datetime:2023/02/07 17:18
author:nzb
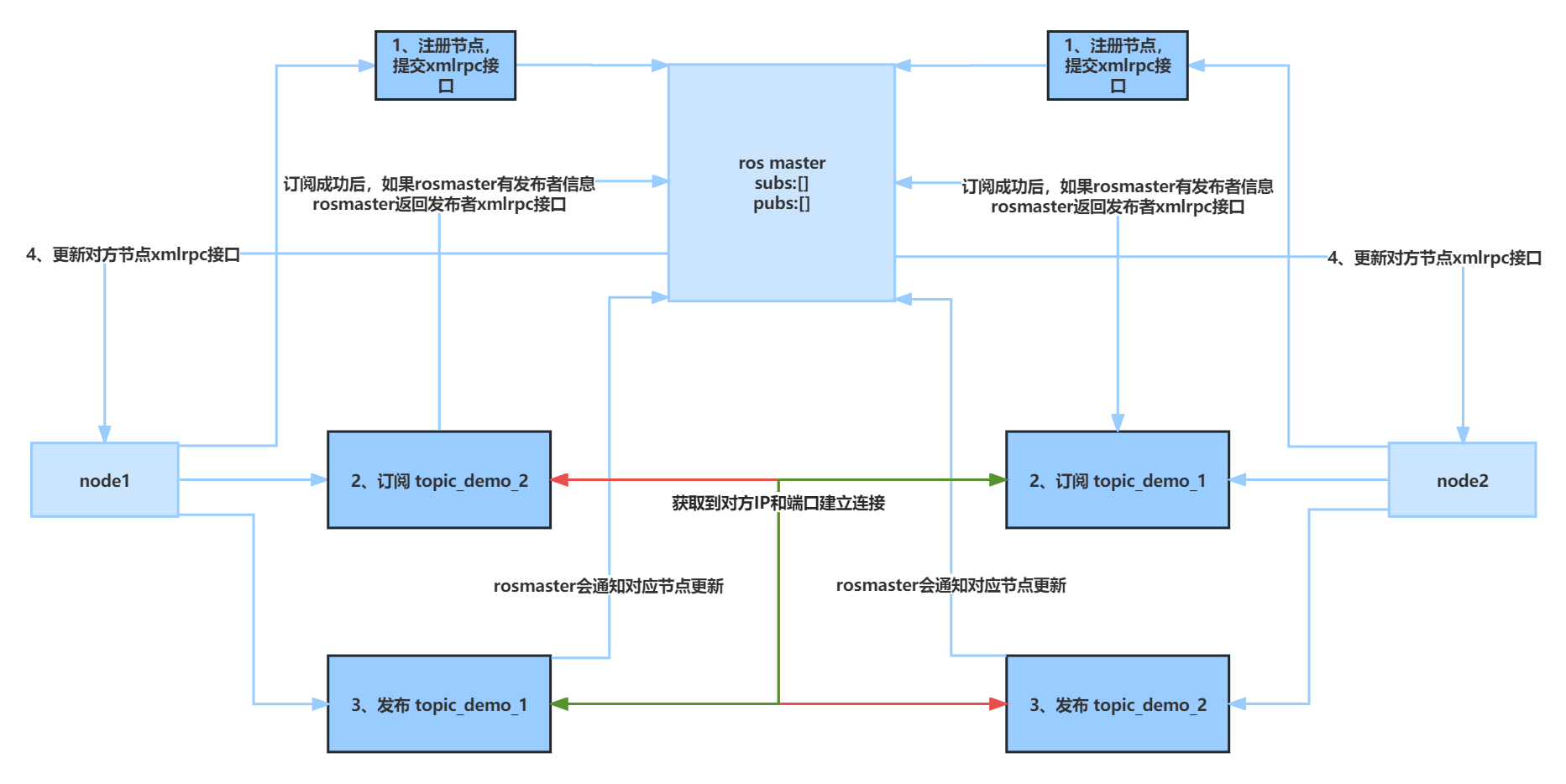
4、topic
4.1、流程
执行顺序:rosmaster -> topic_demo_node_1 -> topic_demo_node_2
topic_demo_node_1节点初始化topic_demo_2订阅topic_demo_1发布topic_demo_node_2节点初始化topic_demo_1订阅topic_demo_2发布
4.1.1、topic_demo_node_1(topic_demo_node_2) 节点初始化流程
init_node()->start_node():初始化启动节点init_tcpros()->init_tcpros_server()->_tcpros_server=TCPROSServer():只是初始化(未启动)_tcpros_server并设置topic_connection_handler和service_connection_handlerXmlRpcNode()->start()->_run_init():初始化XmlRpc服务相关信息ROSHandler()._ready()RegManager().start():开线程向ros_master注册节点RegistrationListeners().add_listener(self):把RegManager()实例添加到RegistrationListeners()实例的listeners属性中,用于更新状态run():死循环,一个一个取updates属性的数据,开线程连接topic_connect_topic_thread()->ROSHandler()._connect_topic():下面有完整流程
serve_forever():开启XmlRpc服务
4.1.2、topic_demo_node_1 中发布订阅流程
前置条件:上面节点已经初始化完成
4.1.2.1 订阅 topic_demo_2
Subscriber()- 父类的构造函数中执行
_TopicManager()->acquire_impl()->_add():创建_SubscriberImpl实例RegistrationListeners()->notify_added()- 遍历
RegistrationListeners()实例的listeners属性,其值都是RegManager()实例 - 执行
RegManager()实例的reg_added()->xmlrpcapi(master_uri).registerSubscriber():向ros_master注册订阅- 主节点:
master_api.ROSMasterHandler().registerSubscriber()- 注册订阅:
RegistrationManager().register_subscriber()_register()_register_node_api():创建或更新节点信息Registrations().register():更新Registrations()实例的map或service_api_map属性map数据内容为:{ key: [(caller_id, caller_api)] }:key为topic名称,caller_id为节点名称(ID),caller_api为节点XmlRpc服务接口service_api_map数据内容为:{ key: (caller_id, caller_api) }:key为服务名称,caller_id为节点名称(ID),caller_api为TCPROS服务链接
- 返回发布的节点列表:
ROSMasterHandler().RegistrationManager().publishers.get_apis():返回对应topic的发布节点XmlRpc列表,publishers为Registrations实例,
- 注册订阅:
- 主节点:
publisher_update():rosmaster节点会返回发布该topic的所有XmlRpc链接列表,此操作会更新updates属性,目前node_2还未初始化,所以到这就结束了
- 遍历
- 父类的构造函数中执行
4.1.2.2 发布 topic_demo_1
Publisher()- 父类的构造函数中执行
_TopicManager()->acquire_impl()->_add():创建_PublisherImpl实例RegistrationListeners()->notify_added()- 遍历
RegistrationListeners()实例的listeners属性,其值都是RegManager()实例 - 执行
RegManager()实例的reg_added()->xmlrpcapi(master_uri).registerPublisher():向ros_master注册发布master_api.ROSMasterHandler().registerPublisher()- 注册发布:
RegistrationManager().register_publisher()_register()_register_node_api():创建或更新节点信息Registrations().register():更新Registrations()实例的map或service_api_map属性map数据内容为:{ key: [(caller_id, caller_api)] }:key为topic名称,caller_id为节点ID,caller_api为节点XmlRpc服务接口service_api_map数据内容为:{ key: (caller_id, caller_api) }:key为服务名称,caller_id为节点ID,caller_api为节点XmlRpc服务接口
