datetime:2023/09/26 18:28
author:nzb
该项目来源于大佬的动手学ROS2
1. URDF统一机器人建模语言
本节课我们来介绍机器人的URDF建模。
URDF(Unified Robot Description Format)统一机器人描述格式,URDF使用XML格式描述机器人文件。
XML是 被设计用来传输和存储数据的可扩展标记语言,注意语言本身是没有含义的,只是规定了其数据格式
比如说下面这段信息:
<robot name="阿童木"> <link name="大手臂">具体的描述</link> <joint name="胳膊肘">具体的描述</joint> <link name="小手臂">具体的描述</link> </robot>XML格式在线校验工具:在线代码格式化 (oschina.net)
XML格式注释: 标签:
robotlinkrobot标签的属性
name:<robot name="fishbot"></robot>robot标签的子标签
link:<robot name="fishbot"><link name="base_link"></link>link></robot>
使用XML定义的一个最简单的URDF模型可以像下面这样
<?xml version="1.0"?>
<robot name="fishbot">
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.18" radius="0.06"/>
</geometry>
</visual>
</link>
</robot>
接着我们从下面四个方面介绍URDF:
- URDF的组成介绍
- URDF-Link介绍
- URDF-Joint介绍
- 创建一个简单的URDF并在RVIZ2中可视化
1.URDF的组成介绍
一般情况下,URDF由声明信息和两种关键组件共同组成
1.1 声明信息
声明信息包含两部分,第一部分是xml的声明信息,放在第一行 第二部分是机器人的声明,通过robot标签就可以声明一个机器人模型
<?xml version="1.0"?>
<robot name="fishbot">
<link></link>
<joint></joint>
......
</robot>
1.2 两种关键组件(Joint&Link)
以FishBot机器人为例分析。观察下图机器人的结构。
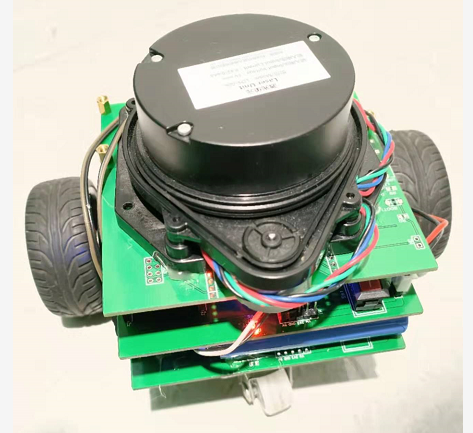
可以简化为如下五个部件组成:
躯体
左右轮子
支撑轮
雷达激光
IMU模块
这五个部件之间的固定方式为:
我们把左轮,右轮、支撑轮子,IMU和雷达部件称为机器人的Link
而Link和Link之间的连接部分称之为Joint关节
接着我们给每个link和joint取个名字。
所以我们就可以使用6个link和5个joint来描述这个机器人,接着我们分别对link和joint进行详细的介绍。
2.Link介绍
上面我们介绍完了link,那一个link该怎么写呢?
我们来看一个base_link的写法,通过link标签即可声明一个link,属性name指定部件名字
<link name="base_link">
</link>
通过两行代码就可以定义好base_link,但现在的base_link是空的,我们还要声明我们的base_link长什么样,通过visual子标签就可以声明出来机器人的visual形状。
<!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
</visual>
</link>
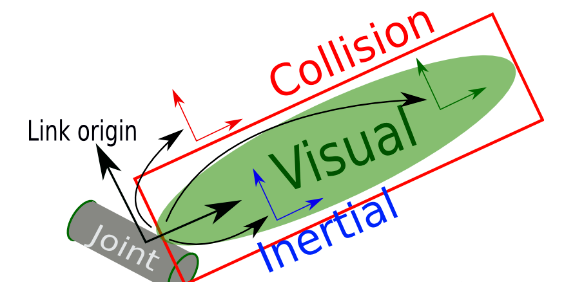
2.1 link标签定义
link的子标签列表
- visual 显示形状
<geometry>(几何形状)<box>长方体- 标签属性:
size-长宽高 - 举例:
