datetime:2023/09/11 14:16
author:nzb
该项目来源于大佬小鱼的动手学ROS2
3.动手安装ROS2
到了这一节,终于可以开始安装ROS2了。安装ROS2本来是一件比较麻烦的事情,原因在于ROS2对于Ubuntu系统来说属于第三方软件,我们之前有讲到,第三方软件需要先添加源、再添加秘钥才才使用apt进行安装。
注意:1和2两种安装方式选择一个即可,第一次建议使用一键安装ROS2,防止出错。
3.1.一键安装ROS2
首先启动虚拟机或者启动双系统中的ubuntu,打开终端,输入下面的指令。
wget http://fishros.com/install -O fishros && . fishros
输入密码,在选项界面选择1-一键安装ROS,接着根据你的情况选择是否更换系统源(基础篇更换了就不用了),接着等待一会就会让你选择要安装的ROS2版本了。这里选择humble版本的ROS2即可。
接着会问你安装桌面版还是基础版,我们选择桌面版,包含可视化工具,如果是在树莓派上装可以使用基础版。
安装完成后输入ros2如果看到下面的界面则安装成功
3.2. 手动安装ROS2
3.2.1 Ctrl+Alt+T打开终端
3.2.2 添加源
echo "deb [arch=$(dpkg --print-architecture)] https://repo.huaweicloud.com/ros2/ubuntu/ $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
3.2.3 添加源对应的秘钥
sudo apt install curl gnupg2 -y
curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add -
3.2.4 更新
sudo apt update
3.2.5 安装ROS2
上面步骤完成后,安装就变得非常的简单了,一行指令搞定;
sudo apt install ros-humble-desktop
然后等着就行:
3.2.6 安装额外依赖
sudo apt install python3-argcomplete -y
3.2.7 配置环境变量
大家此时再打开一个终端,输入ros2,看看会有什么神奇的事情发生吧。
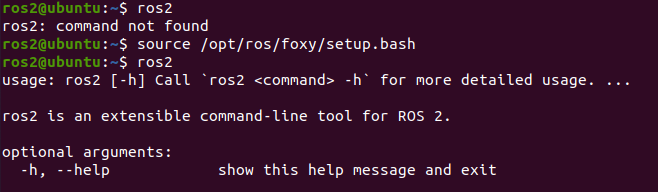
很不幸,你可能会看到到:

输入一句话:
source /opt/ros/humble/setup.bash
再尝试一下,就可以了。
这是为什么呢?
因为虽然安装好了ros2,但ros2并没有加入到系统默认的环境中来。每次想用还需要进行source.有什么办法可以一劳永逸呢?
有的,把ros2加入bashrc中。就是每次启动终端都让它自动的输入这句话。
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
3.3.出现问题可以这样卸载
别的教程肯定不会写这个,不过这招有时候还挺好用,就是麻烦一些哈。
sudo apt remove ros-humble-*
sudo apt autoremove
3.4.ROS2到底装哪里了
在Windows安装过软件的小伙伴都知道安装软件都会选择一个安装目录,但是安装ROS时候并没有让你选择,ROS安装的默认目录在/opt/ros/下,根据版本的名字进行区分。
我们本节安装的是humble版本的ROS,所以安装目录在/opt/ros/humble下。
cd /opt/ros/humble/
ls
参考链接:
- ROS2 镜像使用帮助:https://mirrors.tuna.tsinghua.edu.cn/help/ros2/
- ROS2官方文档:http://docs.ros.org/en/humble/index.html
4.ROS2初体验
通过几个简单的小例子来体验ROS2软件库和工具集。
4.1.游戏1:你说我听
游戏内容:很简单,我们启动两个节点,一个节点负责发消息(说),一个节点负责收消息(听)。
启动一个终端Ctrl+Alt+T
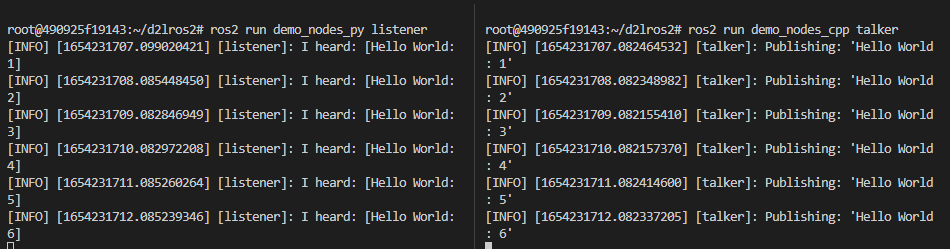
启动倾听者
ros2 run demo_nodes_py listener启动一个新终端Ctrl+Alt+T
启动说话者
ros2 run demo_nodes_cpp talker
观察一下现象,talker节点每数一个输,倾听节点每一次都能听到一个,是不是很神奇。
4.2.游戏2:涂鸦乌龟
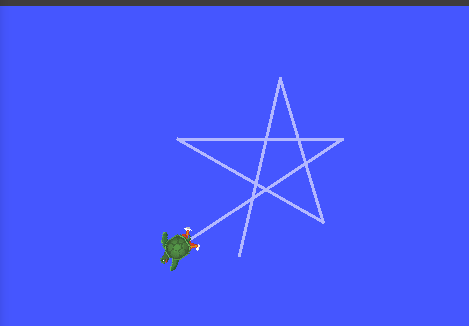
游戏内容:启动海龟模拟器,启动海龟遥控器,控制海龟在地图上画出任意轨迹即可。
本来是控制海龟画个五角星的,但经过手动多次尝试,发现太难了。大家有时间可以试试,有搞定的可以发个图在群里分享一下。
4.2.1 启动海龟模拟器
打开终端Ctrl+Alt+T,输入下面的指令
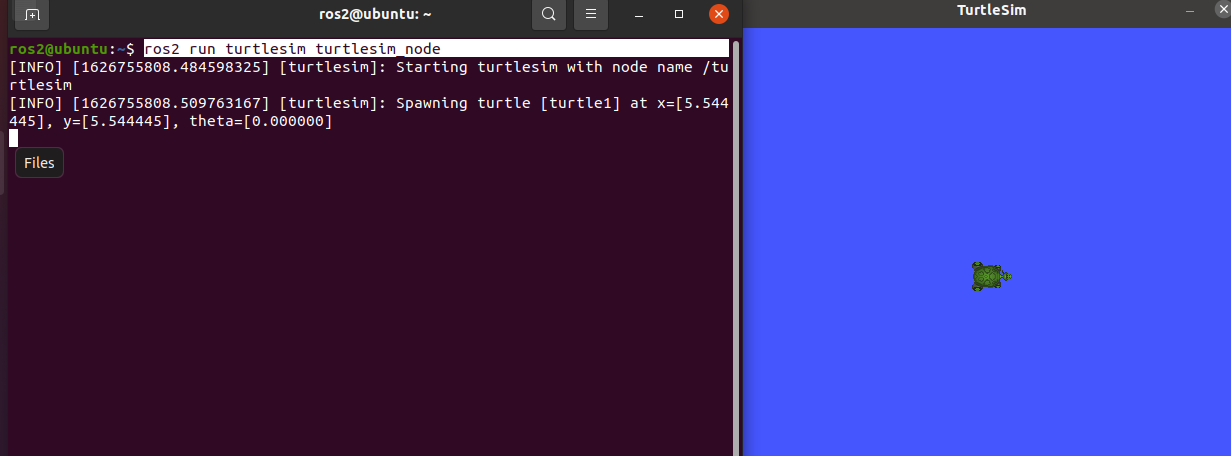
ros2 run turtlesim turtlesim_node
就可以看到这样的界面
4.2.2 启动海龟遥控器
点一下原来的终端输入Ctrl+Shift+T 打开一个新的标签页输入
ros2 run turtlesim turtle_teleop_key
你可以看到这样子的界面

