datetime:2023/05/11 15:12
author:nzb
BT5:DecoratorNodes源码解析
DecoratorNode基类
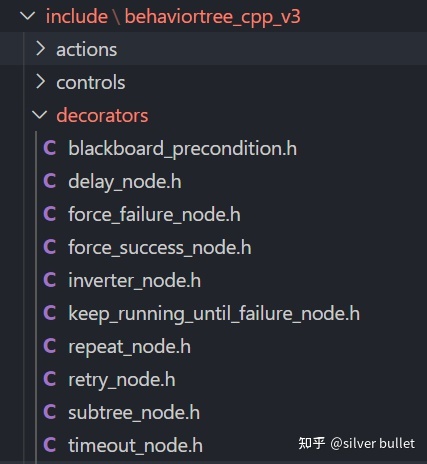
BehaviorTree.CPP中内建的装饰节点如下,都继承自 BehaviorTree.CPP\include\behaviortree_cpp_v3\decorator_node.h 中的DecoratorNode类。
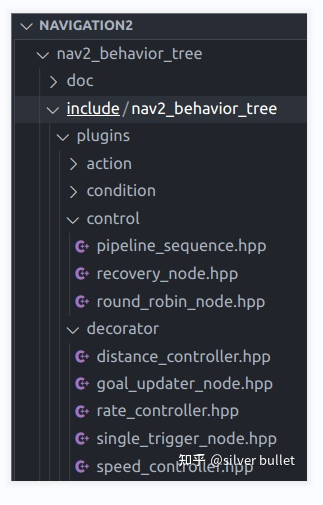
很明显,该类只有1个子节点。ROS中也定义了一些方便使用的ControlNodes和DecoratorNodes,可以导入使用。
class DecoratorNode : public TreeNode {
protected:
TreeNode* child_node_;
... ...
}
executeTick()- 如果子节点状态为
SUCCESS或FAILURE,调用子节点的resetStatus(),子节点状态变为IDEL
- 如果子节点状态为
BlackboardPreconditionNode
细分为3个节点:BlackboardCheckInt、BlackboardCheckDouble、BlackboardCheckString。顾名思义,该节点是检查blackboard的某个port的值是否符合预期的。
包含3个InputPort,当value_A和value_B的值相等时,执行子节点。否则,不执行子节点,并返回return_on_mismatch设定的值。
static PortsList providedPorts() {
return {InputPort("value_A"),
InputPort("value_B"),
InputPort<NodeStatus>("return_on_mismatch") };
}
源代码中使用==来判断2个变量的值,对于double类型不妥。
template <typename T>
inline NodeStatus BlackboardPreconditionNode<T>::tick() {
T value_A;
T value_B;
NodeStatus default_return_status = NodeStatus::FAILURE;
setStatus(NodeStatus::RUNNING);
if (getInput("value_A", value_A) && getInput("value_B", value_B) &&
value_B == value_A) {
return child_node_->executeTick();
}
if (child()->status() == NodeStatus::RUNNING) {
haltChild();
}
getInput("return_on_mismatch", default_return_status);
return default_return_status;
}
示例:
<BlackboardCheckInt value_A="{the_answer}"
value_B="42"
return_on_mismatch="FAILURE"/>
DelayNode
延时delay_msec毫秒后,执行子节点,并返回子节点的执行结果。延时期间,返回RUNNING。
static PortsList providedPorts() {
return {InputPort<unsigned>("delay_msec", "Tick the child after a few milliseconds")};
}
示例:
<Delay delay_msec="5000">
<KeepYourBreath/>
</Delay>
ForceFailureNode
如果子节点执行后返回RUNNING,该节点返回RUNNING;否则,该节点返回FAILURE,即强制返回失败状态。
ForceSuccessNode与ForceFailureNode大同小异。
InverterNode
如果子节点执行后返回RUNNING,该节点返回RUNNING;
如果子节点执行后返回SUCCESS,该节点返回FAILURE;
如果子节点执行后返回FAILURE,该节点返回SUCCESS;
即对子节点的执行结果取反。
KeepRunningUntilFailureNode
如果子节点执行后返回RUNNING或SUCCESS,下次tick()继续执行子节点,直到子节点返回FAILURE。
RepeatNode
重复执行子节点NUM_CYCLES 次,若每次都返回 SUCCESS,该节点返回SUCCESS;
若子节点某次返回FAILURE,该节点不再重复执行子节点,立即返回FAILURE;
若子节点返回RUNNING,该节点也返回RUNNING。
static PortsList providedPorts() {
return { InputPort<int>(NUM_CYCLES,
"Repeat a succesful child up to N times. "
"Use -1 to create an infinite loop.") };
}
示例:
<Repeat num_cycles="3">
<ClapYourHandsOnce/>
</Repeat>
RetryNode(RetryUntilSuccessful)
如果子节点执行后返回
RUNNING,该节点返回RUNNING;如果子节点执行后返回
