datetime:2023/10/24 10:23
author:nzb
该项目来源于大佬的动手学ROS2
1.话题订阅-控制LED
你好,我是爱吃鱼香ROS的小鱼。本节我们正式进入到MicroROS的核心通信部分的学习中来,本节我们将通过话题订阅实现,通过话题控制LED的亮灭。
一、新建工程添加依赖
新建example11_microros_topic_sub工程
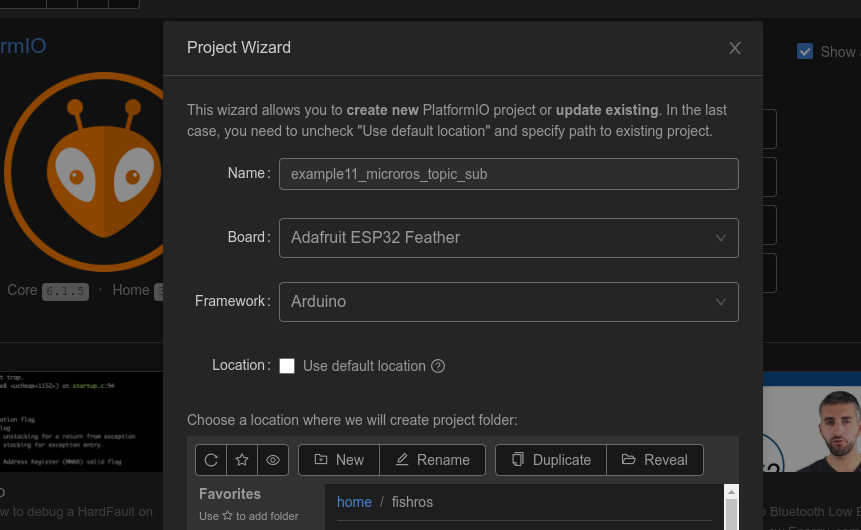
修改platformio.ini添加依赖
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
lib_deps =
https://gitee.com/ohhuo/micro_ros_platformio.git
二、编写代码-实现订阅
编辑main.cpp,代码如下,注释小鱼已经添加到代码中来了
#include <Arduino.h>
#include <micro_ros_platformio.h>
#include <rcl/rcl.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <std_msgs/msg/int32.h>
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
// 声明话题订阅者
rcl_subscription_t subscriber;
// 声明消息文件
std_msgs__msg__Int32 sub_msg;
// 定义话题接收回调函数
void callback_subscription_(const void *msgin)
{
const std_msgs__msg__Int32 *msg = (const std_msgs__msg__Int32 *)msgin;
if (msg->data == 0)
{
digitalWrite(2, HIGH);
}
else
{
digitalWrite(2, LOW);
}
}
void setup()
{
Serial.begin(115200);
// 设置通过串口进行MicroROS通信
set_microros_serial_transports(Serial);
// 延时时一段时间,等待设置完成
delay(2000);
// 初始化内存分配器
allocator = rcl_get_default_allocator();
// 创建初始化选项
rclc_support_init(&support, 0, NULL, &allocator);
// 创建节点 topic_sub_test
rclc_node_init_default(&node, "topic_sub_test", "", &support);
// 订阅者初始化
rclc_subscription_init_default(