这个时候你就可以使用上下左右去遥控海龟了,快试一试吧。
4.3. RQT可视化
保持前面两个游戏在运行状态,打开终端,输入rqt。
rqt
打开之后的窗口如下图,空空如也,不要担心,因为我们没有选插件的原因。
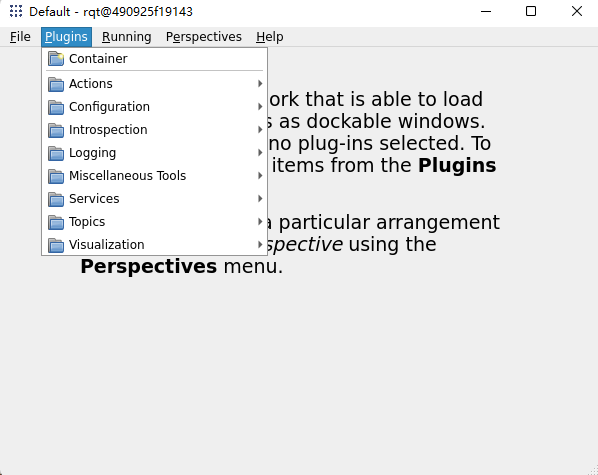
4.3.1 选择插件
这里我们可以选择现有的几个RQT插件来试一试,可以看到和话题、参数、服务、动作四大通信组件相关的工具都有,还有一些可视化、日志和系统计算图等相关的。
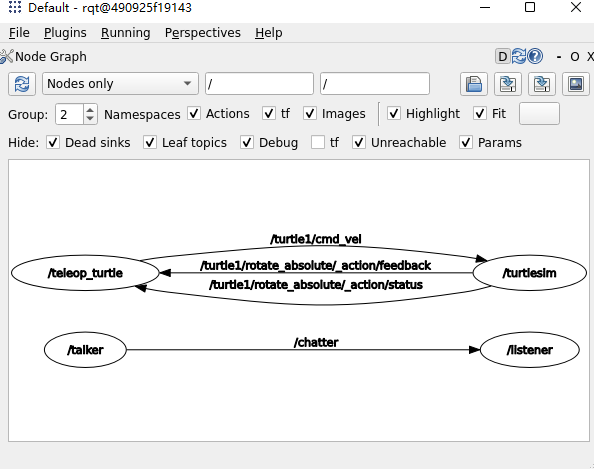
4.3.2 Introspection / Node Graph

打开后就可以看到上面几个节点之间的数据关系了,是不是很方便的工具。
4.4.总结
通过本节的小游戏,你应该对ROS2稍微熟悉了一丢丢,不过心中也会多出那么几个问题?比如:
为什么一个节点说,一个节点会听到?
为什么键盘可以控制小乌龟前进后退?
没关系,让我们继续往下,你会一点点的有了拨云见月的感觉。