datetime:2025/12/27 12:51
author:nzb
该项目来源于mujoco_learning
light 灯光节点

name=""(用来索引)
mode=[fixed/track/trackcom/targetbody/targetbodycom]
fixed在某处固定光
tarck追踪物体的 trackcom几乎差不多
targetbody跟着body一起动的
target=""
跟踪的目标
directional=[false/true]
true是定向的光,就像场一样,定向平行光;false就是聚光灯,和车灯一样
castshadow="[true/false]"
照射物体有没有影子
active="bool"
是否能控制开关灯
pos="0 0 0"
dir="0 0 0"
方向
attenuation="1 0 0"
衰减系数,[a,b,c],I(d)=I_0/a+bd+cd^2。可以看到a,b,c越大,衰减越明显。
cutoff="0"
聚光灯截止(最大)角度,角度制
exponent="0"
聚光灯汇聚光程度,数值越大光线角度越小
ambient="0 0 0"
颜色,亮度也算是这个
diffuse="0.7 0.7 0.7"
漫射颜色
specular="0.3 0.3 0.3"**
反射颜色
定向光演示:
<light directional="true" ambient="111 "pos=" 005 "dir=" 00 - 1 " diffuse=" 111 "specular=" 111 "/>
车灯演示:
<light pos="0.1 0.02" dir="10 0 -1" ambient="1 1 1" cutoff="60" exponent="0" mode="targetbody" diffuse="1 1 1" specular=" 1 1 1"/>
跟踪物体打光:
<light name="light2arm" castshadow="true" mode="targetbody" target="armor0" diffuse="1 0 0" specular="1 0 0" ambient="1 0 0" cutoff="1" exponent="0" pos="2 2 1"/>
replicate 复制节点(阵列排布)
mujoco中的阵列排布可以是圆周阵列和直线阵列,就像我们在常见的建模软件中的阵列一样,首先需要一个实体,可以是 body或者是 geom,然后我们要确定圆形,半径,排列数量,相距角度等。
count="0"
阵列数量
euler="0 0 0"
围绕三个轴阵列,参数为两个实体相隔角度,角度单位为 compiler中定义的
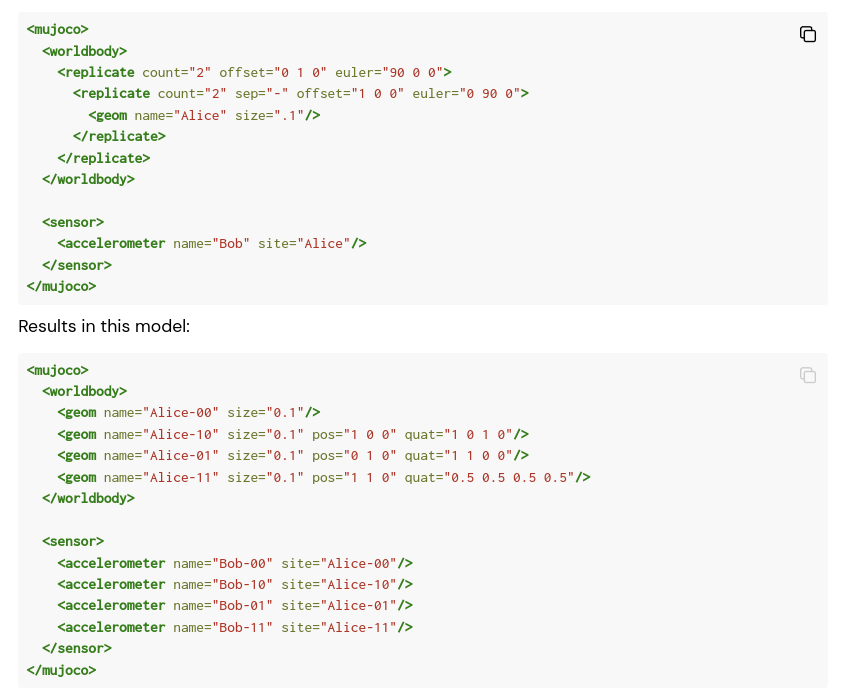
sep=""
名字分隔,阵列的实体名字会是原来的 name+编号,如果sep有字符,则是 name+sep+编号
offset="0 0 0"
阵列的坐标偏移,前两个是 xy偏移,第三个是阵列的元素在 z方向上的距离间隔,也就是螺旋上升
圆周演示:
<body name="laser" pos="0.25 0.25 0.5">
<geom type="cylinder" size="0.01 0.01"/>
<replicate count="50" euler="0 0 0.1254">
<site name="rf" pos="0.1 0 0" zaxis="1 0 0" size="0.001 0.001 0.001" rgba="0.8 0.2 0.2 1"/>
</replicate>
</body>
