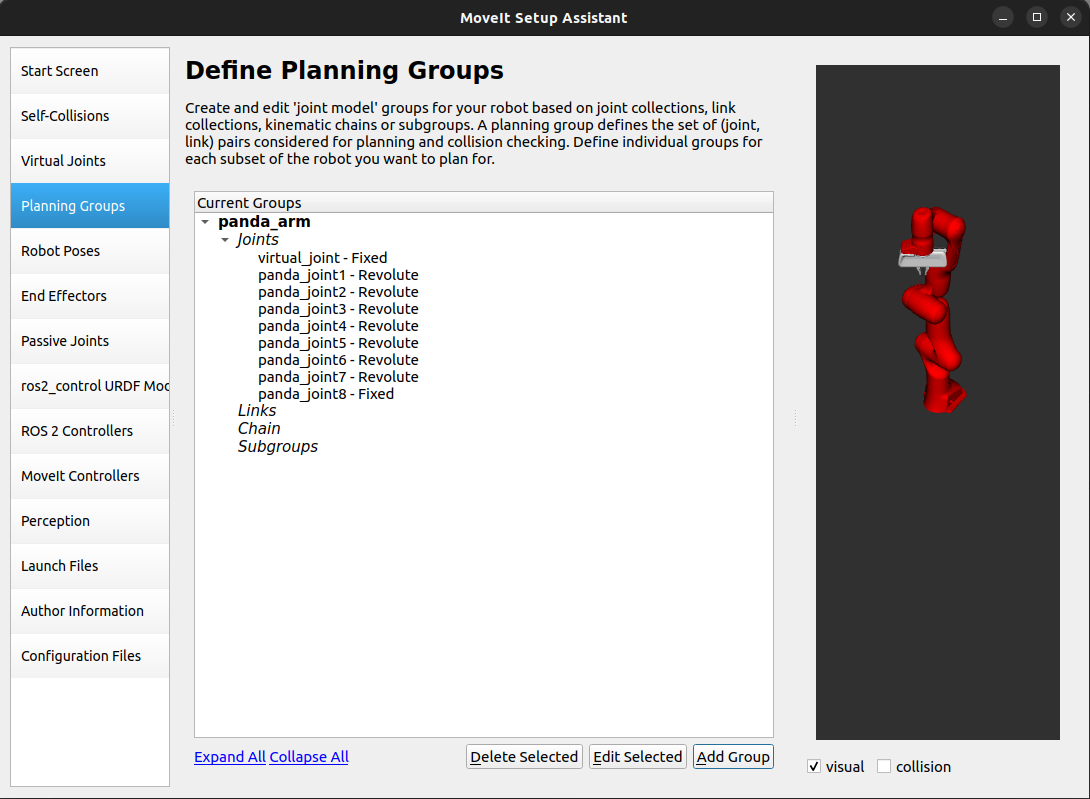
步骤4:设置规划组
MoveIt 中的规划组从语义上描述了机器人的不同部分,如手臂或末端效应器,以方便进行运动规划。
移动组可配置为与机器人上的特定运动链相对应,运动链是一组链接和关节,定义了从机器人底座到末端效应器的转换序列。 例如,可以定义一个移动组来表示机器人的手臂,它由移动手臂所需的所有链接和关节组成。
移动组也可以由机器人上对应的链接或关节集来表示。 例如,可以定义一个移动组来表示机器人的抓手,该组由所有必要的链接或关节组成,它们一起移动以实现抓手的打开或关闭动作。
- 点击左侧
Planning Groups->Add Group
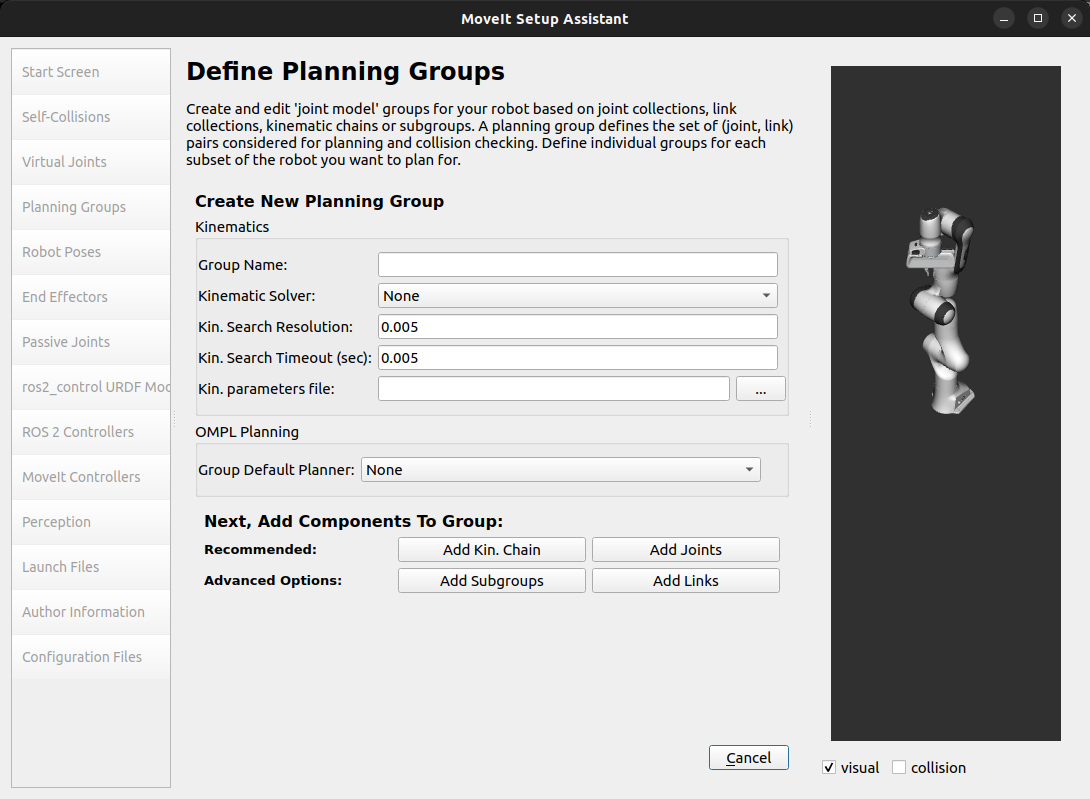
- 添加手臂为一个规划组
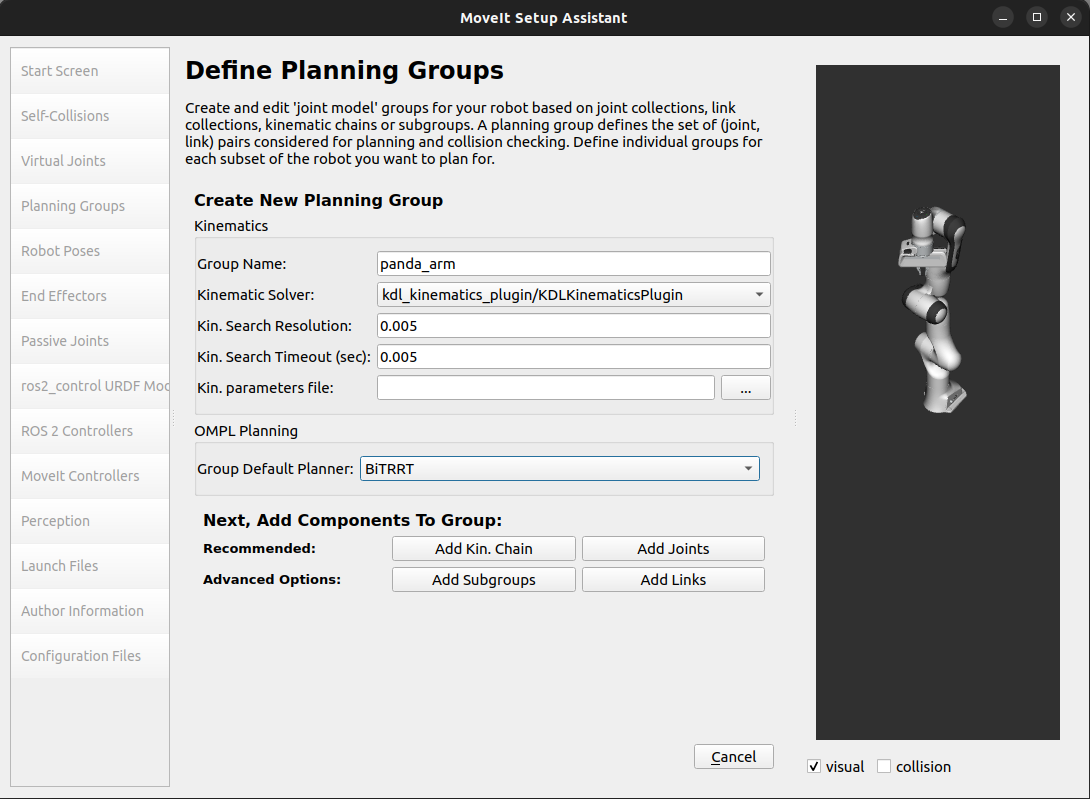
- 设置组名称
panda_arm - 选择
kdl_kinematics_plugin/KDLKinematicsPlugin作为运动学求解器,这是Moveit默认的,你也可以选择IKFast或pick_ik. Kin. Search Resolution和Kin. Search Timeout保持默认值
- 设置组名称
- 现在,点击
Add Joints按钮。 你将看到左侧的关节列表。 您需要选择属于手臂的所有关节,并将它们添加到右侧。 关节将按照内部树形结构中的存储顺序排列。 这样就可以方便地选择一系列关节。- 点击
virtual_joint,按住键盘上的Shift键,然后点击panda_joint8。 现在点击>按钮,将这些关节添加到右侧的 "已选关节 "列表中。
- 点击
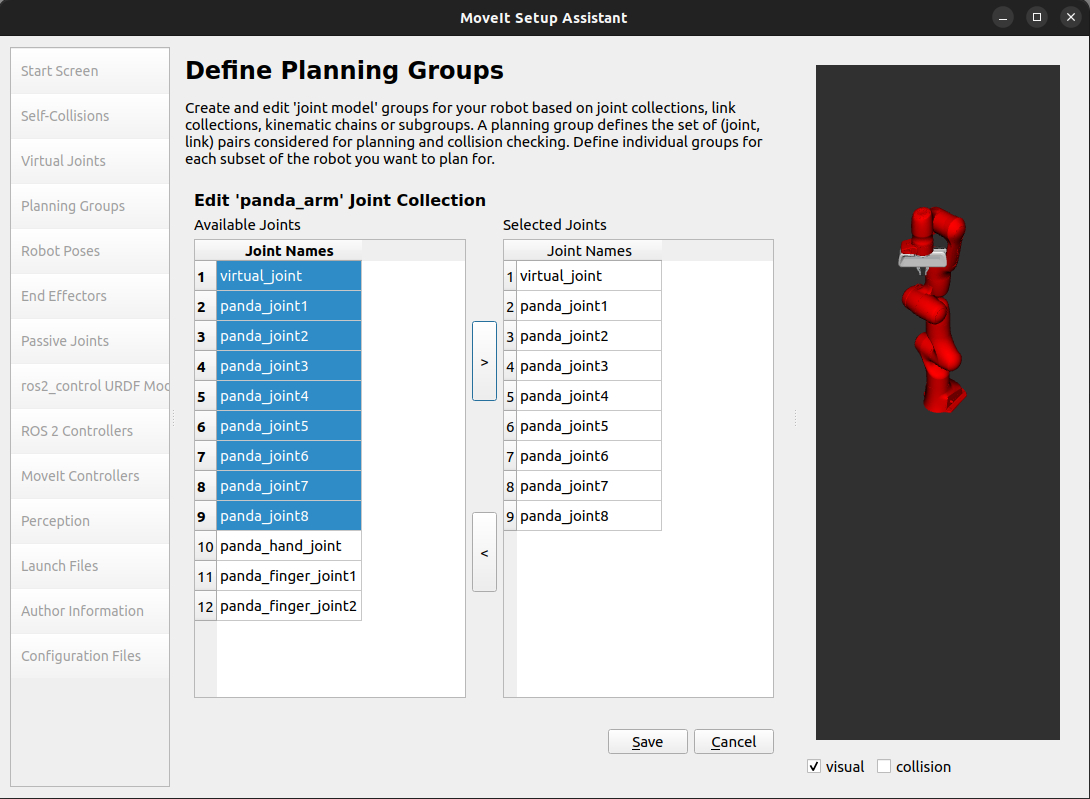
- 点击
Save保存
- 添加末端执行器为一个规划组
末端执行器并不是由连接成串行链的链节组成的。 因此,该组的运动学求解器
Kinematic Solver应设置为 "无"。
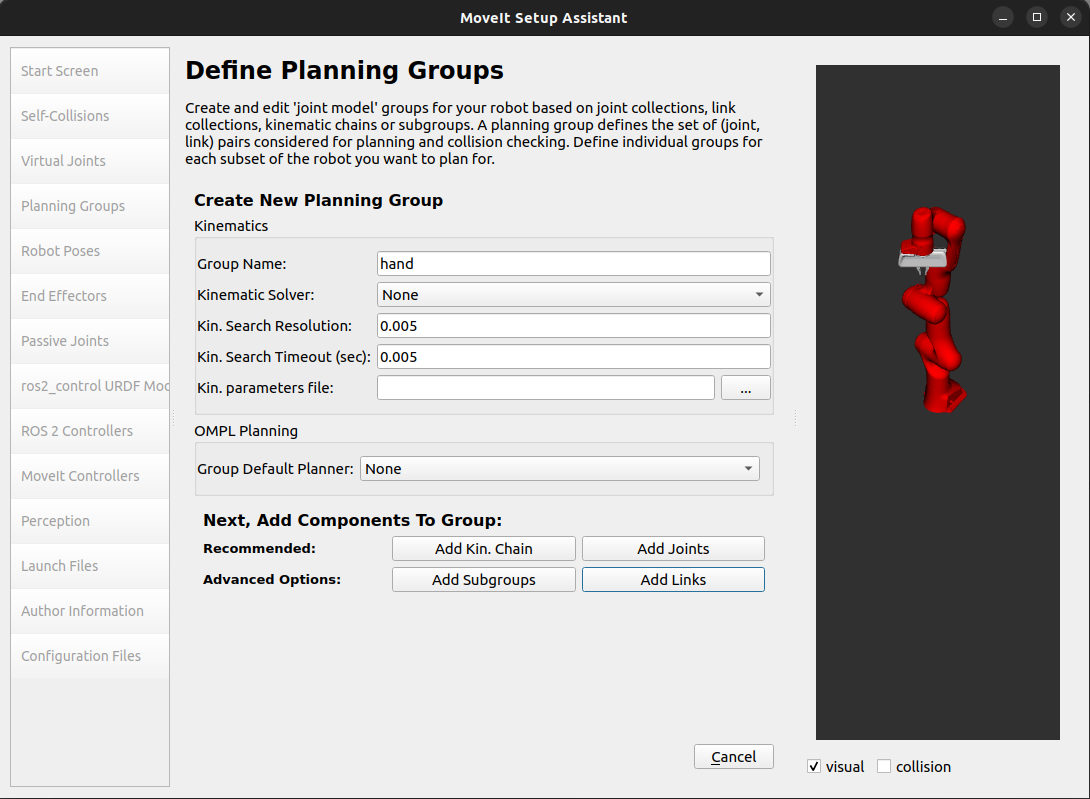
- 末端执行器设置步骤
- 点击
Add Groups按钮。 - 设置组名称
hand。 - 保持
Kinematic Solver为默认值None。 - 保持