&subscriber,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32),
"led_control");
// 创建执行器
rclc_executor_init(&executor, &support.context, 1, &allocator);
// 为执行器添加一个订阅者
rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &callback_subscription_, ON_NEW_DATA);
// 初始化LED
pinMode(2, OUTPUT);
}
void loop()
{
delay(100);
// 循环处理数据
rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100));
}
三、代码注解
相比之前的节点代码这里主要多了这几行
#include <std_msgs/msg/int32.h>添加消息类型头文件rcl_subscription_t subscriber;声明话题订阅者std_msgs__msg__Int32 sub_msg;声明消息文件,这一点和上位机不同,因为内存紧缺,所以提前定义void callback_subscription_(const void *msgin)接收到数据的回调函数rclc_subscription_init_default初始化话题订阅者rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &callback_subscription_, ON_NEW_DATA);,为执行器添加一个订阅者
四、下载测试
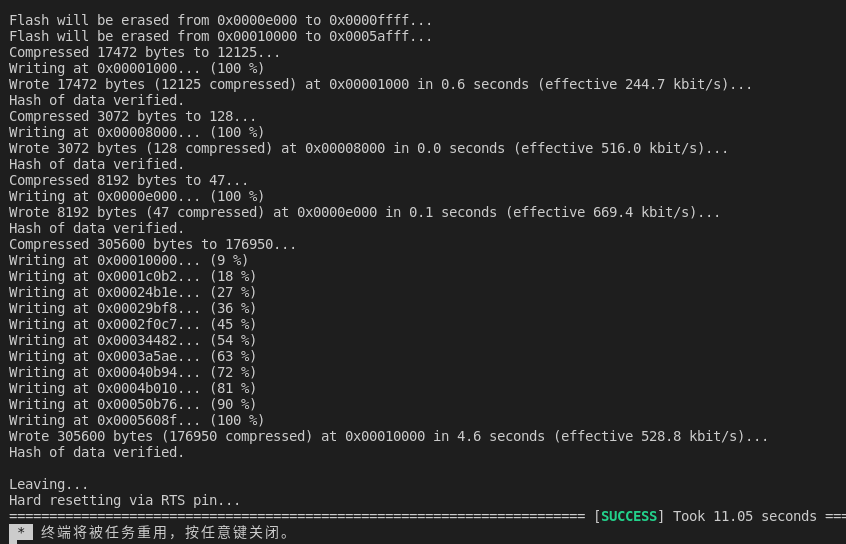
4.1 编译下载
连接开发板,编译下载。
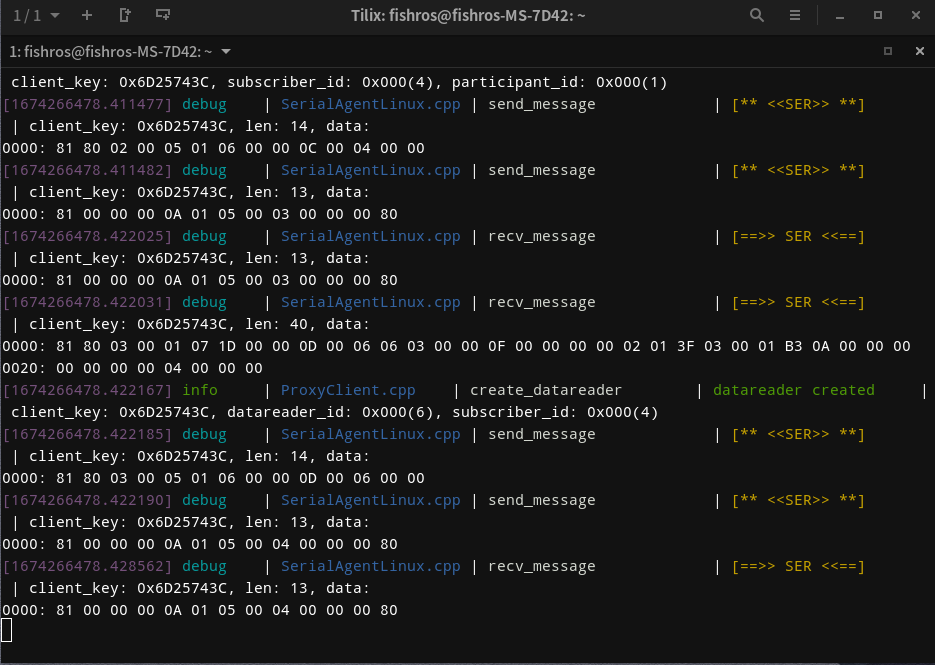
4.2 启动Agent
接着打开终端启动agent
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO serial --dev /dev/ttyUSB0 -v
点击下RST按钮,重启开发板,正常可以看到下图内容
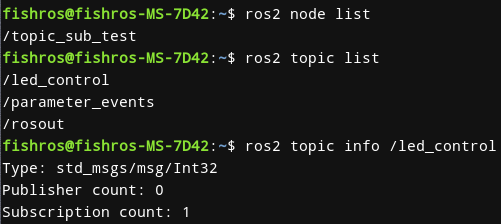
4.3 查看是否连通
接着打开终端查看节点和话题
ros2 node list
ros2 topic list
4.4 测试控制
关闭LED
ros2 topic pub /led_control std_msgs/msg/Int32 "{data: 0}" --once
打开LED
ros2 topic pub /led_control std_msgs/msg/Int32 "{data: 1}" --once
五、总结
本节我们通过话题订阅,实现对开发板上LED的控制,下一节我们将尝试读取开发板上的VM引脚电压,并将其通过话题发布到上位机中。