这个演示中我们在 body里面圆周阵列了 50 个site,绕 z轴,每个site相隔角度为 0. 1254 pi,阵列半径为site中pos的第一个参数,此时pos不再决定几何体的三维空间位置,而是配合阵列使用。
效果: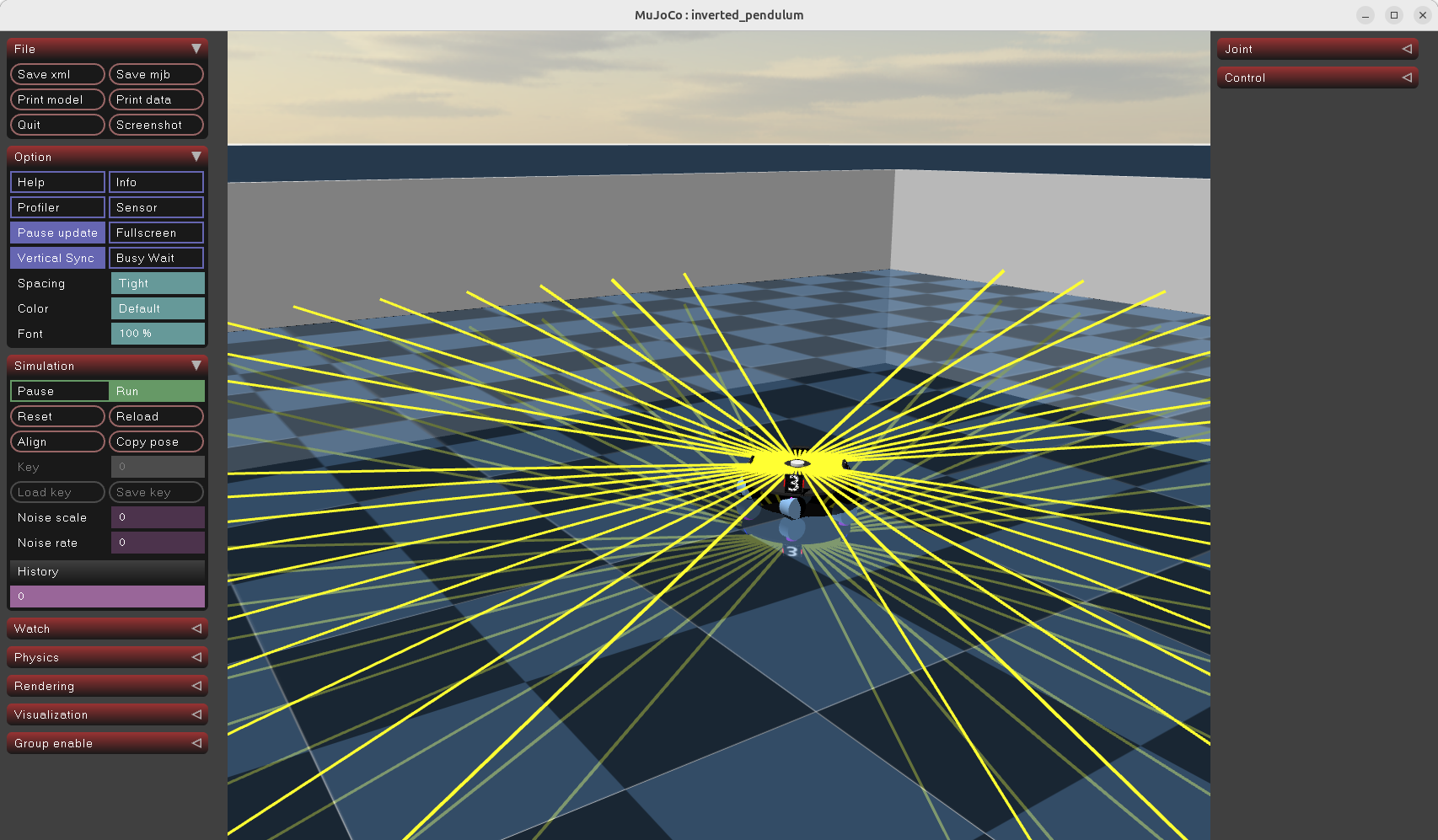
官方文档演示:
直线阵列演示(不加入 euler就是直线阵列,offset作为排布方向和间距):
<replicate count="4" offset="0 .5 0">
<geom type="box" size=".1 .1 .1"/>
</replicate>
<?xml version="1.0" encoding="utf-8"?>
<mujoco model="inverted_pendulum">
<compiler angle="radian" meshdir="meshes" autolimits="true" />
<option timestep="0.002" gravity="0 0 -9.81" wind="0 0 0" integrator="implicitfast"
density="1.225"
viscosity="1.8e-5" />
<visual>
<global realtime="1" />
<quality shadowsize="16384" numslices="28" offsamples="4" />
<headlight diffuse="1 1 1" specular="0.5 0.5 0.5" active="1" />
<rgba fog="1 0 0 1" haze="1 1 1 1" />
</visual>
<asset>
<texture type="skybox" file="../asset/desert.png"
gridsize="3 4" gridlayout=".U..LFRB.D.." />
<texture name="plane" type="2d" builtin="checker" rgb1=".1 .1 .1" rgb2=".9 .9 .9"
width="512" height="512" mark="cross" markrgb=".8 .8 .8" />
<material name="plane" reflectance="0.3" texture="plane" texrepeat="1 1" texuniform="true" />
<material name="box" rgba="0 0.5 0 1" emission="0" />
</asset>
<default>
<geom solref=".5e-4" solimp="0.9 0.99 1e-4" fluidcoef="0.5 0.25 0.5 2.0 1.0" />
<default class="card">
<geom type="mesh" mesh="card" mass="1.84e-4" fluidshape="ellipsoid" contype="0"
conaffinity="0" />
</default>
<default class="collision">
<geom type="box" mass="0" size="0.047 0.032 .00035" group="3" friction=".1" />
</default>
</default>
<worldbody>
<geom name="floor" pos="0 0 0" size="0 0 .1" type="plane" material="plane"
condim="3" />
<!-- 世界头灯 -->