pub_uris = self.publishers.get_apis(topic):获取发布节点XmlRpc服务接口sub_uris = self.subscribers.get_apis(topic):获取订阅节点XmlRpc服务接口- 通知订阅节点并返回订阅节点列表:
_notify_topic_subscribers()->publisher_update_task():目前node_2还未初始化,所以还没有订阅,如果有走下面流程xmlrpcapi(api).publisherUpdate('/master', topic, pub_uris)api为订阅节点的XmlRpc接口- 该方法通知对应节点更新发布节点的
XmlRpc链接:ROSHandler().publisherUpdate()RegManager().publisher_update():更新RegManager实例的updates属性updates属性,在RegManager实例方法run中一直监听创建连接线程,_connect_topic_thread
- 注册发布:
- 遍历
- 父类的构造函数中执行
Publisher().publish(String("topic_demo_1")):开启循环发送数据_PublisherImpl().publish()->QueuedConnection().write_data()->TCPROSTransport().write_data()->self.socket.sendall(data):socket发送数据
4.1.3、topic_demo_node_2 中发布订阅流程
前置条件:上面节点已经初始化完成
4.1.3.1 订阅 topic_demo_1
- 初始化跟上面的
订阅 topic_demo_2流程一样,最后rosmaster会返回发布该topic的所有XmlRpc链接列表,最后更新updates属性 topic_demo_node_2节点初始化流程中,RegManager().start():开线程向ros_master注册节点,最后执行了死循环run()topic, uris = self.updates.pop():从updates取出topic和XmlRpc链接get_topic_manager().check_all():移除异常断连的连接self._connect_topic_thread(topic, uri):遍历urls启连接topic线程,每个topic启一个线程ROSHandler()._connect_topic(topic, uri)xmlrpcapi(pub_uri, cache=False).requestTopic():请求发布节点的接口- 以下为发布节点内的操作
TCPROSHandler().init_publisher()->start_tcpros_server():开启节点启动时初始化的TCPROSServer()TCPROSServer().start_server()->TCPServer().start()-> 启线程执行run()accept()接收TCP客户端TCPROSServer()._tcp_server_callback(client_sock, client_addr)read_ros_handshake_header():读取请求头- 根据请求头区分
topic或service,执行topic_connection_handler或service_connection_handler- topic:
TCPROSHandler().topic_connection_handler()_TopicManager()._PublisherImpl:通过topic获取到对应实例,实例有数据类型等参数protocol = TCPROSPub():数据传输协议transport = TCPROSTransport():TCPROS用于topic和service交互_PublisherImpl().add_connection(transport):父类对比连接者的XmlRpc接口或socker描述符,看是否已经存在连接,存在移除,否则重新添加c = QueuedConnection(c, self.queue_size):实例化队列连接,内部启线程死循环执行_run,使用TCPROSTransport().write_data发送队列数据
- service:
rospy.impl.tcpros_service.service_connection_handler()
- topic:
- 发布节点返回给订阅节点:
['TCPROS', 'pf2gf7kc', 60978],通讯协议、ip、端口
- 以下为发布节点内的操作
- 收到发布节点的结果后订阅节点操作
TCPROSHandler().create_transport()_TopicManager()._SubscriberImpl:通过topic获取到对应订阅实例,实例有数据类型等参数protocol = TCPROSSub():数据传输协议- 启线程执行
robust_connect_subscriber- 参数:
TCPROSTransport连接实例、目标IP、目标端口、发布者XmlRpc链接、回调函数、topic名称 TCPROSTransport().connect:socket连接,一直尝试,失败会检测发布者发布链接列表实例数量是否改变了- 连接成功执行:
