datetime:2023/09/13 09:36
author:nzb
该项目来源于大佬的动手学ROS2
1. OOP介绍
除了使用上节中的只定义一个main函数就完成编写一个Python节点外,还有另外两种方式。
本节就来讲一讲出现么多种编写节点的原因,并对其中较为重要的OOP方法进行介绍。
要做机器人离不开计算机编程,而计算机编程经过多年的发展,演变出了三种不同且常用的编程思想,分别是:
- 面向过程编程思想。缩写:POP
- 面向对象编程思想。缩写:OOP
- 函数式思想。缩写:FP
1.Why
为什么了解这些编程思想呢?尤其是OOP。
遇到过很多同学,在阅读机器人相关开源程序代码时,比如导航框架Nav2、机械臂运动控制框架Moveit时发现,别人的代码,每一行好像都看得懂,但放一起就看不懂了,看别人函数调来调去,很快人就给整蒙了。不知道如何下手。
这其实就是对别人的编程思想不了解造成的,所以本节课就给提一提常见的三种编程思想,让大家脑子里有个概念,以后遇到了看不明白的程序,知道该往哪个方向去学习。
编程思想博大精深,这里只是对三种思想的基本介绍。
2.思想辨析
首先明确一件事情,编程是为了什么?
是为了赚钱吗?
不,我们写程序肯定是为了解决实际的问题的,那编程思想编程思想就是解决问题的思路(赚钱工具)
那这三种思想有什么区别呢?
2.1 用三种思想把大象装进冰箱
比如我们想把一只大象装进冰箱,分别用三种思想,我们看看有什么不一样。
2.1.1 面向过程思想
如果我们采用面向过程的思想,可以分为三步:
- 打开冰箱门
- 把大象塞进去
- 关上冰箱门
面向过程编程就是分析出解决问题所需要步骤,然后分别实现每一步,再一步步执行即可。
2.1.2 面向对象思想
面向对象编程思想(OOP)怎么做呢?
那就要先知道面向对象是什么?搞清楚啥是对象?

对象是女朋友吗?答案肯定不是。
任何我们想要探究的事物都可以当作一个对象,比如我们可以把你家的冰箱理解为一个对象,我们就可以研究你家冰箱由哪些部分(指令装置等)组成,你家冰箱能干什么(制冷、调温等)?
接着我们开始下定义,就是取个高大上的名字
| 冰箱 | 定义 | 举例 |
|---|---|---|
| 冰箱的组成部分 | 冰箱的属性 | 制冷器,调温旋钮、灯带等 |
| 冰箱能干什么 | 冰箱的行为 | 制冷,调温、照明等 |
对象的行为其实是对其属性的操作,比如对制冷器操作就可以制冷,给灯带通电就可以照明。
对象 = 属性+行为
接着我们开始采用OOP的方法把大象装进冰箱
- 调用:冰箱->打开门(行为)
- 调用:冰箱->装东西(行为)
- 调用:冰箱->关闭门(行为)
看起来和面向过程没啥区别,但我们的思想发生了重大的转变,我们把冰箱当作了一个独立的对象,我们是通过和冰箱这个对象交互完成了整个过程。
接着来看函数式编程
- 定义关进(冰箱,大象)函数
- 实现函数:关门(放入(开门(冰箱),大象))
可以看到多层的函数嵌套调用,这就是函数编程的魅力,因为FP不是我们的机器人学习中的重点,这里就不过多讲解啦!
3.面向对象编程
简单介绍完,我们来说说今天的主角,面向对象编程OOP。
面向对象中有五个重要的概念,理解这五个概念相当于对OOP编程有了了解,下面一个个来介绍。
3.1 类与对象(抽象与具体)
我们通过调用你家美的冰箱的开门、装东西和关门三个行为来把大象装进冰箱。这时我们可以把你家的美的冰箱(具体的)称之为一个对象,而冰箱(抽象的)就称为一个类。
比如说鱼类和,鱼类就是一个类,而就是鱼类(抽象的)中的一个对象(具体的)。
在ROS2设计时这种抽象和具体的思想发挥着非常重要的作用,比如说DDS是有很多厂家的,ROS2为了匹配不同厂家的DDS,就设计除了DDS抽象层,而每一个具体的DDS厂家,我们可以称之为一个DDS的对象,是具体的。
3.2 封装、继承与多态
所谓封装就是将属性和行为封装在一起。上面已经介绍了对象 = 属性+行为,比如冰箱将冰箱的温度值(属性)和对温度值的操作(行为)等封装在一起。
继承,继承可以帮我们减少很多的工作量(比如王撕聪从他爹那里继承了很多钱,这样他就少奋斗了很多年),比如ROS2中的执行器类,通过继承执行器类实现了单线程执行器和多线程执行器,更多具体的例子我们在后续的学习中遇到再说。
多态,其实很简单,我们可以说鲤鱼是鱼类,草鱼是鱼类,鲤鱼是鱼类。同一个鱼类可以有多种不同的类型,即多态。更多的用法,等到写代码的时候再和一起解锁
4.如何选择code思想
三种编程思想,我们写程序的时候该如何选择呢?
个人的拙见是根据你的功能需求来,如果只需要实现一个很简单的功能,比如只是做一个键盘控制器,实现控制小车前进后退,直接采用面向过程的设计思想即可。
但如果是做一个稍大的工程,且后续要考虑功能的拓展性,这个时候就需要采用面向对象的思路来了。
参考链接:
-浅谈面向对象的编程思想:如何优雅地把大象装进冰箱?_SYSU_101的博客-CSDN博客
2.使用面向对象方式编写ROS2节点
1.C++版本
在d2lros2/chapt2/chapt2_ws/src/example_cpp/src下新建node_03.cpp,接着输入下面的代码。
#include "rclcpp/rclcpp.hpp"
/*
创建一个类节点,名字叫做Node03,继承自Node.
*/
class Node03 : public rclcpp::Node
{
public:
// 构造函数,有一个参数为节点名称
Node03(std::string name) : Node(name)
{
// 打印一句
RCLCPP_INFO(this->get_logger(), "大家好,我是%s.",name.c_str());
}
private:
};
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
/*产生一个node_03的节点*/
auto node = std::make_shared<Node03>("node_03");
/* 运行节点,并检测退出信号*/
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
接着修改CMakeLists.txt,添加下方代码。
add_executable(node_03 src/node_03.cpp)
ament_target_dependencies(node_03 rclcpp)
install(TARGETS
node_03
DESTINATION lib/${PROJECT_NAME}
)
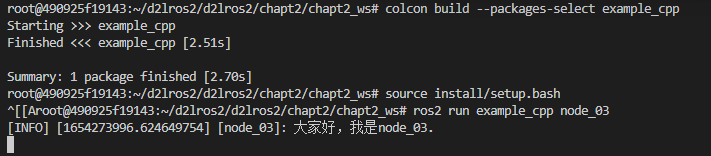
接着即可自行编译测试
colcon build --packages-select example_cpp
source install/setup.bash
ros2 run example_cpp node_03
2.Python版本
在d2lros2/d2lros2/chapt2/chapt2_ws/src/example_py/example_py下新建node_04.py,输入下面的代码
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
class Node04(Node):
"""
创建一个Node04节点,并在初始化时输出一个话
"""
def __init__(self, name):
super().__init__(name)
self.get_logger().info("大家好,我是%s!" % name)
def main(args=None):
rclpy.init(args=args) # 初始化rclpy
node = Node04("node_04") # 新建一个节点
rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)
rclpy.shutdown() # 关闭rclpy
接着修改setup.py
entry_points = {
'console_scripts': [
"node_02 = example_py.node_02:main",
"node_04 = example_py.node_04:main"
],
},
注意格式和结尾的
,符号,console_scripts是个数组。
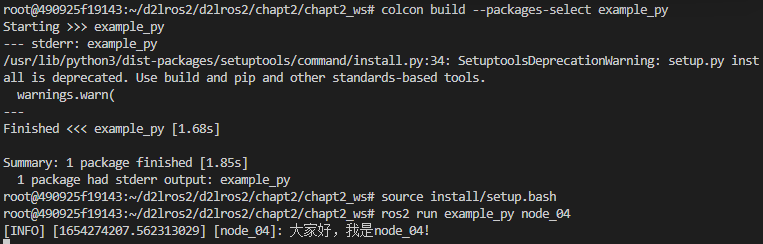
编译测试
colcon build --packages-select example_py
source install/setup.bash
ros2 run example_py node_04
3.总结
把节点写成一个类的形式对我们组织代码和使用ROS2的新特性有很多的好处,后面我们将以此种方式(用类建立节点)来学习后续内容。