datetime:2023/10/24 10:23
author:nzb
该项目来源于大佬的动手学ROS2
1.Micro-ROS介绍与服务安装
本节我们主要介绍下Micro-ROS几大主要特点。
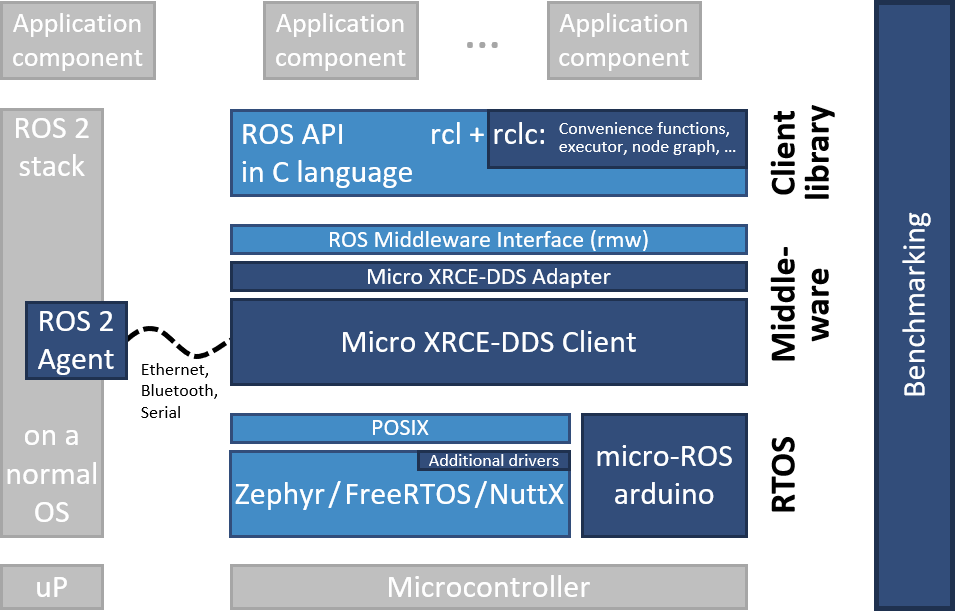
先上系统框架图,下面再一一介绍。
一、特点1:运行在微控制器上的ROS2
首先从名称看,Micro-ROS,Micro指的就是microcontrollers即微控制器。

核心作用就是上面这句话micro-ROS puts ROS 2 onto microcontrollers。既然是在微控制器上,因硬件资源受限,其功能肯定会有所裁剪,但核心的ROS2通信功能依然保有。

二、特点2:MicroROS支持多种通信协议并依赖Agent
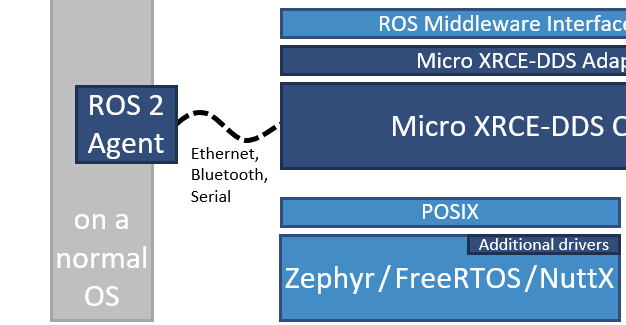
所谓Agen其实就是一个代理,微控制器可以通过串口,蓝牙、以太网、Wifi等多种协议将数据传递给Agent,Agent再将其转换成ROS2的话题等数据,以此完成通信。
三、特点3:通过RCLC-API调用MicroROS
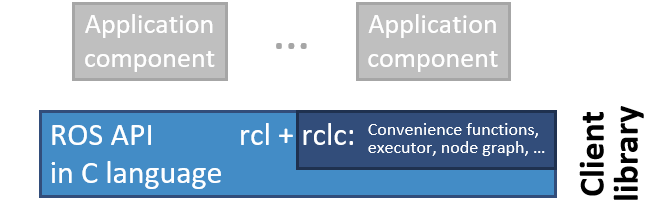
因为MicroROS遵循RCLCAPI,所以和在上位机中使用Python或者C++调用MicroROS有所不同,最终代码风格如下面这段所示
#include <rcl/rcl.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
rcl_timer_t timer;
void setup() {
// Configure serial transport
Serial.begin(115200);
set_microros_serial_transports(Serial);
delay(2000);
allocator = rcl_get_default_allocator();
//create init_options
RCCHECK(rclc_support_init(&support, 0, NULL, &allocator));
// create node
RCCHECK(rclc_node_init_default(&node, "micro_ros_platformio_node", "", &support));
// create publisher
RCCHECK(rclc_publisher_init_default(
&publisher,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32),
"micro_ros_platformio_node_publisher"));
// create executor
RCCHECK(rclc_executor_init(&executor, &support.context, 1, &allocator));
RCCHECK(rclc_executor_add_timer(&executor, &timer));
msg.data = 0;
}
四、在上位机上安装Agent
我们使用Docker来进行Agent的安装。
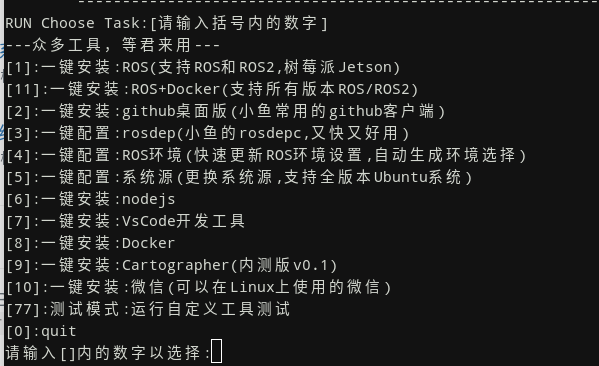
4.1 安装Docker
打开终端,复制粘贴输入下面代码
wget http://fishros.com/install -O fishros && . fishros
接着输入密码,在下面的界面输入8,一键安装Docker,完成后等待即可。
4.2 运行Agent
安装完成Docker后打开终端,输入下面的指令
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO serial --dev /dev/ttyUSB0 -v6
稍微等待下载完成,看到如下界面表示成功启动。
上面的指令是使用串口通讯协议运行microros-agent,还可以通过UDP、TCP、CAN等协议运行,具体指令如下
# UDPv4 micro-ROS Agent
docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
# Serial micro-ROS Agent
docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO serial --dev [YOUR BOARD PORT] -v6
# TCPv4 micro-ROS Agent
docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO tcp4 --port 8888 -v6
# CAN-FD micro-ROS Agent
docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO canfd --dev [YOUR CAN INTERFACE] -v6
五、总结
本节我们主要介绍了MicroROS的主要特点,接着介绍使用Docker下载和运行Agent,既然搞定了上位机,下一节我们正是开始在开发板上编写MicroROS节点,然后测试与上位机的连接是否正常。