TCPROSTransport().receive_loop(receive_cb):receive_cb用户指定的回调函数,该函数死循环接收数据,然后执行回调函数
- 参数:
_SubscriberImpl().add_connection(transport):父类对比连接者的XmlRpc接口或socker描述符,看是否已经存在连接,存在移除,否则重新添加,添加成功开启线程
4.1.4、rosout发布初始化
init_node()init_rosout()->Publisher():初始化/rosout用于发布日志Publisher父类的构造函数中执行_TopicManager()->acquire_impl()->_add():创建_PublisherImpl或_SubscriberImpl实例RegistrationListeners()->notify_added()- 遍历
RegistrationListeners()实例的listeners属性,其值都是RegManager()实例 - 执行
RegManager()实例的reg_added()->xmlrpcapi(master_uri).registerPublisher():向ros_master注册发布master_api.ROSMasterHandler().registerPublisher()RegistrationManager().register_publisher()_notify_topic_subscribers()->publisher_update_task()xmlrpcapi(api).publisherUpdate('/master', topic, pub_uris)- api为
rosout的XmlRpc接口 - 该方法通知
rosout节点更新发布节点的XmlRpc链接
- api为
ROSHandler().publisherUpdate()RegManager().publisher_update():更新RegManager实例的updates属性updates属性,在RegManager实例方法run中一直监听创建连接线程,_connect_topic_thread
- 遍历
4.2、代码
master.py
import rosmaster
if __name__ == '__main__':
rosmaster.rosmaster_main(["--core"])
topic_demo_node_1.py
import threading
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('topic_demo_1', String, queue_size=10)
# 更新频率是1hz
rate = rospy.Rate(1)
while not rospy.is_shutdown():
# 计算距离
pub.publish(String("topic_demo_1"))
rate.sleep()
def callback(data):
rospy.loginfo(data)
def main():
# 订阅
rospy.Subscriber('topic_demo_2', String, callback)
# 发布
threading.Thread(target=talker).start()
if __name__ == '__main__':
rospy.init_node('topic_demo_node_1', anonymous=True, log_level=rospy.DEBUG)
main()
rospy.spin()
topic_demo_node_2.py
import threading
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('topic_demo_2', String, queue_size=10)
# 更新频率是1hz
rate = rospy.Rate(1)
while not rospy.is_shutdown():
# 计算距离
pub.publish(String("topic_demo_2"))
rate.sleep()
def callback(data):
rospy.loginfo(data)
def main():
# 订阅
rospy.Subscriber('topic_demo_1', String, callback)
# 发布
threading.Thread(target=talker).start()
if __name__ == '__main__':
rospy.init_node('topic_demo_node_2', anonymous=True, log_level=rospy.DEBUG)
main()
rospy.spin()
4.3、日志
# rosmaster 启动日志
2023-02-09 14:44:08 - main - 25908 - INFO : initialization complete, waiting for shutdown
2023-02-09 14:44:08 - main - 25908 - INFO : Starting ROS Master Node
2023-02-09 14:44:08 - xmlrpc - 27172 - INFO : XML-RPC server binding to 0.0.0.0:11311
2023-02-09 14:44:08 - xmlrpc - 27172 - INFO : Started XML-RPC server [http://pf2gf7kc:11311/]
