datetime:2023/10/10 11:03
author:nzb
该项目来源于大佬的动手学ROS2
1.地图文件介绍
1.地图数据文件.pgm介绍
OccupancyGrid由一个.yaml格式的元数据文件,和.pgm图片格式的地图数据文件组成。从上节课建图后保存的文件也可以看出。
.
├── fishbot_map.pgm
└── fishbot_map.yaml
0 directories, 2 files

打开上节课建好的地图,观察下,你应该会有几点疑问:
- 不是说占据栅格地图每个栅格都有一个概率吗?为什么看不出来?
- 立方体内和圆柱体内和墙之外的区域为什么是灰色的?
原因如下:
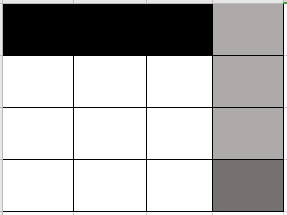
- 一个栅格对应到图片上其实是一个像素,每一个像素的值在0-255之间,所以将像素值和占据率之间的映射即可,而像素值反应到图像上就是颜色的深浅,1.2图对应的像素颜色如下:
- 建图的时候物体内和墙之外的区域机器人并没有探索到,没有数据参考就认为其值是未知的。
2.地图描述文件.yaml介绍
除了fishbot_map.pgm文件外,还有另外一个fishbot_map.yaml的文件,fishbot_map.yaml文件是地图的配置文件,该文件内容如下:
image: fishbot_map.pgm
mode: trinary
resolution: 0.05
origin: [ -3.37, -2.88, 0 ]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.25
image:图像名称
mode:图像模式,默认为trinary(三进制),还有另外两个可选项scale(缩放的)和raw(原本的值)。
resolution:分辨率,一个栅格对应的物理尺寸,单位为m。0.05则表示一个栅格为0.05m
origin:地图原点位置,单位是m。
negate:是否反转图像
cooupied_thresh:占据阈值
free_thresh:空闲阈值
如何在地图上找出机器人原点的像素位置?
1、图像的像素原点在左下角
2、借张图左边的