Kin. Search Resolution和Kin. Search Timeout为默认值。 - 点击
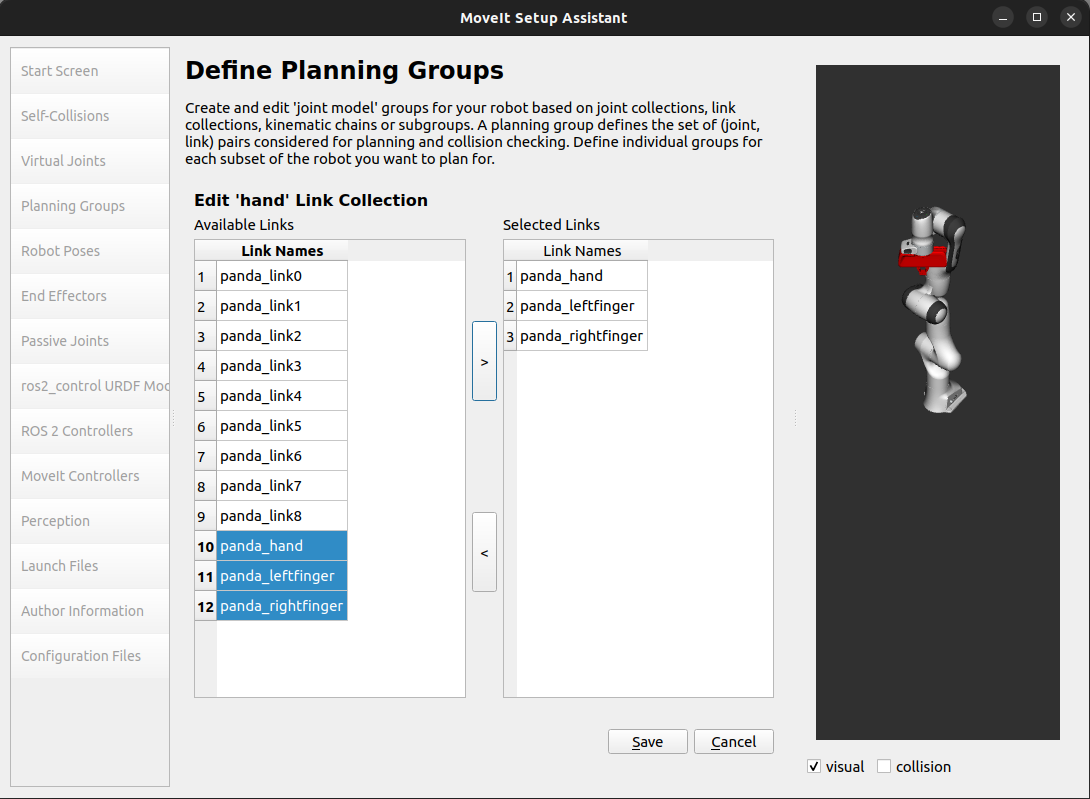
Add Links按钮。 - 选择
panda_hand,panda_leftfinger和panda_rightfinger,并将它们添加到右侧的Selected Links列表中。 - 点击
Save保存。
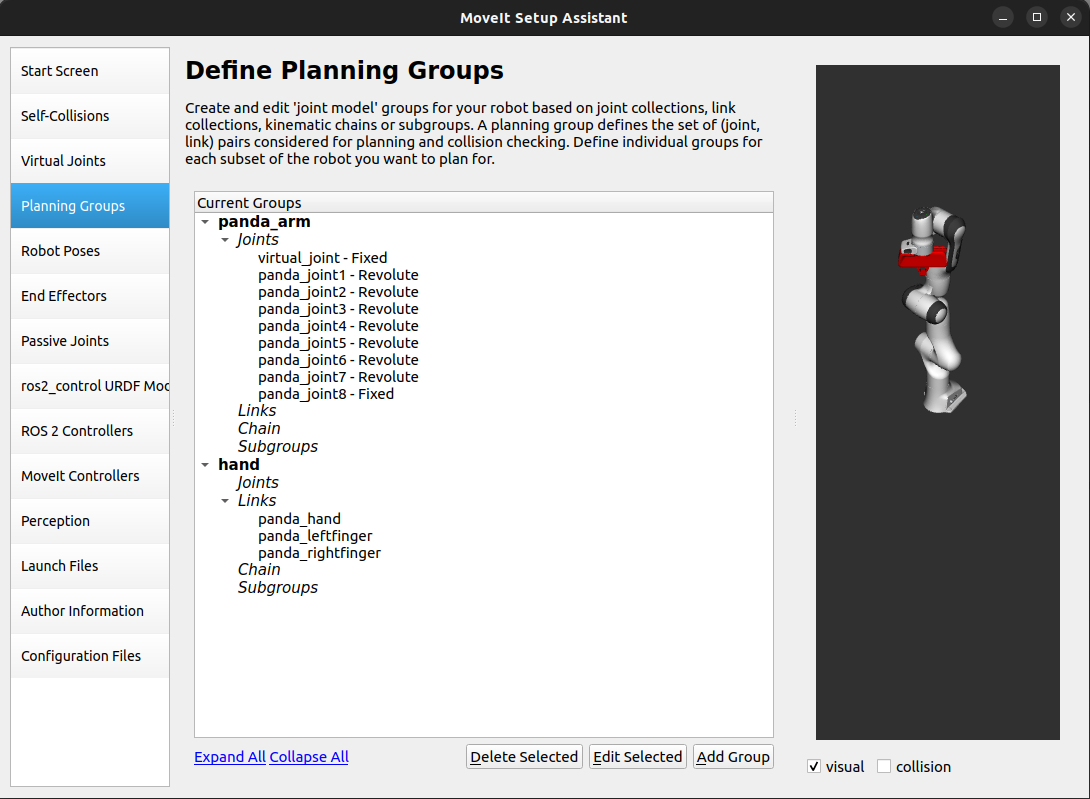
- 点击
- 手臂和末端执行器都添加完成后,效果如下
通过添加子组(
Add Subgroup)选项,可以建立由其他移动组组成的移动组。 在需要同时控制多个移动组的情况下,例如在规划多臂系统的同步运动时,这样做会很有帮助。
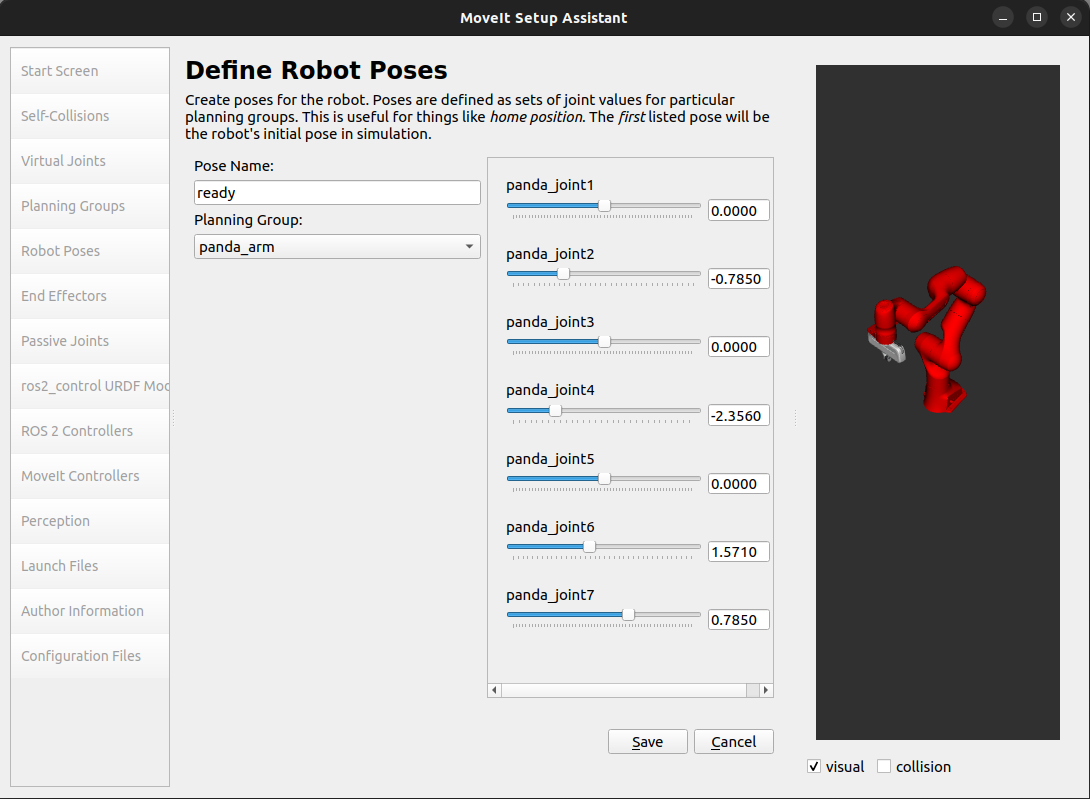
步骤5:添加机器人位姿
设置助手允许您在机器人配置中添加预定义姿势,这对于定义特定的初始姿势或准备姿势非常有用。 之后,可以使用 MoveIt API 命令机器人移动到这些姿势。
- 点击左侧
Robot Poses - 点击
Add Pose,设置名称为ready,并设置关节值为{0.0, -0.785, 0.0, -2.356, 0.0, 1.571, 0.785},- 注意位姿是与特定规划组关联的。 您可以为每个组保存单独的姿势。点击Save保存重要提示:尝试移动所有关节。 如果您的 URDF 中的关节限制有问题,您应该可以在这里立即看到。
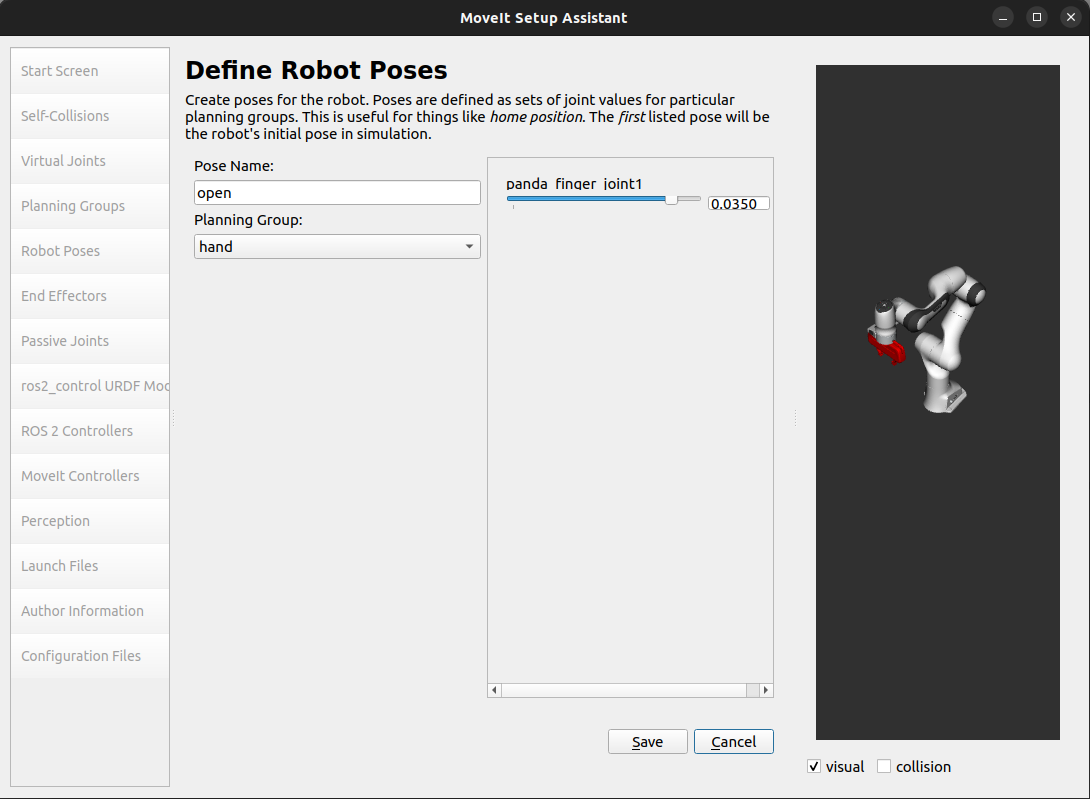
- 添加一个末端执行器位姿,选择
hand规划组,设置名称为open,并设置关节值为{0.035},点击Save保存
- 添加一个末端执行器位姿,选择
hand规划组,设置名称为close,并设置关节值为{0.0},点击Save保存
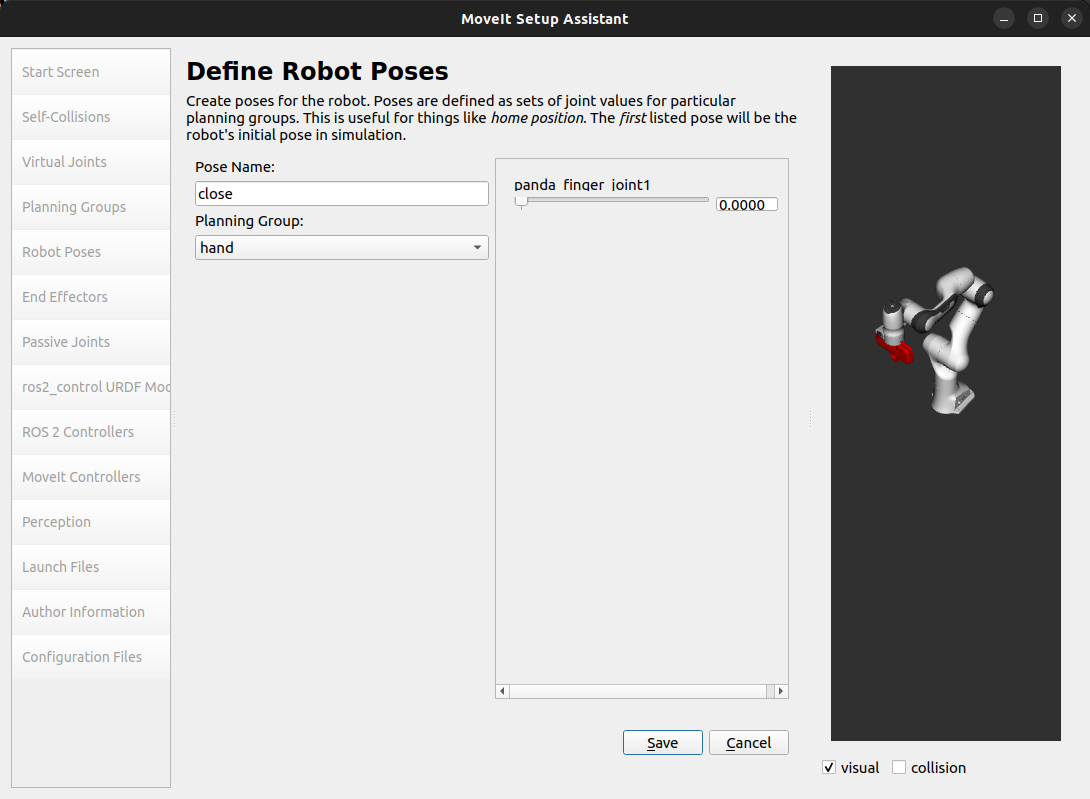
只有
panda_finger_joint1出现在列表中,因为panda_finger_joint2模拟了它的值。
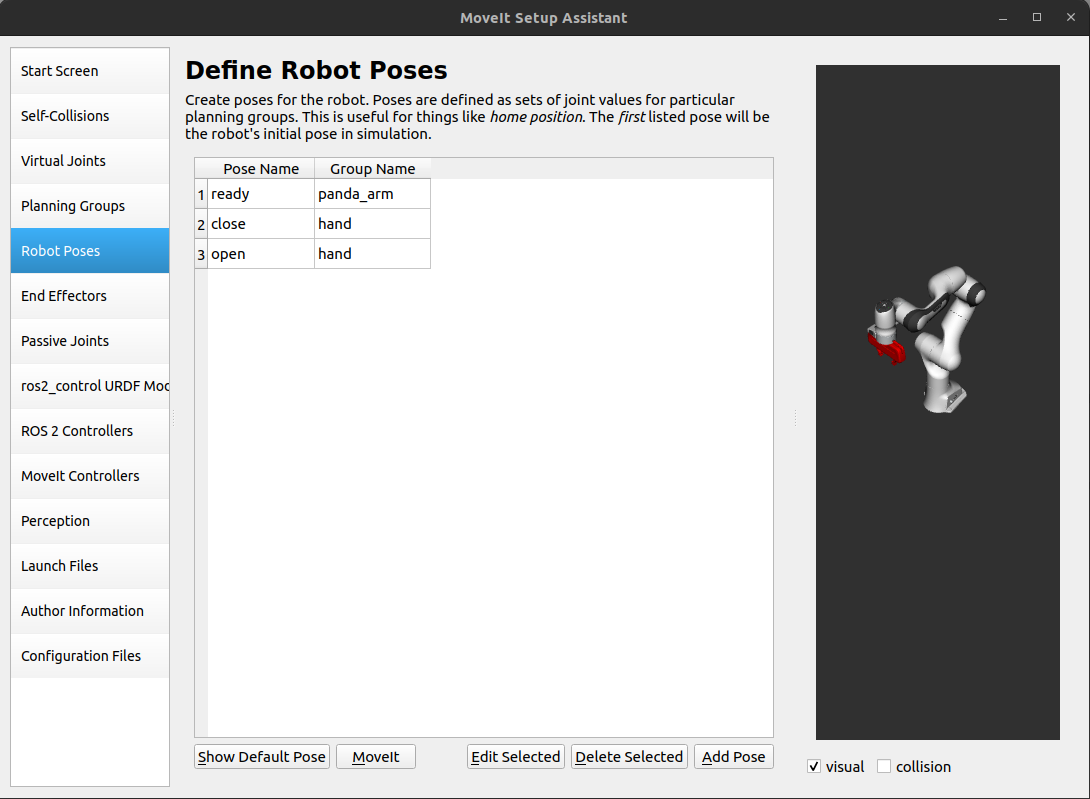
- 添加完成后,效果如下
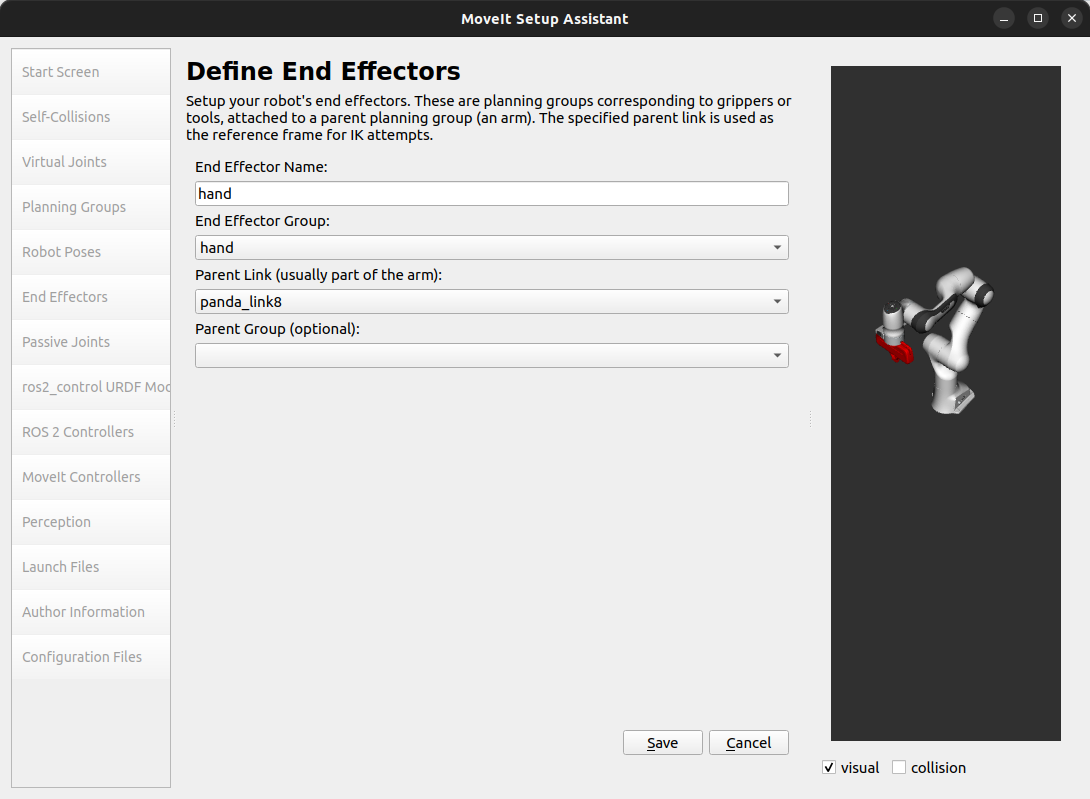
步骤6:标签末端效应器
既然我们已经将熊猫的手添加为一个移动组,那么我们就可以将它指定为终端执行器。 将一个移动组指定为末端执行器后,MoveIt 就可以对其执行某些特殊操作。 例如,在执行拾放任务时,末端执行器可用于将物体附着在手臂上。
- 点击
End Effectors标签页 - 点击
Add End Effector按钮 - 设置名称为
hand - 选择
hand作为末端执行器组 - 选择
panda_link8作为末端执行器父链接 Parent Group保持为空- 点击
Save保存
步骤7:添加被动关节
被动关节窗格用于指定机器人中可能存在的任何被动关节。 这些关节是无驱动的,也就是说无法直接控制。 指定被动关节非常重要,这样规划人员才能意识到它们的存在,并避免为它们进行规划。 如果规划器不知道被动关节的存在,它们可能会尝试规划涉及移动被动关节的轨迹,这将导致规划无效。 熊猫机器人手臂没有任何被动关节,因此我们将跳过这一步。
步骤8: ros2_control修改 URDF
ros2_control URDF 修改窗格有助于修改机器人 URDF,以便与 ros2_control 配合使用。
如果机器人的
URDF/xacro已包含ros2_control.xacro,则可跳过此步骤。
此修改为已定义的移动组中的每个关节添加了命令和状态接口标签。 命令接口(command_interface)标签定义了可用于控制关节的命令类型。 state_interface 标签定义了可从关节读取的状态信息类型。
在默认情况下,MoveIt 设置助手会选定命令界面中的位置以及状态界面的位置和速度,我们将继续进行此设置。
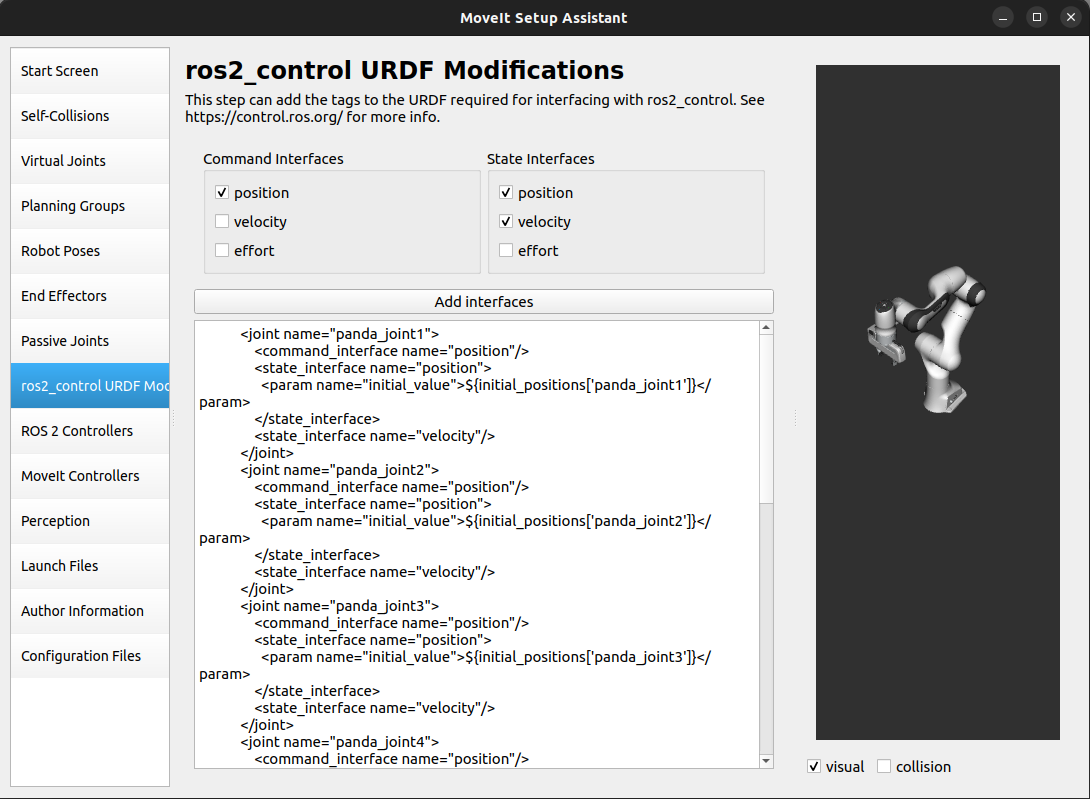
如有必要,为机器人关节选择所需的命令或状态接口,然后单击 "Add Interfaces"按钮。
步骤9:ROS2 Controllers
ROS2 Control是一个用于实时控制机器人的框架,旨在管理和简化新机器人硬件的集成。 更多详情,请参阅 ros2_control 文档。 ROS2 控制器窗格可用于自动生成模拟控制器,以驱动机器人关节。
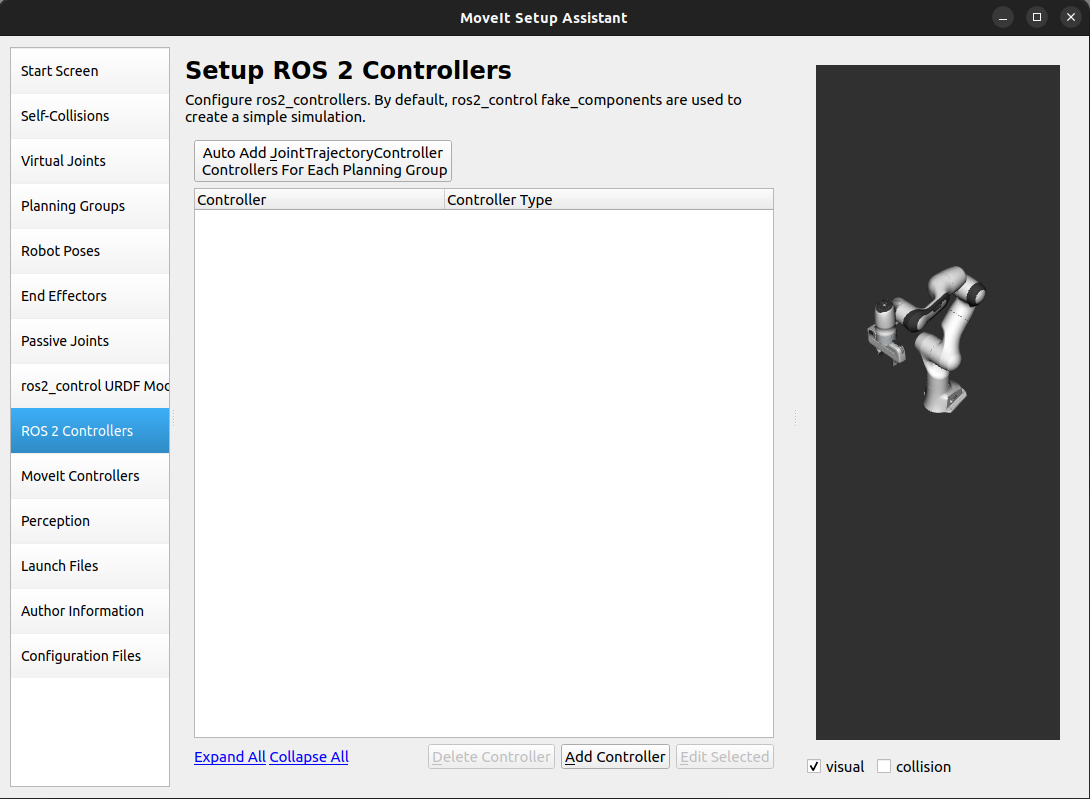
- 点击
ROS 2 Controllers标签页 - 点击
