datetime:2023/09/19 14:02
author:nzb
该项目来源于大佬的动手学ROS2
1.ROS参数通信原理介绍
ROS2的参数其实是用服务实现的,是怎么知道的呢?
随意运行一个节点,你使用下面的指令,就可以看到多出来很多的参数相关的服务。
ros2 service list
比如启动乌龟模拟器
ros2 run turtlesim turtlesim_node
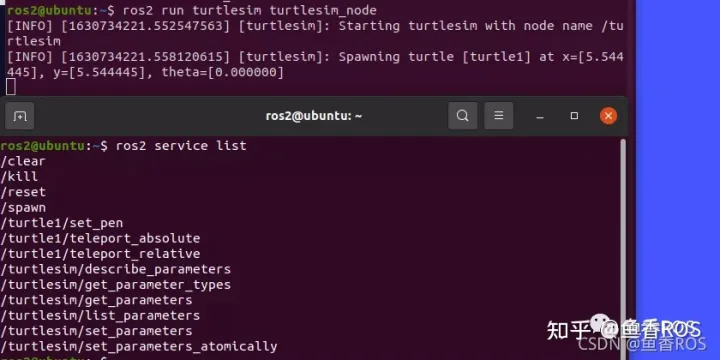
多出来的这些服务就是用于操作这个节点的参数的
/turtlesim/describe_parameters
/turtlesim/get_parameter_types
/turtlesim/get_parameters
/turtlesim/list_parameters
/turtlesim/set_parameters
/turtlesim/set_parameters_atomically
我们如何使用服务查看参数呢?
手动调一下服务就行了~
ros2 service call /turtlesim/list_parameters rcl_interfaces/srv/ListParameters "{prefixes: [],depth: 0}"
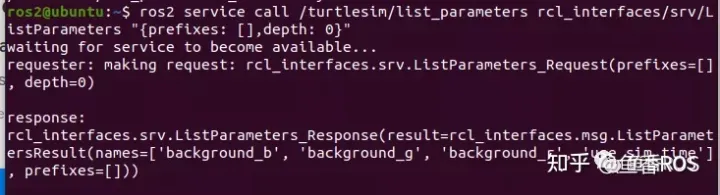
这里可以看到结果里的四个参数
names=['background_b', 'background_g', 'background_r','use_sim_time']
采用ros2 param list再看看对不对
ros2 param list
是不是长的一样
总结
通过上面的实验告诉我们ROS2的参数操作其实就是通过服务通信方式实现的,获取参数列表,set和get操作就是操作相应的服务