SUCCESS,重置子节点resetChild(),该节点返回SUCCESS,不再执行;如果子节点执行后返回
FAILURE- 重置子节点
resetChild(),子节点变回IDLE - 再次尝试执行子节点,直到尝试了
num_attempts次或-1直到成功;
- 重置子节点
static PortsList providedPorts() {
return { InputPort<int>(NUM_ATTEMPTS,
"Execute again a failing child up to N times. "
"Use -1 to create an infinite loop.") };
}
示例:
<RetryUntilSuccesful num_attempts="3">
<OpenDoor/>
</RetryUntilSuccesful>
SubtreeNode
用来封装一个subtree,这样会有一个独立的blackboard,__shared_blackboard port的默认值是false,因此开发者要自行重映射端口。 但tick()
函数中并没有使用__shared_blackboard port,而是在 BehaviorTree.CPP\src\xml_parsing.cpp中使用的,这点要注意,SubtreePlusNode
的__autoremap port也是如此。
static PortsList providedPorts() {
return { InputPort<bool>("__shared_blackboard", false,
"If false (default) the subtree has its own blackboard and you"
"need to do port remapping to connect it to the parent") };
}
SubtreePlusNode
控制重映射的强化版SubtreeNode。当__autoremap port为true时,会自动重映射名称相同的port。结合代码示例会更容易理解。
static PortsList providedPorts() {
return { InputPort<bool>("__autoremap", false,
"If true, all the ports with the same name will be remapped") };
}
示例:
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<Sequence>
<!--第一种-->
<SetBlackboard value="Hello" output_key="myParam"/>
<SubTreePlus ID="Talk" param="{myParam}"/>
<!--第二种-->
<SubTreePlus ID="Talk" param="World"/>
<!--第三种-->
<SetBlackboard value="Auto remapped" output_key="param"/>
<SubTreePlus ID="Talk" __autoremap="1"/>
</Sequence>
</BehaviorTree>
<BehaviorTree ID="Talk">
<SaySomething message="{param}"/>
</BehaviorTree>
</root>
上面有3种重映射的实现方式。第1、2种是最常见的。
第1种将
Subtree的blackboard的param entry映射到Parent tree的blackboard的myParam entry,将其值设置为字符串"Hello"。第2种将
Subtree的blackboard的param entry的值直接设置为字符串"World"。第3种在
Parent tree的blackboard中增加了param entry,没有指定映射到subtree的哪个port。但由于设定__autoremap=true, 该entry会自动映射到subtree的blackboard的param entry。SaySomething节点会在其message port中获取到值为字符串“Auto remapped”。
TimeoutNode
在设置的msec 毫秒内,返回子节点执行的状态。若子节点返回FAILURE或SUCCESS,不再执行。如果超时,终止子节点执行,并返回FAILURE。 类中使用了TimerQueue
作为计时器,可以定时多个任务,比较有趣。
static PortsList providedPorts() {
return { InputPort<unsigned>("msec", "After a certain amount of time, "
"halt() the child if it is still running.") };
}
示例:
<Timeout msec="5000">
<KeepYourBreath/>
</Timeout>
RateController
- 频率控制
- 参数:
hz tick子节点条件- 第一次节点处于
IDLE状态 - 子节点是
RUNNING状态 - 达到频率设置周期
- 第一次节点处于
- 返回
- 如果子节点执行后返回
RUNNING,该节点返回RUNNING; - 如果子节点执行后返回
SUCCESS,该节点返回SUCCESS,重置开始时间; - 如果子节点执行后返回
FAILURE,该节点返回FAILURE;
- 如果子节点执行后返回