<box size="1 1 1" />
- 标签属性:
<cylinder>圆柱体- 标签属性:
radius-半径length-高度 - 举例:
<cylinder radius="1" length="0.5"/>
- 标签属性:
sphere球体- 属性:
radius-半径 - 举例:
<sphere radius="0.015"/>
- 属性:
mesh第三方导出的模型文件- 属性:filename
- 举例:
<mesh filename="package://robot_description/meshes/base_link.DAE"/>
- origin (可选:默认在物体几何中心)
- 属性
xyz默认为零矢量rpy弧度表示的翻滚、俯仰、偏航 - 举例:
<origin xyz="0 0 0" rpy="0 0 0" />
- 属性
- material 材质
- 属性
name名字- color
- 属性
rgbaa代表透明度 - 举例:
<material name="white"><color rgba="1.0 1.0 1.0 0.5" /> </material>
- 属性
- color
- 属性
- collision 碰撞属性,仿真章节中讲解
- inertial 惯性参数 质量等,仿真章节中讲解
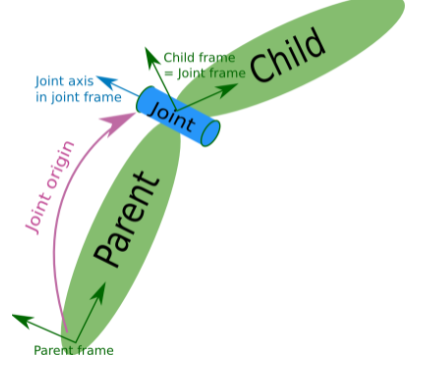
3.Joint介绍
joint为机器人关节,机器人关节用于连接两个机器人部件,主要写明父子关系
父子之间的连接类型,包括是否固定的,可以旋转的等
父部件名字
- 子部件名字
- 父子之间相对位置
- 父子之间的旋转轴,绕哪个轴转
比如我们再建立一个雷达部件laser_link,然后将laser_link固定到base_link
<?xml version="1.0"?>
<robot name="fishbot">
<!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
</visual>
</link>
<!-- laser link -->
<link name="laser_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</visual>
</link>
<!-- laser joint -->
<joint name="laser_joint" type="fixed">
<parent link="base_link"/>
<child link="laser_link"/>
<origin xyz="0 0 0.075"/>
</joint>
</robot>
3.1 joint标签详解
joint属性
- name 关节的名称
- type 关节的类型
- revolute: 旋转关节,绕单轴旋转,角度有上下限,比如舵机0-180
- continuous: 旋转关节,可以绕单轴无限旋转,比如自行车的前后轮
- fixed: 固定关节,不允许运动的特殊关节
- prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限
- planer: 平面关节,允许在xyz,rxryrz六个方向运动
- floating: 浮动关节,允许进行平移、旋转运动
joint的子标签
parent父link名称<parent link="base_link" />
child子link名称<child link="laser_link" />
origin父子之间的关系xyz rpy<origin xyz="0 0 0.014" />
axis围绕旋转的关节轴<axis xyz="0 0 1" />
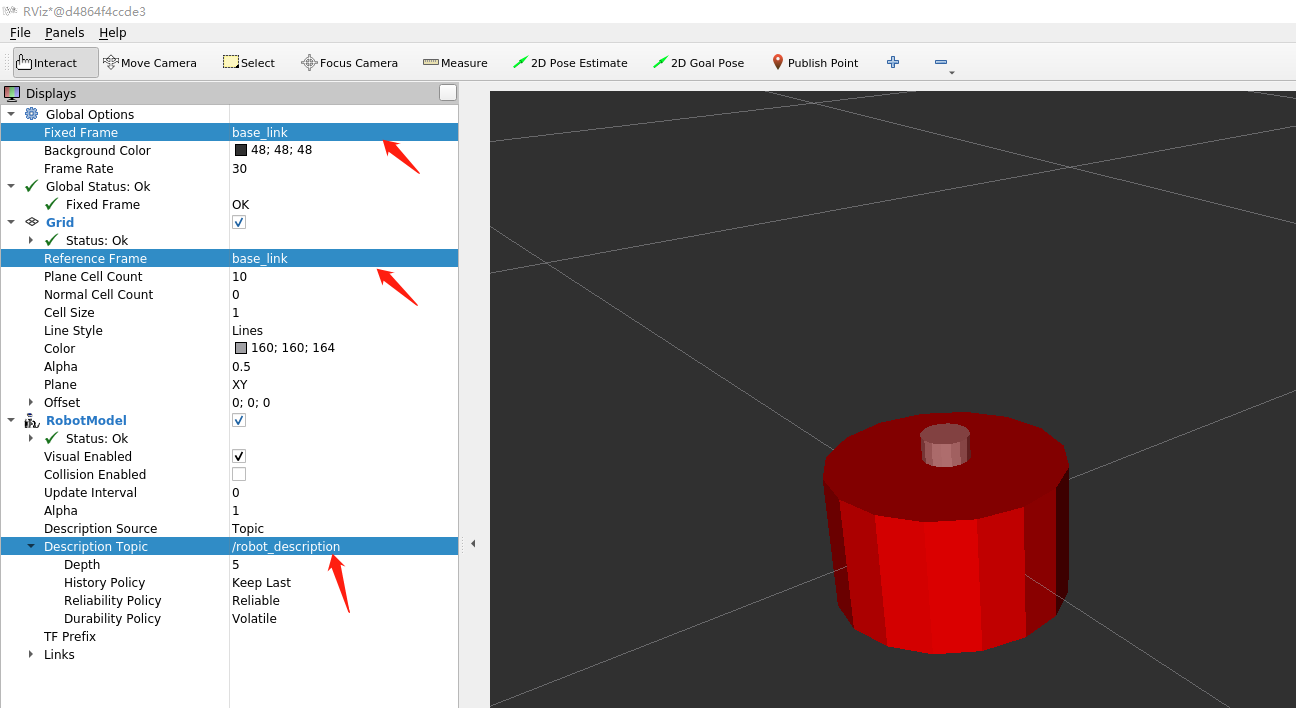
下一节我们尝试将我们的机器人模型在RVIZ2中显示出来
参考文档