datetime:2023/09/26 18:28
author:nzb
该项目来源于大佬的动手学ROS2
9.2.为机器人URDF模型注入物理属性
上节我们知道,机器人仿真就是用软件来模拟硬件的特性,那么我们必须要告诉仿真平台机器人各个关节的物理属性,比如:
- 有多重,
- 有多大的惯性
- 重心在哪
- 碰撞边界在哪
- 关节的上下界限
- 其他的一些必要信息等等
所以这节课就带你将物理信息写入到urdf中,让机器人在gazebo中显示出来。
1.需要哪些物理信息?
一般来说有碰撞和内参两个就够了,但是因为之前的偷懒,还要加一个摩擦力配置。
碰撞描述是物体的用于碰撞检测的包围形状。内参用于描述物体的质量,惯性矩阵。link的摩擦力。
1.1 碰撞检测
在机器人仿真中,我们要对物体之前是否接触,是否发生碰撞做检测,常用的检测方法比如包围盒,判断两个物体的包围盒是否相交来快速判断物体是否发生碰撞。
在URDF中,我们可以可以在link标签下添加collison子标签来对物体的形状进行描述。
collision可以包含的子标签如下:
- origin,表示碰撞体的中心位姿
- geometry,用于表示用于碰撞检测的几何形状
material,可选的,描述碰撞几何体的材料(这个设置可以在gazebo仿真时通过view选项看到碰撞包围体的形状)
一个完整的collision标签实例如下:
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5"/>
</material>
</collision>
1.2 旋转惯量
旋转惯量矩阵是用于描述物体的惯性的,在做动力学仿真的时候,这些参数尤为重要。
在URDF中我们可以通过在link下添加inertial子标签,为link添加惯性参数的描述。
intertial标签包含的子标签如下:
- mass,描述link的质量
- inertia,描述link的旋转惯量(该标签有六个属性值ixx\ixy\ixz\iyy\iyz\izz)
一个完整的inertial标签示例如下:
<inertial>
<mass value="0.2"/>
<inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/>
</inertial>
关于intertial的属性设置,不是随意设置的,常见的几何体我们可以通过公式进行计算。计算方法可以看的这篇文章-URDF仿真惯性参数不知道怎么配?快收藏,常见几何物体URDF分享。
比如我们上一章节的fishbot的轮子和车体,都是实心圆柱,可以采用下面的公式进行计算:
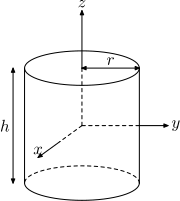
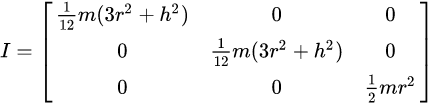
注意:这个矩阵是一个对称矩阵,所以只需要通过其上三角即可描述完整描述这个矩阵,所以在URDF中只需要填写六个数字即可。 实心圆柱体的惯性矩阵:半径为r,高度为h,质量为m 的实心圆柱体
形状:
矩阵:
1.3 摩擦力和刚性系数
在Fishbot的URDF中,前面的支撑轮主要起支撑作用,因为我们将其使用fixed标签固定到了base_link上,所以它无法转动。
哪该怎么办呢?教你一个取巧的办法,我们可以要把这个轮子的摩擦力设置为0,让它直接在地上滑动即可,
如何设置呢?6行代码放到URDF中:
<gazebo reference="caster_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000.0" />
<kd value="10.0" />
</gazebo>
其中mu1,mu2代表摩擦力,kp,kd代表刚性系数。
2.为FishBot添加物理惯性
利用上面的方法公式,为我们的fishbot个个link添加好物理属性,完成后的base_link如下:
<!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5"/>
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/>
</inertial>
</link>
完全添加好的机器人URDF模型
<?xml version="1.0"?>
<robot name="fishbot">
<!-- Robot Footprint -->
<link name="base_footprint"/>
<joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0.0 0.0 0.076" rpy="0 0 0"/>
</joint>
<!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5"/>
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/>
</inertial>
</link>
<!-- laser link -->
<link name="laser_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link>
<!-- laser joint -->
<joint name="laser_joint" type="fixed">
<parent link="base_link"/>
<child link="laser_link"/>
<origin xyz="0 0 0.075"/>
</joint>
<link name="imu_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link>
<!-- imu joint -->
<joint name="imu_joint" type="fixed">
<parent link="base_link"/>
<child link="imu_link"/>
<origin xyz="0 0 0.02"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link>
<joint name="left_wheel_joint" type="continuous">
<parent link="base_link"/>
<child link="left_wheel_link"/>
<origin xyz="-0.02 0.10 -0.06"/>
<axis xyz="0 1 0"/>
</joint>
<joint name="right_wheel_joint" type="continuous">
<parent link="base_link"/>
<child link="right_wheel_link"/>
<origin xyz="-0.02 -0.10 -0.06"/>
<axis xyz="0 1 0"/>
</joint>
<link name="caster_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</collision>
<inertial>
<mass value="0.02"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link>
<joint name="caster_joint" type="fixed">
<parent link="base_link"/>
<child link="caster_link"/>
<origin xyz="0.06 0.0 -0.076"/>
<axis xyz="0 1 0"/>
</joint>
<gazebo reference="caster_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="caster_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000.0"/>
<kd value="10.0"/>
<!-- <fdir1 value="0 0 1"/> -->
</gazebo>
<gazebo>
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/</namespace>
<remapping>cmd_vel:=cmd_vel</remapping>
<remapping>odom:=odom</remapping>
</ros>
<update_rate>30</update_rate>
<!-- wheels -->
<!-- <left_joint>left_wheel_joint</left_joint> -->
<!-- <right_joint>right_wheel_joint</right_joint> -->
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<!-- kinematics -->
<wheel_separation>0.2</wheel_separation>
<wheel_diameter>0.065</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>false</publish_wheel_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin>
<plugin name="fishbot_joint_state" filename="libgazebo_ros_joint_state_publisher.so">
<ros>
<remapping>~/out:=joint_states</remapping>
</ros>
<update_rate>30</update_rate>
<joint_name>right_wheel_joint</joint_name>
<joint_name>left_wheel_joint</joint_name>
</plugin>
</gazebo>
<gazebo reference="laser_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="imu_link">
<sensor name="imu_sensor" type="imu">
<plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin">
<ros>
<namespace>/</namespace>
<remapping>~/out:=imu</remapping>
</ros>
<initial_orientation_as_reference>false</initial_orientation_as_reference>
</plugin>
<always_on>true</always_on>
<update_rate>100</update_rate>
<visualize>true</visualize>
<imu>
<angular_velocity>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</z>
</angular_velocity>
<linear_acceleration>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</z>
</linear_acceleration>
</imu>
</sensor>
</gazebo>
<gazebo reference="laser_link">
<sensor name="laser_sensor" type="ray">
<always_on>true</always_on>
<visualize>true</visualize>
<update_rate>5</update_rate>
<pose>0 0 0.075 0 0 0</pose>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1.000000</resolution>
<min_angle>0.000000</min_angle>
<max_angle>6.280000</max_angle>
</horizontal>
</scan>
<range>
<min>0.120000</min>
<max>3.5</max>
<resolution>0.015000</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so">
<ros>
<!-- <namespace>/tb3</namespace> -->
<remapping>~/out:=scan</remapping>
</ros>
<output_type>sensor_msgs/LaserScan</output_type>
<frame_name>laser_link</frame_name>
</plugin>
</sensor>
</gazebo>
</robot>
可以将配置好的模型下载到src/c/urdf文件夹下,等下我们要用gazebo将该模型显示出来。