0,0是地图原点,右边的图0,0是图像的像素原点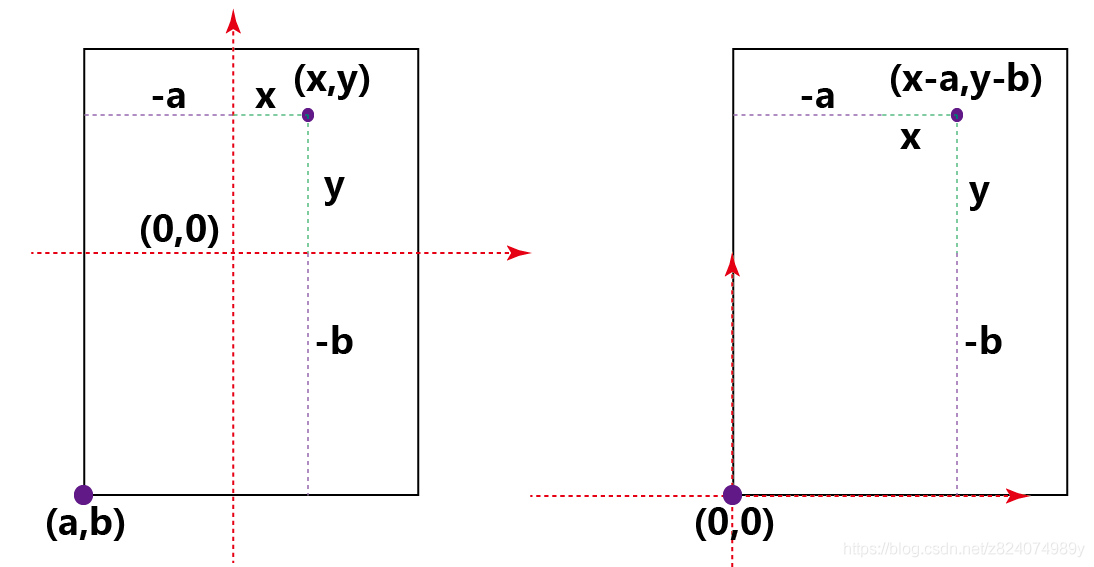
3、假如机器人地图原点是[-3.37m, -2.88m],除上分辨率则可得到像素原点[-67.4px,-57.6px]。
地图原点在x和y轴分别偏移[-67.4px,-57.6px] 就到了像素原点,反过来说,地图原点就在像素原点的[67.4px,57.6px]处。4、转换公式
- 像素点转地图点:地图点 = 地图原点 + (像素点 * 分辨率)
- 地图点转像素点:像素点= (地图点 - 地图原点) / 分辨率
拓展
- Trinary(三进制)模式:
这种模式通常用于表示地图中的障碍物信息。可能有三种值,比如0表示自由空间,1表示障碍物,2表示未知区域。这样的表示方式对于一些算法(如路径规划)可能更易于处理。- Scale(缩放的)模式:
这种模式可能涉及到对地图数据进行缩放,以适应不同的需求或分辨率。缩放可以是线性的,也可以是非线性的,具体取决于实现。缩放的模式可能用于调整地图的精度或分辨率,以便在不同的应用场景中使用。- Raw(原本的值)模式:
这种模式可能表示地图数据的原始值,没有经过额外的处理或缩放。在这种模式下,地图数据通常以原始的形式进行存储和表示。这些模式的选择可能取决于具体的应用场景和算法需求。例如,在进行路径规划时,使用trinary模式可能更方便,而在进行地图可视化时,可能会选择使用缩放或原始值模式。
3.地图加载
3.1 启动地图
了解完地图的格式和描述文件,接着我们看看如何将地图加载到rviz2中进行显示。我们使用nav2_map_server进行地图的保存,也可以使用它来加载地图。
打开终端,进入src/map/运行下面指令:
#启动cartographer
ros2 launch fishbot_cartographer cartographer.launch.py
# 启动地图
ros2 run nav2_map_server map_server --ros-args --param yaml_filename:=fishbot_map.yaml
其中--ros-args --param yaml_filename:=fishbot_map.yaml指定地图描述文件名称.fishbot_map.yaml。
