datetime:2023/10/24 10:23
author:nzb
该项目来源于大佬的动手学ROS2
2.MicroROS-话题发布实现
本节将学习在开发板上实现话题的发布,最终实现通过话题发布当前开发板的电池电量信息,关于电量信息的测量,请参考:电池电压测量-学会使用ADC
一、新建工程添加依赖
新建example12_microros_topic_pub工程
修改platformio.ini添加依赖
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
lib_deps =
https://gitee.com/ohhuo/micro_ros_platformio.git
二、编写代码-实现订阅
编辑main.cpp,代码如下,注释已经添加到代码中来了
#include <Arduino.h>
#include <micro_ros_platformio.h>
#include <rcl/rcl.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
// 添加头文件
#include <std_msgs/msg/float32.h>
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
rcl_timer_t timer;
// 声明话题发布者
rcl_publisher_t publisher;
// 声明消息文件
std_msgs__msg__Float32 pub_msg;
// 定义定时器接收回调函数
void timer_callback(rcl_timer_t *timer, int64_t last_call_time)
{
RCLC_UNUSED(last_call_time);
if (timer != NULL)
{
rcl_publish(&publisher, &pub_msg, NULL);
}
}
void setup()
{
Serial.begin(115200);
// 设置通过串口进行MicroROS通信
set_microros_serial_transports(Serial);
// 延时时一段时间,等待设置完成
delay(2000);
// 初始化内存分配器
allocator = rcl_get_default_allocator();
// 创建初始化选项
rclc_support_init(&support, 0, NULL, &allocator);
// 创建节点 topic_sub_test
rclc_node_init_default(&node, "topic_pub_test", "", &support);
// 订阅者初始化
rclc_publisher_init_default(
&publisher,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Float32),
"battery_voltage");
// 创建定时器,200ms发一次
const unsigned int timer_timeout = 200;
rclc_timer_init_default(
&timer,
&support,
RCL_MS_TO_NS(timer_timeout),
timer_callback);
// 创建执行器
rclc_executor_init(&executor, &support.context, 1, &allocator);
// 给执行器添加定时器
rclc_executor_add_timer(&executor, &timer);
// 初始化ADC
pinMode(34, INPUT);
analogSetAttenuation(ADC_11db);
}
void loop()
{
delay(100);
// 循环处理数据
rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100));
// 通过ADC获取电压值
int analogValue = analogRead(34); // 读取原始值0-4096
int analogVolts = analogReadMilliVolts(34); // 读取模拟电压,单位毫伏
float realVolts = 5.02 * ((float)analogVolts * 1e-3); // 计算实际电压值
pub_msg.data = realVolts;
}
三、代码注解
相比之前的节点代码这里主要多了这几行
#include <std_msgs/msg/float32.h>包含flaot32类型头文件rcl_publisher_t publisher; 定义发布者std_msgs__msg__Float32 pub_msg; 定义发布消息,也需要提前定义void timer_callback(rcl_timer_t *timer, int64_t last_call_time)定义定时器回调函数,当我们需要以某个频率做什么的时候定时器可以派上用场rclc_publisher_init_default初始化发布者rclc_timer_init_default 初始化定时器rclc_executor_add_timer 给执行器添加一个定时器回调
四、下载测试
4.1 编译下载
连接开发板,编译下载。
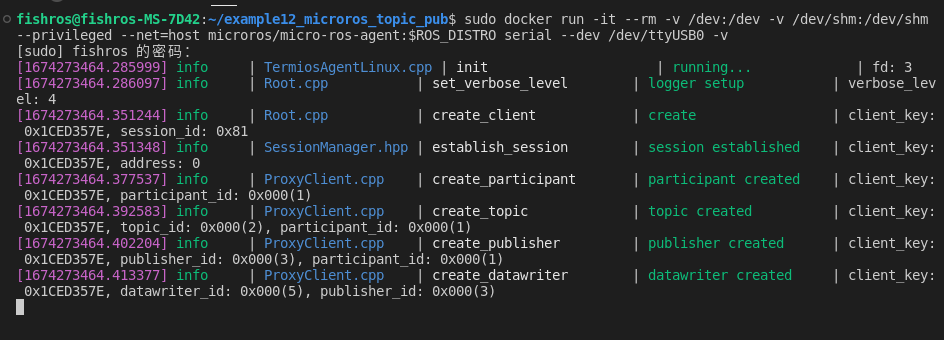
4.2 启动Agent服务
接着打开终端启动agent
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO serial --dev /dev/ttyUSB0 -v
点击下RST按钮,重启开发板,正常可以看到下图内容
4.3 测试是否连通
ros2 node list
ros2 topic list

4.4 查看话题数据
ros2 topic echo /battery_voltage
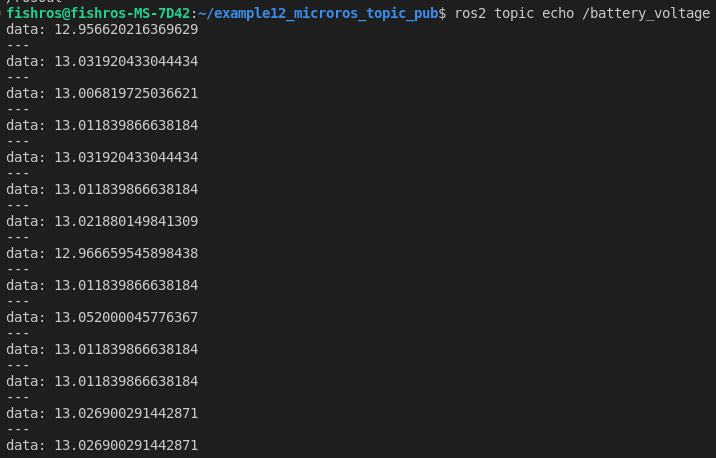
这里连接了小车的电池,VM电压代表电池电压,符合正常电压值范围。
同时可以使用下面指令测量话题频率
fishros@fishros-MS-7D42:~/example12_microros_topic_pub$ ros2 topic hz /battery_voltage
average rate: 4.828
min: 0.207s max: 0.208s std dev: 0.00021s window: 6
average rate: 5.034
min: 0.106s max: 0.208s std dev: 0.02793s window: 12
average rate: 4.973
min: 0.106s max: 0.208s std dev: 0.02378s window: 17
average rate: 4.941
min: 0.106s max: 0.208s std dev: 0.02104s window: 22
average rate: 5.005
min: 0.106s max: 0.208s std dev: 0.02594s window: 28
average rate: 4.977
min: 0.106s max: 0.208s std dev: 0.02404s window: 33
average rate: 4.958
min: 0.106s max: 0.208s std dev: 0.02249s window: 38
average rate: 4.997
min: 0.106s max: 0.208s std dev: 0.02541s window: 44
五、总结
本节我们通过电量信息发布例程,学习了如何在开发板上实现话题发布流程。下一节我们开始尝试在开发板上建立服务端,尝试服务通信。