2023-02-09 14:44:08 - xmlrpc - 27172 - INFO : xml rpc node: starting XML-RPC server
2023-02-09 14:44:08 - master - 25908 - INFO : Master initialized: port[11311], uri[http://pf2gf7kc:11311/]
# topic_demo_node_1 启动日志(开始)
2023-02-09 14:45:10 - client - 19492 - INFO : init_node, name[/topic_demo_node_1_12044_1675925110198], pid[12044]
2023-02-09 14:45:10 - xmlrpc - 20232 - INFO : XML-RPC server binding to 0.0.0.0:0
2023-02-09 14:45:10 - xmlrpc - 20232 - INFO : Started XML-RPC server [http://pf2gf7kc:60976/]
2023-02-09 14:45:10 - init - 19492 - INFO : ROS Slave URI: [http://pf2gf7kc:60976/]
2023-02-09 14:45:10 - masterslave - 20232 - INFO : _ready: http://pf2gf7kc:60976/
2023-02-09 14:45:10 - registration - 26880 - INFO : Registering with master node http://127.0.0.1:11311/
2023-02-09 14:45:10 - xmlrpc - 20232 - INFO : xml rpc node: starting XML-RPC server
2023-02-09 14:45:10 - registration - 26880 - DEBUG : No topics to register with master node http://127.0.0.1:11311/
2023-02-09 14:45:10 - init - 19492 - INFO : registered with master
2023-02-09 14:45:10 - rosout - 19492 - INFO : initializing /rosout core topic
2023-02-09 14:45:10 - topics - 19492 - DEBUG : tm._add: /rosout, rosgraph_msgs/Log, pub
2023-02-09 14:45:10 - registration - 19492 - DEBUG : master.registerPublisher(/topic_demo_node_1_12044_1675925110198, /rosout, rosgraph_msgs/Log, http://pf2gf7kc:60976/)
2023-02-09 14:45:10 - master_api - 26800 - INFO : +PUB [/rosout] /topic_demo_node_1_12044_1675925110198 http://pf2gf7kc:60976/
2023-02-09 14:45:10 - rosout - 19492 - INFO : connected to core topic /rosout
2023-02-09 14:45:10 - simtime - 19492 - INFO : /use_sim_time is not set, will not subscribe to simulated time [/clock] topic
2023-02-09 14:45:10 - client - 19492 - DEBUG : init_node, name[/topic_demo_node_1_12044_1675925110198], pid[12044]
2023-02-09 14:45:10 - tcpros_base - 19492 - DEBUG : binding to 0.0.0.0 0
2023-02-09 14:45:10 - tcpros_base - 19492 - DEBUG : bound to 0.0.0.0 60978
2023-02-09 14:45:10 - tcpros_service - 19492 - DEBUG : ... service URL is rosrpc://pf2gf7kc:60978
2023-02-09 14:45:10 - tcpros_service - 19492 - DEBUG : [/topic_demo_node_1_12044_1675925110198/get_loggers]: new Service instance
2023-02-09 14:45:10 - registration - 19492 - DEBUG : master.registerService(/topic_demo_node_1_12044_1675925110198, /topic_demo_node_1_12044_1675925110198/get_loggers, rosrpc://pf2gf7kc:60978, http://pf2gf7kc:60976/)
2023-02-09 14:45:10 - master_api - 26800 - INFO : +SERVICE [/topic_demo_node_1_12044_1675925110198/get_loggers] /topic_demo_node_1_12044_1675925110198 http://pf2gf7kc:60976/
2023-02-09 14:45:10 - tcpros_service - 19492 - DEBUG : ... service URL is rosrpc://pf2gf7kc:60978
2023-02-09 14:45:10 - tcpros_service - 19492 - DEBUG : [/topic_demo_node_1_12044_1675925110198/set_logger_level]: new Service instance
2023-02-09 14:45:10 - registration - 19492 - DEBUG : master.registerService(/topic_demo_node_1_12044_1675925110198, /topic_demo_node_1_12044_1675925110198/set_logger_level, rosrpc://pf2gf7kc:60978, http://pf2gf7kc:60976/)
2023-02-09 14:45:10 - master_api - 26800 - INFO : +SERVICE [/topic_demo_node_1_12044_1675925110198/set_logger_level] /topic_demo_node_1_12044_1675925110198 http://pf2gf7kc:60976/
2023-02-09 14:45:10 - topics - 19492 - DEBUG : tm._add: /topic_demo_2, std_msgs/String, sub
2023-02-09 14:45:10 - registration - 19492 - DEBUG : master.registerSubscriber(/topic_demo_node_1_12044_1675925110198, /topic_demo_2, std_msgs/String, http://pf2gf7kc:60976/)
2023-02-09 14:45:10 - master_api - 26800 - INFO : +SUB [/topic_demo_2] /topic_demo_node_1_12044_1675925110198 http://pf2gf7kc:60976/
2023-02-09 14:45:10 - topics - 24104 - DEBUG : tm._add: /topic_demo_1, std_msgs/String, pub
2023-02-09 14:45:10 - registration - 24104 - DEBUG : master.registerPublisher(/topic_demo_node_1_12044_1675925110198, /topic_demo_1, std_msgs/String, http://pf2gf7kc:60976/)
2023-02-09 14:45:10 - client - 19492 - DEBUG : node[/topic_demo_node_1_12044_1675925110198, http://pf2gf7kc:60976/] entering spin(), pid[12044]
2023-02-09 14:45:10 - master_api - 26800 - INFO : +PUB [/topic_demo_1] /topic_demo_node_1_12044_1675925110198 http://pf2gf7kc:60976/
# topic_demo_node_2 启动日志(开始)
2023-02-09 14:46:29 - client - 20676 - INFO : init_node, name[/topic_demo_node_2_26108_1675925189526], pid[26108]
2023-02-09 14:46:29 - xmlrpc - 9668 - INFO : XML-RPC server binding to 0.0.0.0:0
2023-02-09 14:46:29 - xmlrpc - 9668 - INFO : Started XML-RPC server [http://pf2gf7kc:61018/]
2023-02-09 14:46:29 - masterslave - 9668 - INFO : _ready: http://pf2gf7kc:61018/
2023-02-09 14:46:29 - registration - 13684 - INFO : Registering with master node http://127.0.0.1:11311/
2023-02-09 14:46:29 - xmlrpc - 9668 - INFO : xml rpc node: starting XML-RPC server
2023-02-09 14:46:29 - registration - 13684 - DEBUG : No topics to register with master node http://127.0.0.1:11311/