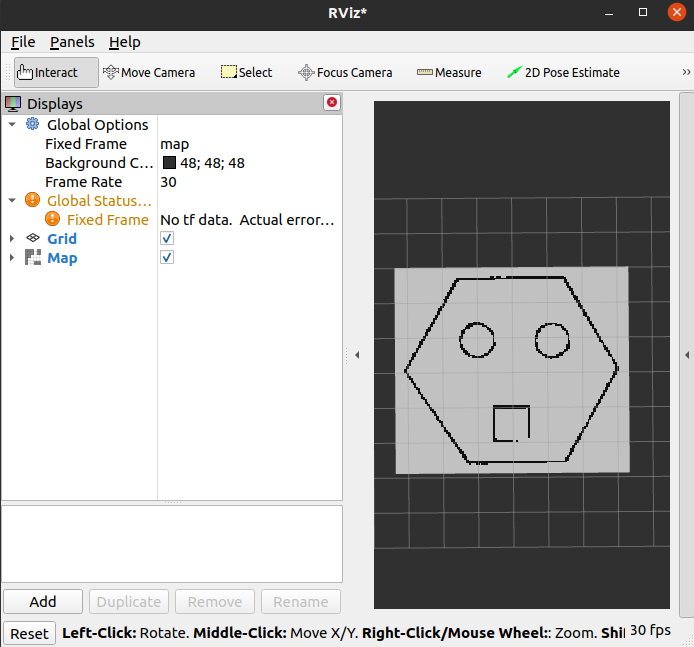
3.2 打开rviz2
打开终端
rviz2
通过add->bytopic->选择map组件。此时你应该什么都看不到,没关系,这是正常的。
3.3 配置并激活map_server
map_server节点采用的是ROS2的生命周期进行编写的,除了启动节点,我们还需要手动的配置和激活节点才能使用。
打开新的终端,使用下面指令进行配置:
ros2 lifecycle set /map_server configure
使用下面的指令进行激活:
ros2 lifecycle set /map_server activate
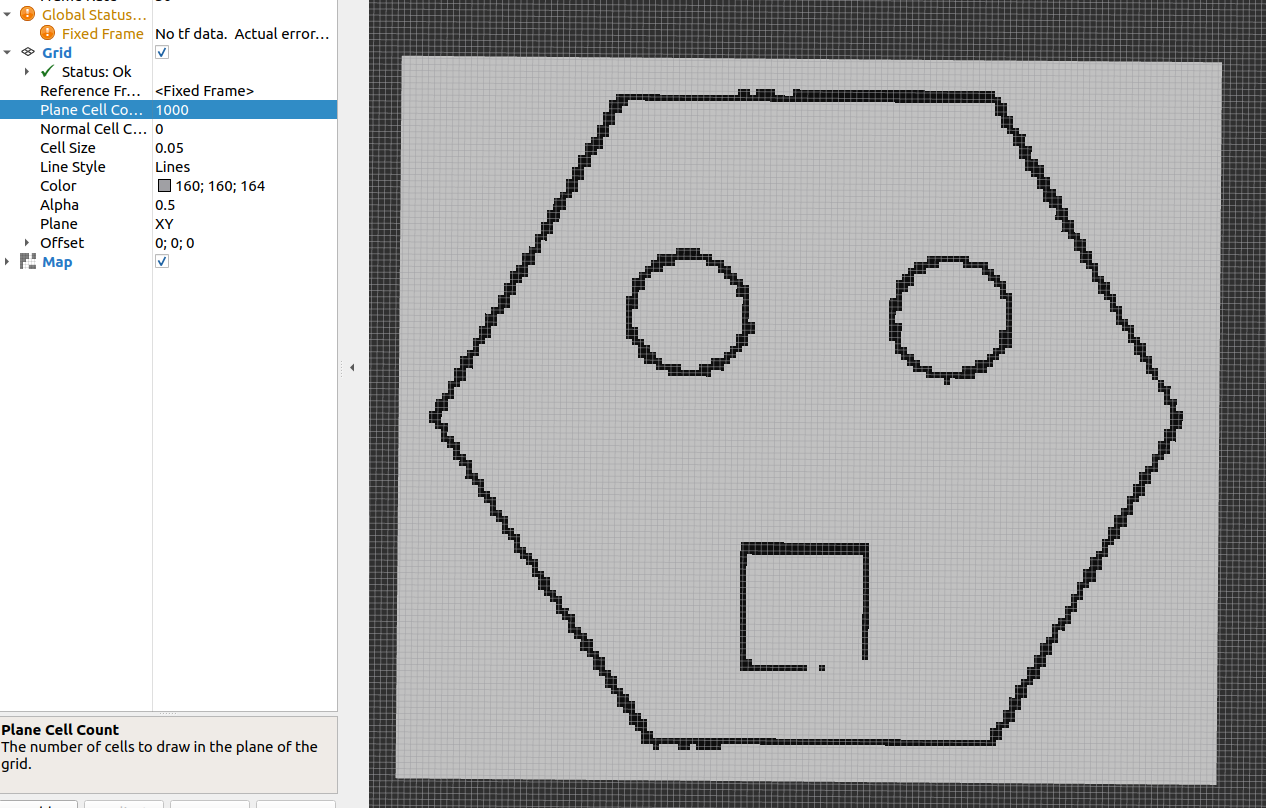
完成这一步,你应该就可以在rviz2中看到地图了。
将栅格数量改大,然后将Grid的cellsize改成0.05,你就可以看到我们之间建立的地图每一个栅格的占据情况了。
生命周期节点转换图如下:

4.地图编辑
最后我们来说一下如何对地图进行编辑,地图编辑的方法有很多,你可以手动改图片,也可以通过opencv等图像处理库进行图像的去除噪点等操作。
这里介绍的是手动添加一个地图用PS进行编辑 。
打开网址:https://www.gaituya.com/ps/
接着点击文件打开选择我们的.pgm文件,即可看到下图。

接着将下面的正方形给补上。
保存后在文件选择导出为png格式即可,因为PS并不支持pgm格式的导出,所以我们选择png格式,幸运的是png格式的地图也是被map_server所支持的。
把导出的图片放到map文件夹下,接着我们需要修改下yaml配置文件中图片的后缀。
image: fishbot_map.png
mode: trinary
resolution: 0.05
origin: [-3.37, -2.88, 0]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.25
接着你可以重新运行下map_server(记得先关闭rviz2),然后看一下map是否发生了改变。
5. 总结
本节我们主要学习了地图的相关概念以及加载和编辑的方式,下一节我们就开始正式学习Nav2导航框架。
参考文章: