datetime:2023/10/24 10:23
author:nzb
该项目来源于大佬的动手学ROS2
2.你的第一个MicroROS节点
上一节我们介绍了MicroROS和Agent的安装,本节我们开始正是编写代码,接入ROS2。
一、新建工程添加依赖
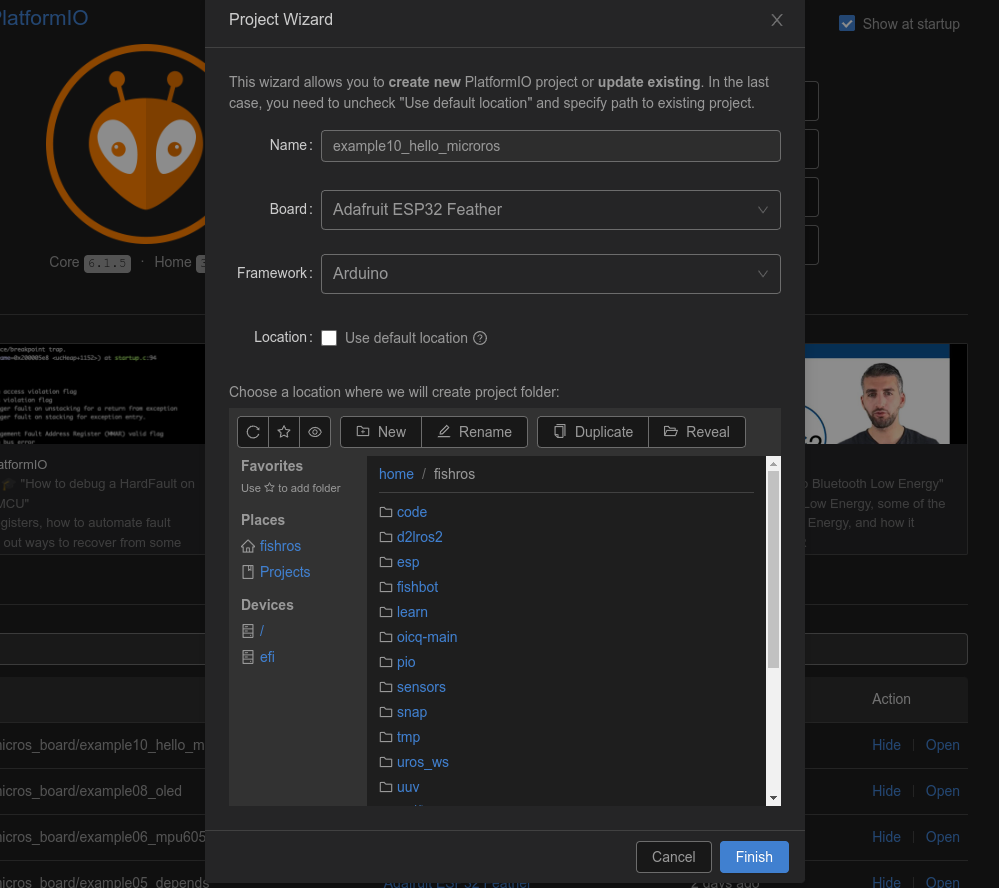
1.1 新建工程
新建example10_hello_microros工程,这里需要更改下工程的位置,默认目录是在文档目录下,在测试时发现目录定位上有bug,所以建议建议直接放到主目录或其下目录,这里直接放到主目录。
1.2 添加依赖
打开platform.ini,接着我们添加MicroROS的依赖。
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
lib_deps =
https://gitee.com/ohhuo/micro_ros_platformio.git
这里使用的地址并不是MicroROS官方仓库,而是经过修改后的国内仓库地址,里面放置了编译好后可以直接使用的microros静态库,并对仓库中需要梯子的地址进行了替换。
二、编写代码-第一个节点
开始编写代码,因为Micro-ROS遵循RCLC-API,所以这里通过一个最简单的例程介绍如何新建一个节点。
#include <Arduino.h>
#include <micro_ros_platformio.h>
#include <rcl/rcl.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
void setup()
{
Serial.begin(115200);
// 设置通过串口进行MicroROS通信
set_microros_serial_transports(Serial);
// 延时时一段时间,等待设置完成
delay(2000);
// 初始化内存分配器
allocator = rcl_get_default_allocator();
// 创建初始化选项
rclc_support_init(&support, 0, NULL, &allocator);
// 创建节点 hello_microros
rclc_node_init_default(&node, "hello_microros", "", &support);
// 创建执行器
rclc_executor_init(&executor, &support.context, 1, &allocator);
}
void loop()
{
delay(100);
// 循环处理数据
rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100));
}
上面代码并不复杂,已经将注释写上,强烈建议你跟着代码敲一遍,不要直接复制粘贴。
相比在上位机中开发ROS,这里多了几步
- 设置通信协议,因为可以通过多种方式连接,所以需要进行提前设置
- 初始化内存分配器,在微控制器上资源受限,内存的管理要很细致
- 创建初始化选项,用于初始化rcl并创建一些需要用到的数据结构体
关于rclc的api并没有找到文档,不过源码的头文件依然非常清晰,直接安装Ctrl点击某个函数即可跳转(不行的,重启下Vscode)。
比如关于rclc_support_init 的源码及参数介绍。
/**
* Initializes rcl and creates some support data structures.
* Initializes clock as RCL_STEADY_TIME.
* * <hr>
* Attribute | Adherence
* ------------------ | -------------
* Allocates Memory | Yes (in RCL)
* Thread-Safe | No
* Uses Atomics | No
* Lock-Free | Yes
*
* \param[inout] support a zero-initialized rclc_support_t
* \param[in] argc number of args of main
* \param[in] argv array of arguments of main
* \param[in] allocator allocator for allocating memory
* \return `RCL_RET_OK` if RCL was initialized successfully
* \return `RCL_RET_INVALID_ARGUMENT` if any null pointer as argument
* \return `RCL_RET_ERROR` in case of failure
*/
RCLC_PUBLIC
rcl_ret_t
rclc_support_init(
rclc_support_t * support,
int argc,
char const * const * argv,
rcl_allocator_t * allocator);
三、运行测试
连接开发板,编译下载,如果遇到端口被占用,多半是你的microros_agent没有关闭,Ctrl+C打断运行再次尝试。
接着打开Agent
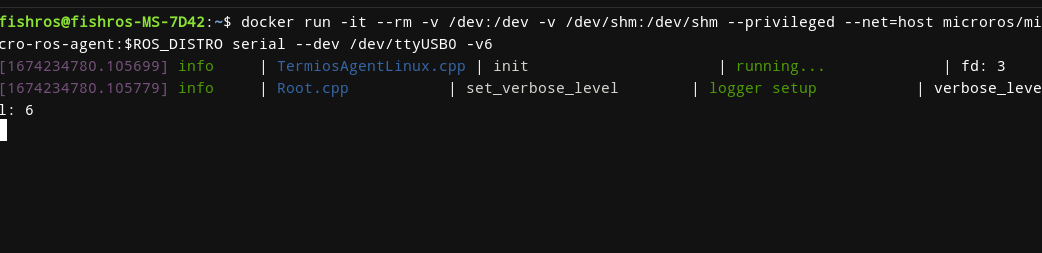
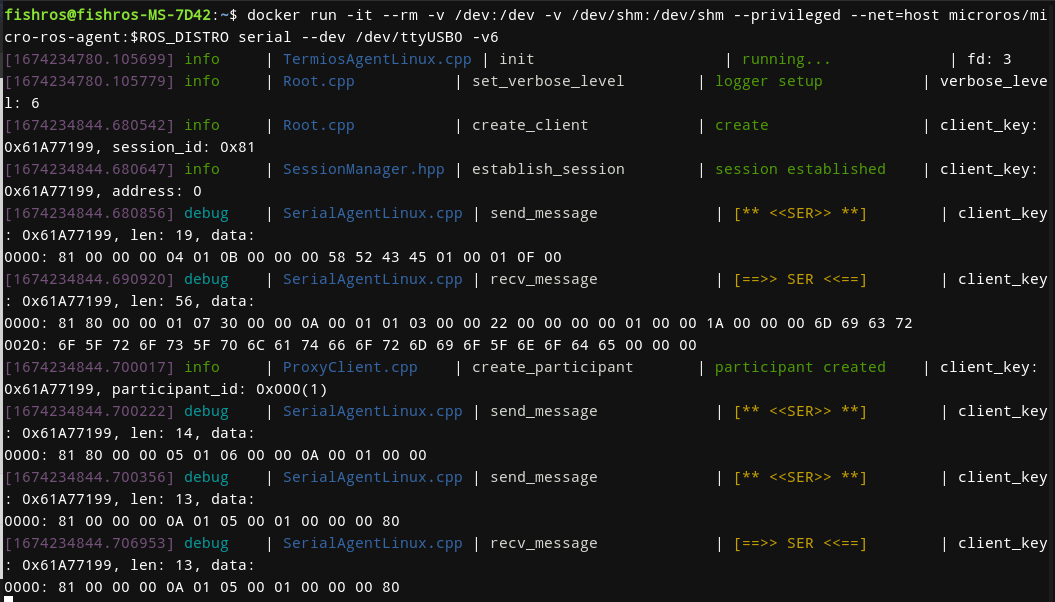
然而并没有什么反应,重新点击一次RST即可看到有数据发送和接收过来了。
接着打开新的终端,输入指令
ros2 node list
ros2 node info /hello_microros
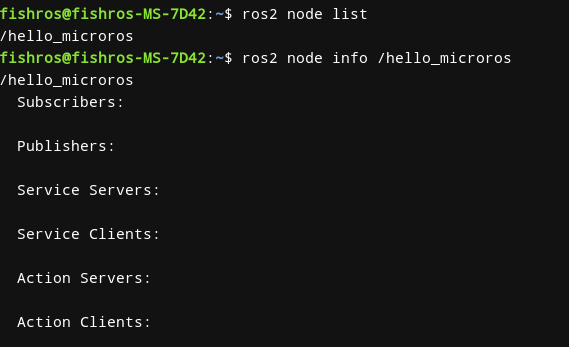
可以看到,我们的第一个节点成功运行起来了。
四、总结
本节我们成功的在微控制器平台上将MicroROS节点运行起来了,下一节我们开始正式进行ROS2通信的学习。