2023-02-09 14:46:29 - init - 20676 - INFO : ROS Slave URI: [http://pf2gf7kc:61018/]
2023-02-09 14:46:29 - init - 20676 - INFO : registered with master
2023-02-09 14:46:29 - rosout - 20676 - INFO : initializing /rosout core topic
2023-02-09 14:46:29 - topics - 20676 - DEBUG : tm._add: /rosout, rosgraph_msgs/Log, pub
2023-02-09 14:46:29 - registration - 20676 - DEBUG : master.registerPublisher(/topic_demo_node_2_26108_1675925189526, /rosout, rosgraph_msgs/Log, http://pf2gf7kc:61018/)
2023-02-09 14:46:29 - master_api - 12808 - INFO : +PUB [/rosout] /topic_demo_node_2_26108_1675925189526 http://pf2gf7kc:61018/
2023-02-09 14:46:29 - rosout - 20676 - INFO : connected to core topic /rosout
2023-02-09 14:46:29 - simtime - 20676 - INFO : /use_sim_time is not set, will not subscribe to simulated time [/clock] topic
2023-02-09 14:46:29 - client - 20676 - DEBUG : init_node, name[/topic_demo_node_2_26108_1675925189526], pid[26108]
2023-02-09 14:46:29 - tcpros_base - 20676 - DEBUG : binding to 0.0.0.0 0
2023-02-09 14:46:29 - tcpros_base - 20676 - DEBUG : bound to 0.0.0.0 61020
2023-02-09 14:46:29 - tcpros_service - 20676 - DEBUG : ... service URL is rosrpc://pf2gf7kc:61020
2023-02-09 14:46:29 - tcpros_service - 20676 - DEBUG : [/topic_demo_node_2_26108_1675925189526/get_loggers]: new Service instance
2023-02-09 14:46:29 - registration - 20676 - DEBUG : master.registerService(/topic_demo_node_2_26108_1675925189526, /topic_demo_node_2_26108_1675925189526/get_loggers, rosrpc://pf2gf7kc:61020, http://pf2gf7kc:61018/)
2023-02-09 14:46:29 - master_api - 12808 - INFO : +SERVICE [/topic_demo_node_2_26108_1675925189526/get_loggers] /topic_demo_node_2_26108_1675925189526 http://pf2gf7kc:61018/
2023-02-09 14:46:29 - tcpros_service - 20676 - DEBUG : ... service URL is rosrpc://pf2gf7kc:61020
2023-02-09 14:46:29 - tcpros_service - 20676 - DEBUG : [/topic_demo_node_2_26108_1675925189526/set_logger_level]: new Service instance
2023-02-09 14:46:29 - registration - 20676 - DEBUG : master.registerService(/topic_demo_node_2_26108_1675925189526, /topic_demo_node_2_26108_1675925189526/set_logger_level, rosrpc://pf2gf7kc:61020, http://pf2gf7kc:61018/)
2023-02-09 14:46:29 - master_api - 12808 - INFO : +SERVICE [/topic_demo_node_2_26108_1675925189526/set_logger_level] /topic_demo_node_2_26108_1675925189526 http://pf2gf7kc:61018/
2023-02-09 14:46:29 - topics - 20676 - DEBUG : tm._add: /topic_demo_1, std_msgs/String, sub