Add Controller按钮 - 设置名称为
panda_arm_controller - 选择
joint_trajectory_controller/JointTrajectoryController作为控制类型
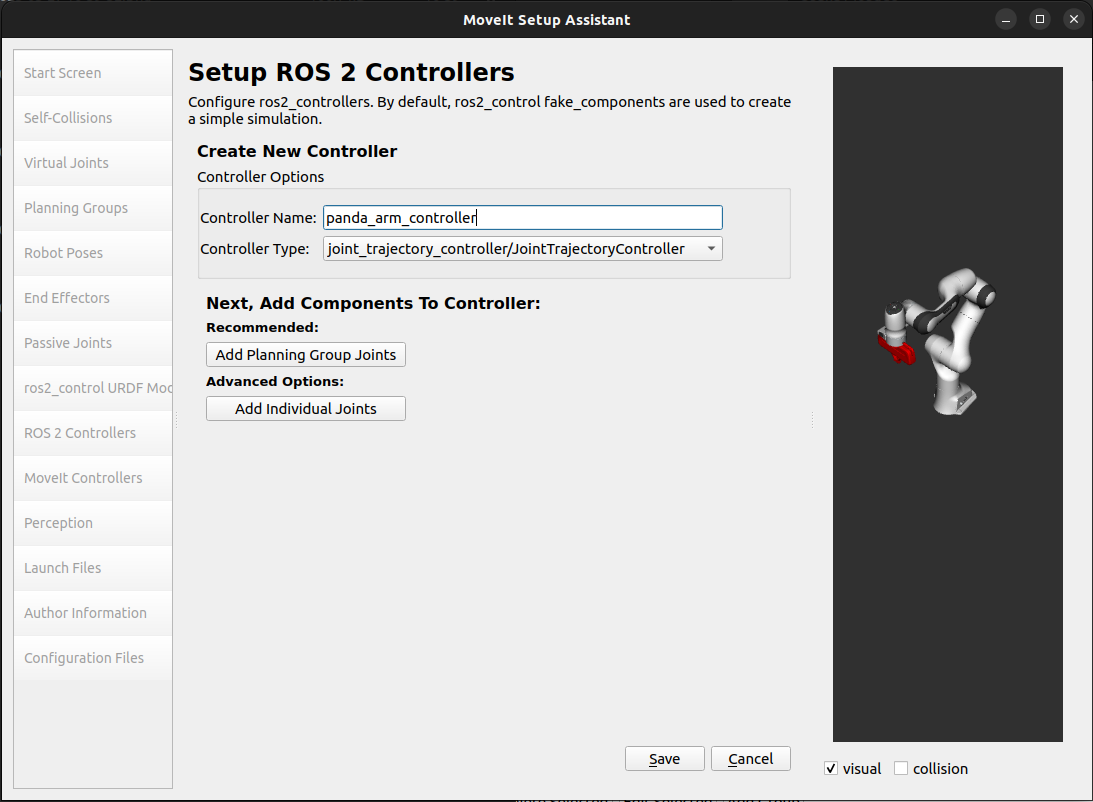
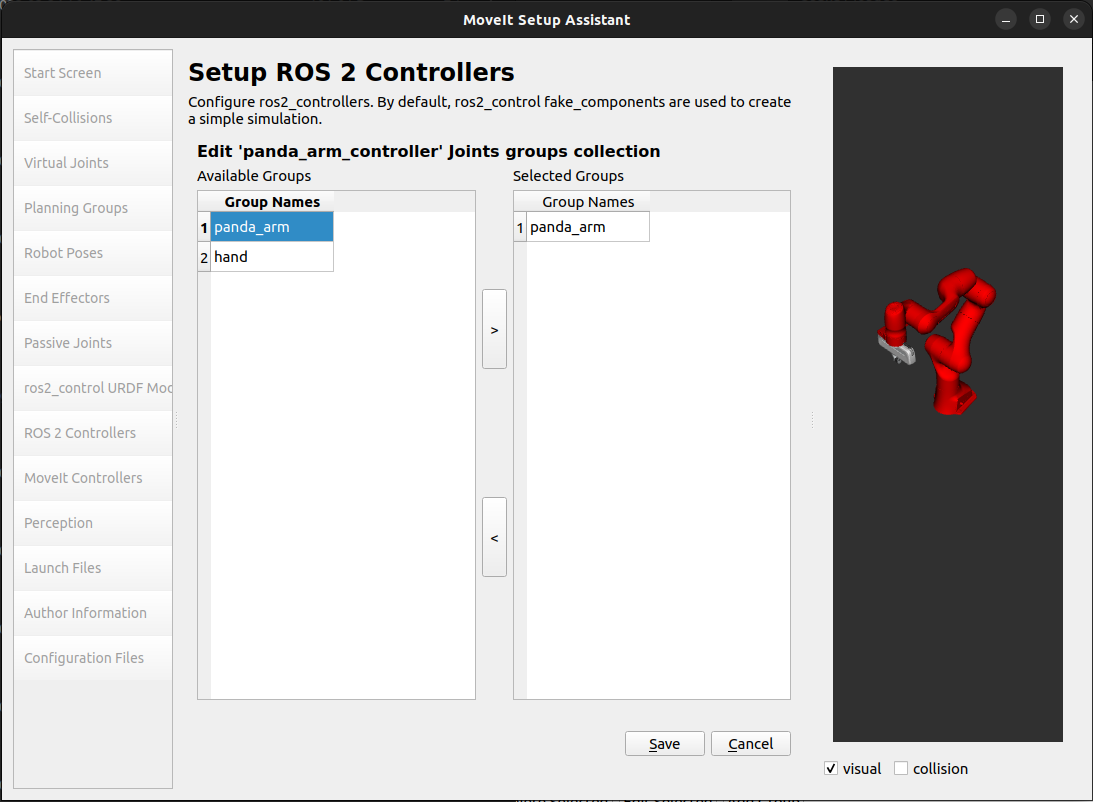
- 接下来,我们需要选择控制器关节。关节可以单独添加,也可以通过移动组添加。
- 点击
Add Planning Group Joints - 选择
panda_arm组,点击>添加到Selected Groups - 点击
Save保存
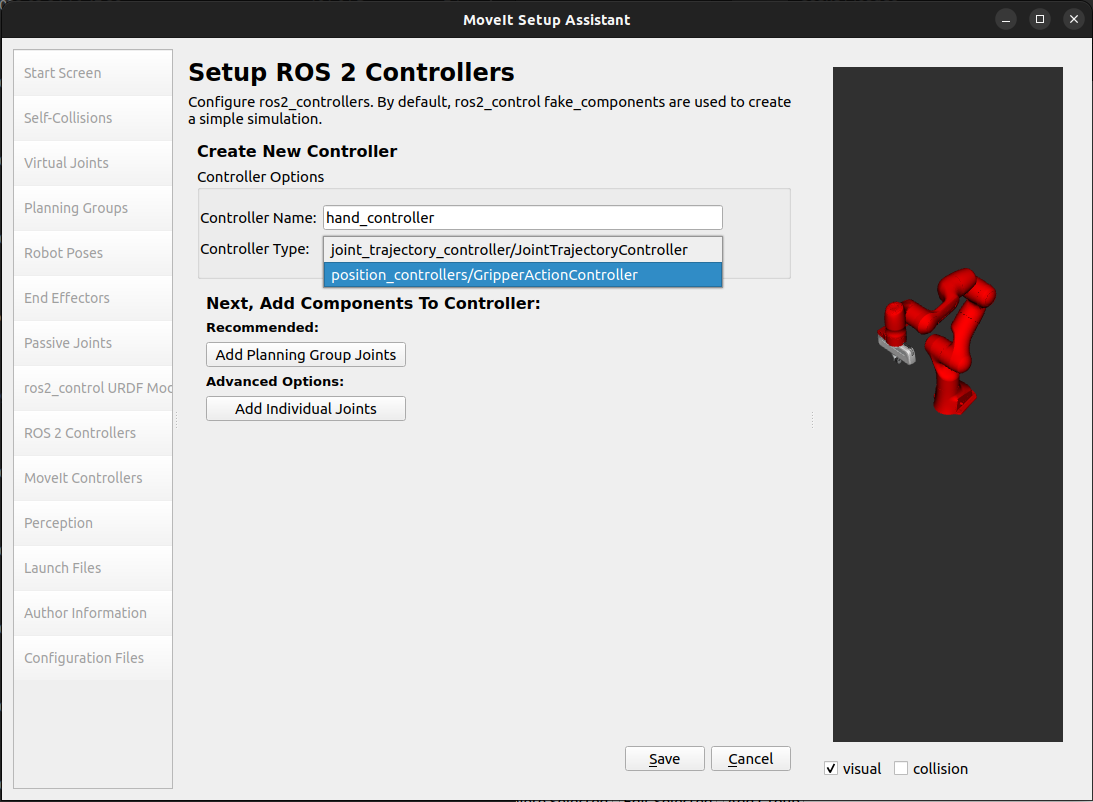
- 添加手控制器
- 跟手臂一样,但是控制器类型选择
position_controllers/GripperActionController
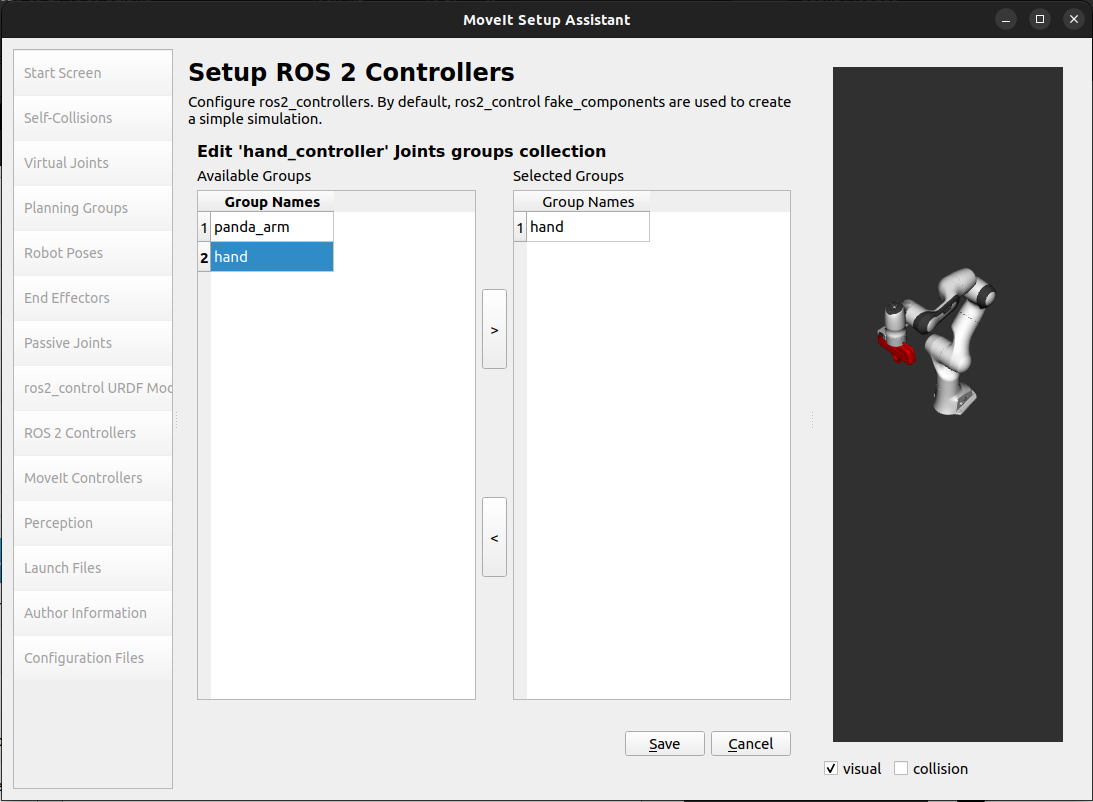
- 选择
hand组,点击>添加到Selected Groups - 点击
Save保存
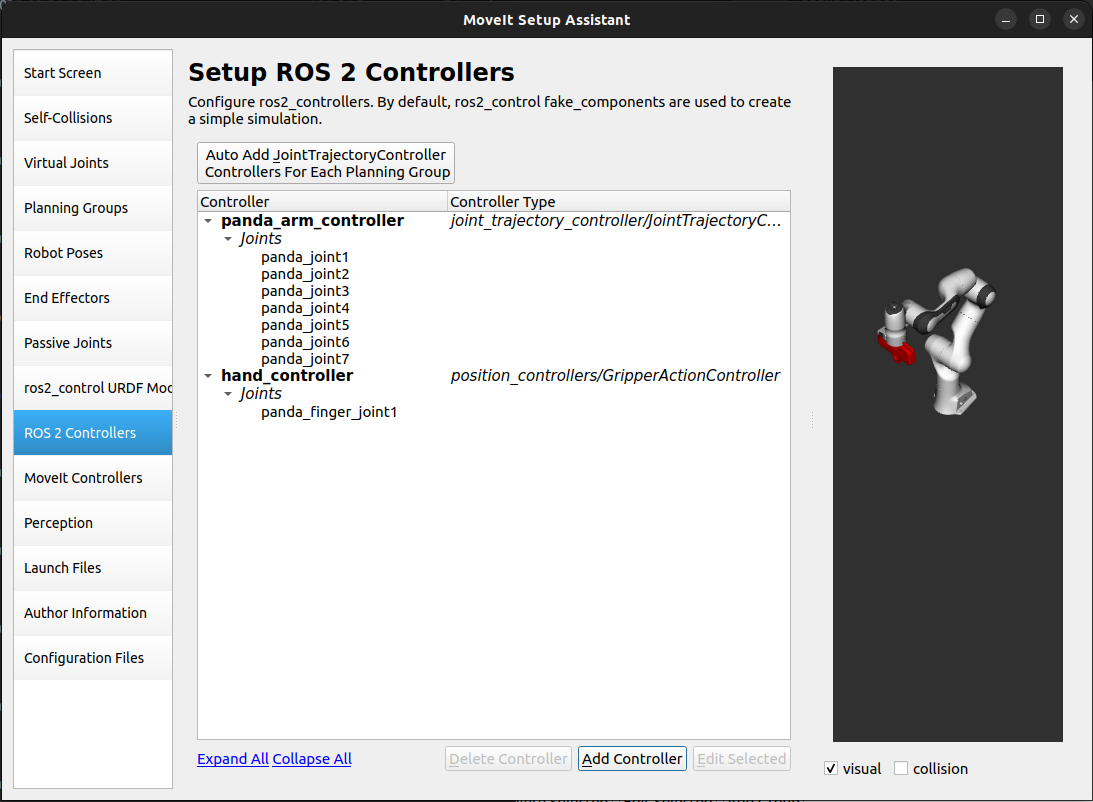
- 最终效果
步骤10:MoveIt Controllers
MoveIt 需要带有 FollowJointTrajectoryAction 接口的轨迹控制器来执行计划轨迹。 该接口将生成的轨迹发送至机器人 ROS2 控制器。
MoveIt Controllers 面板可用于自动生成 MoveIt 控制器管理器使用的控制器。 确保控制器名称与之前 ROS2 控制器步骤中配置的名称一致。 此步骤的用户界面与前一步类似。
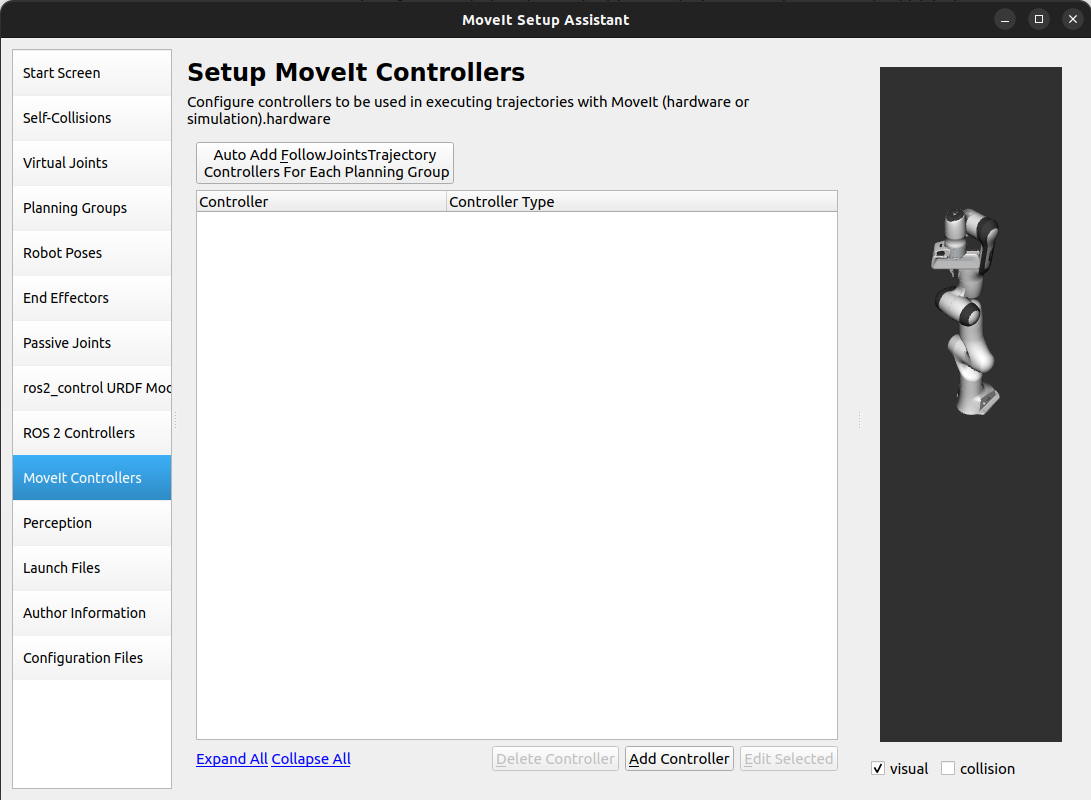
- 添加手臂控制器
- 点击
MoveIt Controllers面板 - 点击
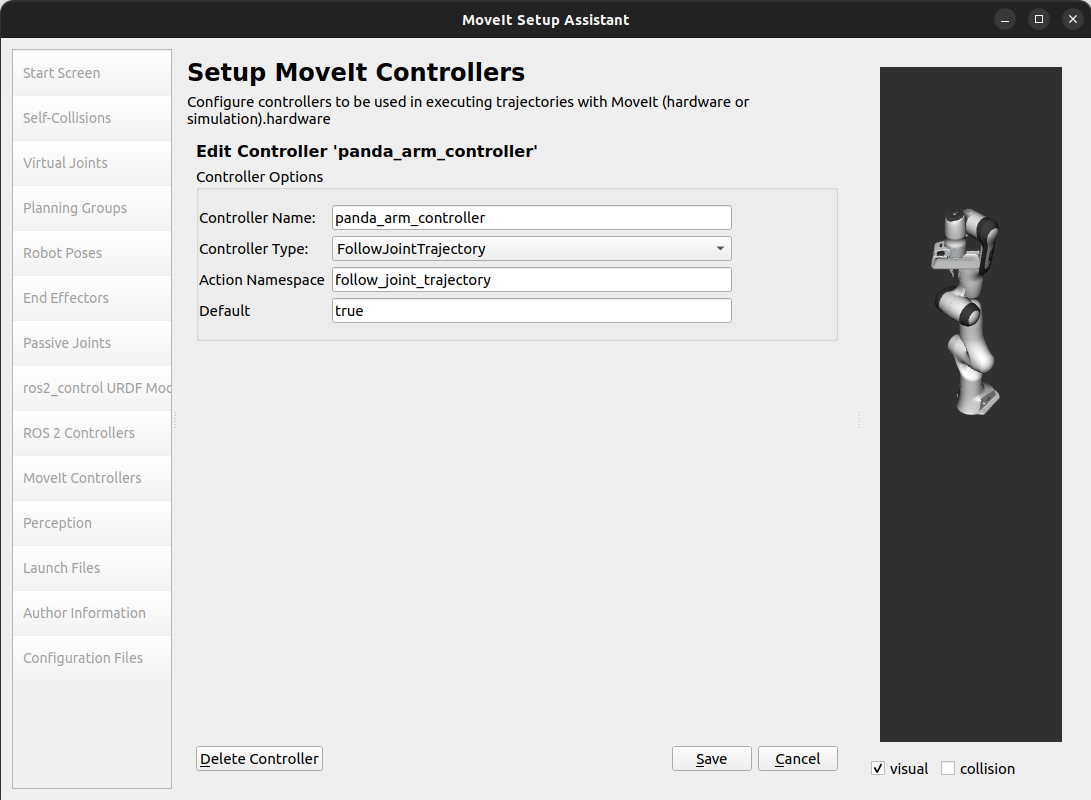
Add Controller按钮 - 设置
Controller Name为panda_arm_controller - 选择
FollowJointTrajectory作为控制器类型 - 点击
Add Planning Group Joints(也可单独添加关节) - 选择
panda_arm组,点击>添加到Selected Groups - 点击
Save保存
- 点击
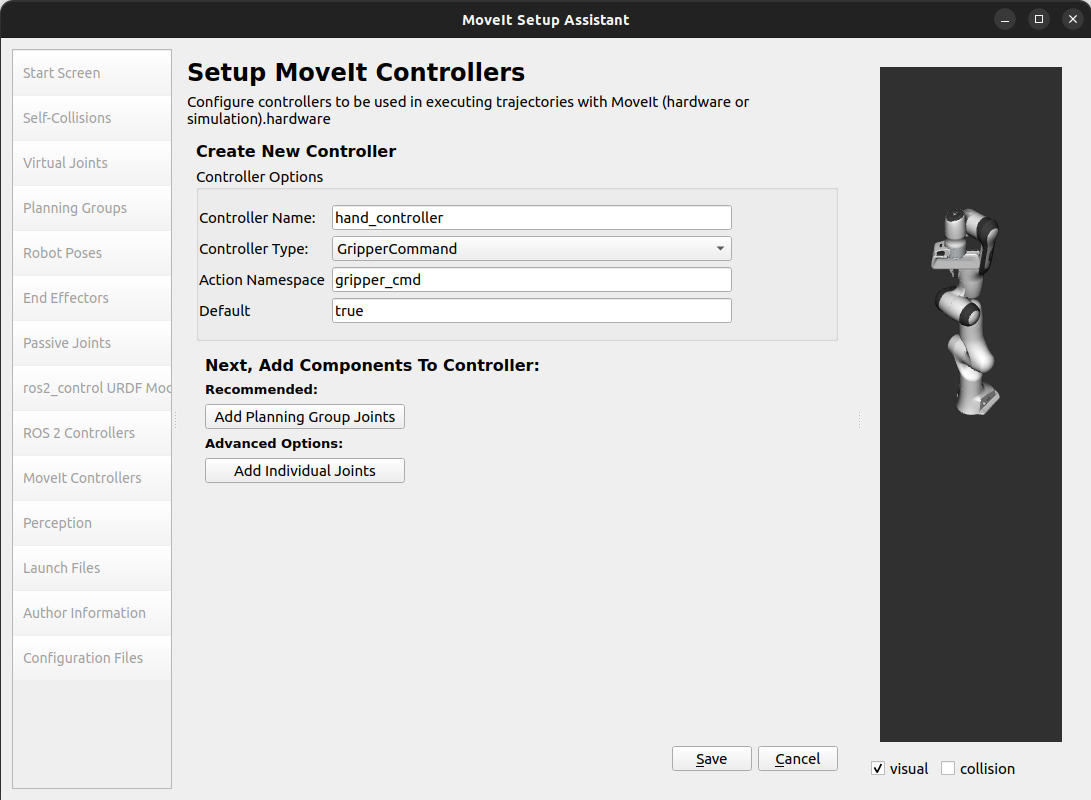
- 添加手控制器
- 点击
Add Controller按钮 - 设置
Controller Name为hand_controller - 选择
Gripper Command作为控制器类型 - 点击
Add Planning Group Joints(也可单独添加关节) - 选择
hand组,点击>添加到Selected Groups - 点击
Save保存
- 点击
- 最终效果

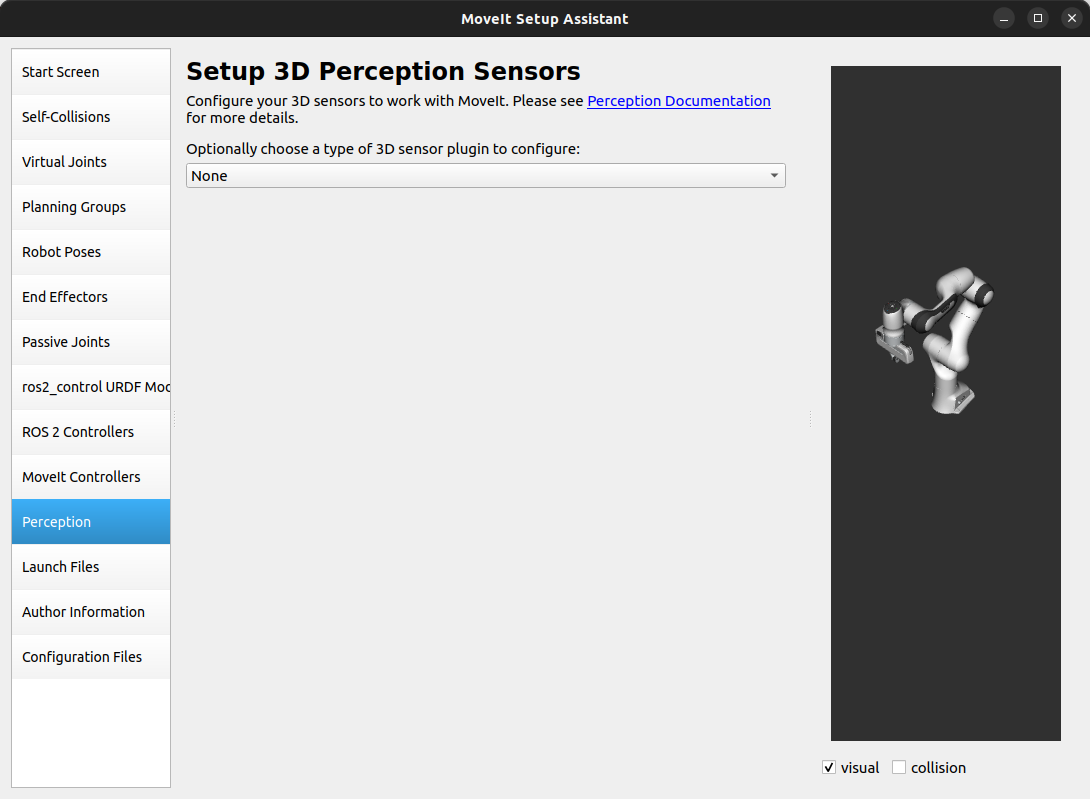
步骤11:感知
配置助手中的 "感知 "选项卡用于配置机器人使用的 3D 传感器的设置。 这些设置保存在名为 sensors_3d.yaml 的 YAML 配置文件中。 如果不需要 sensors_3d.yaml,请选择 "无 "并进入下一步。
要生成 point_cloud 配置参数,请参阅下面的示例:
该配置不适用于熊猫机械臂,因为它没有头戴式
kinect摄像头。
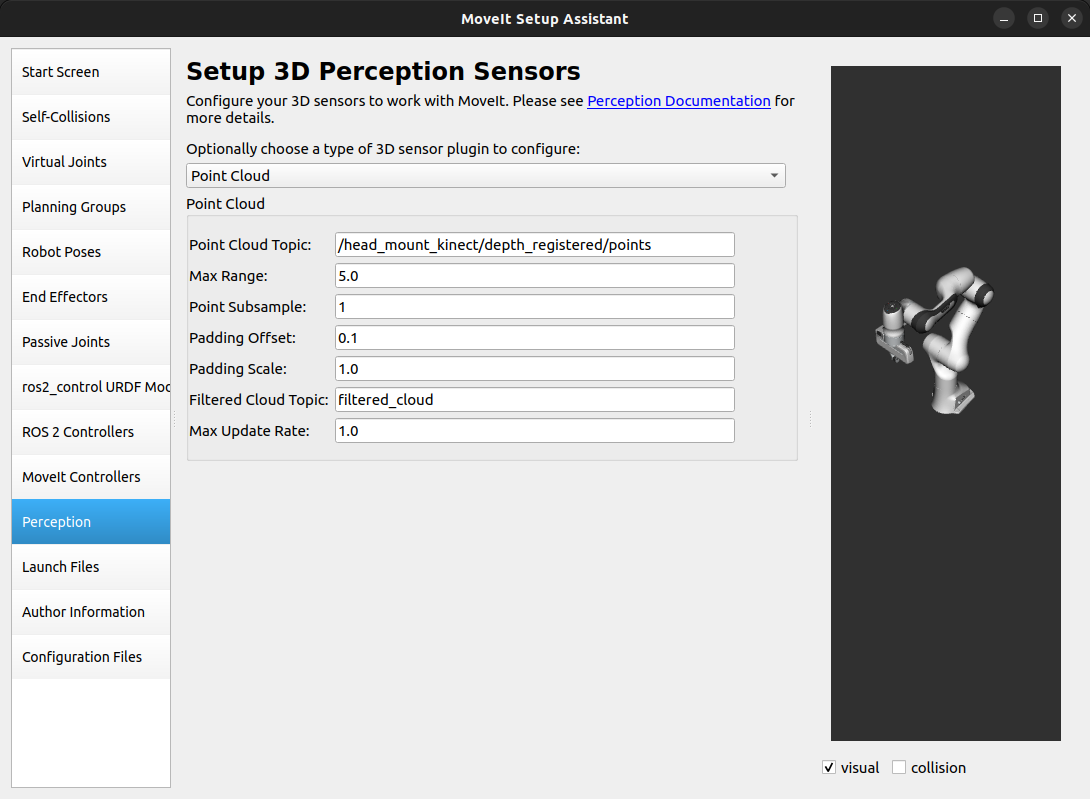
有关这些参数的更多详情,请参阅 Perception Pipeline 教程。
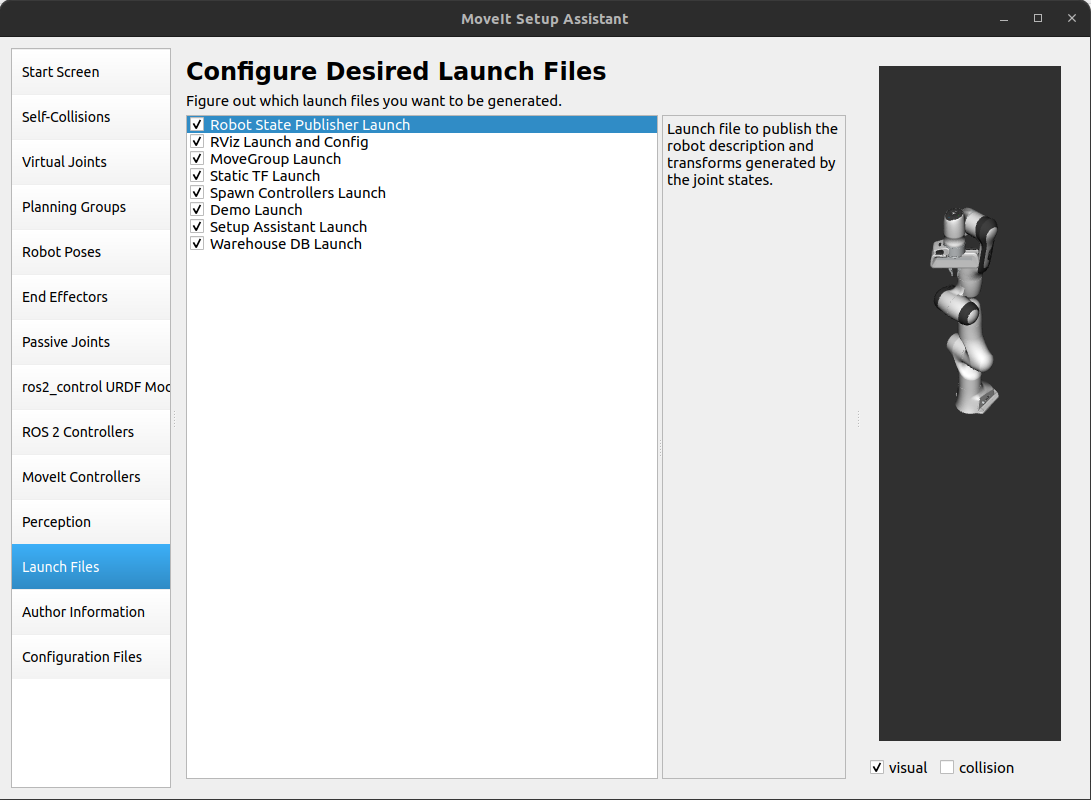
步骤12:启动文件
在 "启动文件 "窗格中,您可以查看将生成的启动文件列表。 默认选项通常就足够了,但如果您对自己的应用程序有特殊要求,可以根据需要进行更改。 点击每个文件可查看其功能摘要。
步骤13:添加作者信息
Colcon 要求提供作者信息以便出版。 点击 "作者信息 "窗格,输入您的姓名和电子邮件地址。
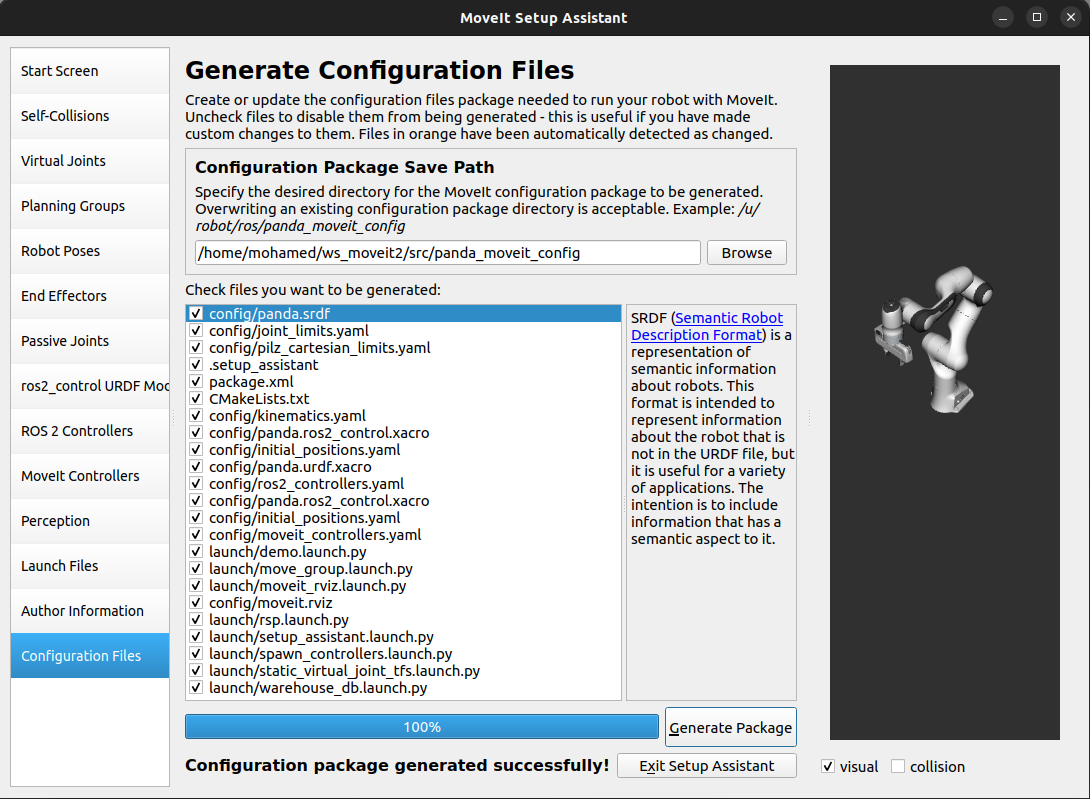
步骤14:生成配置文件
点击 "
Configuration Files"窗格。 为即将生成的包含新配置文件的ROS2软件包选择位置和名称。 点击 "Browse",选择一个合适的位置(例如,你的 ROS2 工作区的 src 目录),点击 "Create Folder",将其命名为panda_moveit_config,然后点击 "打开"。 所有生成的文件将直接进入你选择的目录。单击 "
Generate Package"按钮。 现在,安装助手将在您选择的目录下生成一组启动和配置文件。 所有生成的文件都将显示在 "待生成文件 "选项卡中,您可以点击每个文件查看它们的说明。 有关生成文件的更多信息,请参阅文档中的 "[配置(https://moveit.picknik.ai/main/doc/examples/examples.html)]"部分。
编译运行
cd ~/ws_moveit2
colcon build --packages-select panda_moveit_config
source install/setup.bash
ros2 launch panda_moveit_config demo.launch.py
更多阅读
使用 RViz 开始 MoveIt 运动规划 了解如何在 RViz 中使用生成的配置文件来规划和可视化 MoveIt 运动。 请查看Rviz中的MoveIt快速入门教程,以获取分步指南。
编写您的第一个C++ MoveIt应用程序 通过本教程,编写您的第一个使用MoveIt的C++应用程序,熟悉
MoveGroupInterface,并使用它来规划、执行和可视化本示例中的机器人运动规划。URDF与SRDF: 了解区别 请参阅URDF和SRDF页面,了解本教程中提到的URDF和SRDF组件的更多详情。
探索可用的逆运动学求解器 除了默认的KDL求解器之外,还有其他可用的IK求解器。 更多信息,请参阅
IKFast和pick_ik。
问题
问题1:urdf 文件的 robot name 不要有反斜杠
<!-- <robot name="manipulator_bringup/urdf/6dof"> --> // 错误形式,生成的配置文件会因为反斜杠无法运行
<robot name="orca">
<link name="world"/>
</robot>
问题2
[rviz2-3] [ERROR] [1740131601.699043749] [rviz2]: PluginlibFactory: The plugin for class 'moveit_rviz_plugin/MotionPlanning' failed to load. Error: Failed to load library /opt/ros/humble/lib/libmoveit_motion_planning_rviz_plugin.so. Make sure that you are calling the PLUGINLIB_EXPORT_CLASS macro in the library code, and that names are consistent between this macro and your XML. Error string: Could not load library dlopen error: libgeometric_shapes.so.2.3.2: cannot open shared object file: No such file or directory, at ./src/shared_library.c:99
sudo apt-get install ros-humble-geometric-shapes
问题3
[move_group-2] [INFO] [1740367651.336574261] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Received goal request
[move_group-2] [INFO] [1740367651.336648863] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Execution request received
[move_group-2] [INFO] [1740367651.336665992] [moveit.plugins.moveit_simple_controller_manager]: Returned 0 controllers in list
[move_group-2] [INFO] [1740367651.336671698] [moveit.plugins.moveit_simple_controller_manager]: Returned 0 controllers in list
[move_group-2] [INFO] [1740367651.336679820] [moveit.plugins.moveit_simple_controller_manager]: Returned 0 controllers in list
[move_group-2] [INFO] [1740367651.336683029] [moveit.plugins.moveit_simple_controller_manager]: Returned 0 controllers in list
[move_group-2] [ERROR] [1740367651.336686973] [moveit_ros.trajectory_execution_manager]: Unable to identify any set of controllers that can actuate the specified joints: [ rjoint1 rjoint2 rjoint3 rjoint4 rjoint5 rjoint6 rjoint7 ]
[move_group-2] [ERROR] [1740367651.336690596] [moveit_ros.trajectory_execution_manager]: Known controllers and their joints:
# MoveIt uses this configuration for controller management
moveit_controller_manager: moveit_simple_controller_manager/MoveItSimpleControllerManager
moveit_simple_controller_manager:
controller_names:
- orca_right_arm_controller
orca_right_arm_controller:
type: FollowJointTrajectory
joints:
- rjoint1
- rjoint2
- rjoint3
- rjoint4
- rjoint5
- rjoint6
- rjoint7
# 添加下面两行
action_ns: follow_joint_trajectory
default: true
问题4
Plan规划后动画一直播放- 解决:
rviz2中取消勾选MotionPlanning->Planed Path->Loop Animation