<!-- <light directional="true" ambient=".3 .3 .3" pos="30 30 30" dir="0 -2 -1"
diffuse=".5 .5 .5" specular=".5 .5 .5" /> -->
<!-- 舞台灯光 -->
<light mode="targetbodycom" target="A" directional="false" ambient=".3 .3 .3" pos="0 0
10"
dir="0 -2 -1" cutoff="15" exponent="0"
diffuse=".5 .5 .5" specular=".5 .5 .5" />
<body name="A" pos="0 0 0.2">
<freejoint />
<geom type="box" size=".1 .1 .1" />
</body>
<body name="B" pos="0 0 0.5">
<freejoint />
<geom type="box" size=".1 .1 .1" rgba=".8 .1 .1 1" />
<!-- 自身带一个灯光对场景打光 -->
<light mode="trackcom" directional="false" ambient=".3 .3 .3" diffuse=".5 .5 .5" specular=".5 .5 .5" />
</body>
<body name="laser" pos="0 0 0.5">
<geom type="sphere" size="0.01" rgba="0.2 0.2 0.2 1" />
<replicate count="25" euler="0 0.251327412 0" sep="BBB">
<!-- <replicate count="25" euler="0 0 0.251327412" sep="AAA" offset="0.01 0.01 0.01"> -->
<replicate count="25" euler="0 0 0.251327412" sep="AAA">
<site name="rf" pos="0.02 0 0" zaxis="1 0 0" size="0.001 0.001 0.001"
rgba="0.2 0.2 0.2 1" />
</replicate>
</replicate>
</body>
<!-- 直线阵列 -->
<replicate count="10" offset="0 .5 .5">
<geom type="box" size=".1 .1 .1" />
</replicate>
<!-- 用于可视化传感器 -->
<!-- <geom type="box" size="5 0.1 5" pos="0 5 0" rgba="0.2 0.2 0.2 0.2"/>
<geom type="box" size="5 0.1 5" pos="0 -5 0" rgba="0.2 0.2 0.2 0.2"/>
<geom type="box" size="0.1 5 5" pos="5 0 0" rgba="0.2 0.2 0.2 0.2"/>
<geom type="box" size="0.1 5 5" pos="-5 0 0" rgba="0.2 0.2 0.2 0.2"/>
<geom type="box" size="5 5 0.1" pos="0 0 5" rgba="0.2 0.2 0.2 0.2"/> -->
</worldbody>
<sensor>
<!-- 传感器 -->
<!-- <rangefinder site="rf" /> -->
</sensor>
</mujoco>