2023-02-09 14:46:29 - registration - 20676 - DEBUG : master.registerSubscriber(/topic_demo_node_2_26108_1675925189526, /topic_demo_1, std_msgs/String, http://pf2gf7kc:61018/)
2023-02-09 14:46:29 - master_api - 12808 - INFO : +SUB [/topic_demo_1] /topic_demo_node_2_26108_1675925189526 http://pf2gf7kc:61018/
2023-02-09 14:46:29 - topics - 26340 - DEBUG : tm._add: /topic_demo_2, std_msgs/String, pub
2023-02-09 14:46:29 - masterslave - 26820 - DEBUG : connect[/topic_demo_1]: calling requestTopic(/topic_demo_node_2_26108_1675925189526, /topic_demo_1, [['TCPROS']])
2023-02-09 14:46:29 - registration - 26340 - DEBUG : master.registerPublisher(/topic_demo_node_2_26108_1675925189526, /topic_demo_2, std_msgs/String, http://pf2gf7kc:61018/)
2023-02-09 14:46:29 - client - 20676 - DEBUG : node[/topic_demo_node_2_26108_1675925189526, http://pf2gf7kc:61018/] entering spin(), pid[26108]
2023-02-09 14:46:29 - master_api - 12808 - INFO : +PUB [/topic_demo_2] /topic_demo_node_2_26108_1675925189526 http://pf2gf7kc:61018/
# 收发topic
2023-02-09 14:46:29 - master_api - 24928 - INFO : publisherUpdate[/topic_demo_2] -> http://pf2gf7kc:60976/ ['http://pf2gf7kc:61018/']
2023-02-09 14:46:33 - masterslave - 1644 - DEBUG : requestTopic('/topic_demo_node_2_26108_1675925189526', '/topic_demo_1', [['TCPROS']])
2023-02-09 14:46:33 - masterslave - 1644 - DEBUG : requestTopic[/topic_demo_1]: choosing protocol TCPROS
2023-02-09 14:46:33 - masterslave - 1644 - DEBUG : requestTopic('/topic_demo_node_2_26108_1675925189526', '/topic_demo_1', [['TCPROS']]) returns (1, 'ready on pf2gf7kc:60978', ['TCPROS', 'pf2gf7kc', 60978])
2023-02-09 14:46:33 - masterslave - 26820 - DEBUG : connect[/topic_demo_1]: requestTopic returned protocol list ['TCPROS', 'pf2gf7kc', 60978]
2023-02-09 14:46:33 - core - 26820 - INFO : topic[/topic_demo_1] adding connection to [http://pf2gf7kc:60976/], count 0
2023-02-09 14:46:33 - tcpros_base - 25744 - DEBUG : connecting to pf2gf7kc 60978
2023-02-09 14:46:33 - tcpros_base - 25744 - DEBUG : [/topic_demo_1]: writing header
2023-02-09 14:46:33 - tcpros_base - 23760 - DEBUG : [/topic_demo_1]: writing header
2023-02-09 14:46:33 - tcpros_base - 25744 - DEBUG : receive_loop for [/topic_demo_1]
2023-02-09 14:46:33 - core - 23760 - INFO : topic[/topic_demo_1] adding connection to [/topic_demo_node_2_26108_1675925189526], count 0
2023-02-09 14:46:33 - masterslave - 9492 - DEBUG : publisherUpdate('/master', '/topic_demo_2', ['http://pf2gf7kc:61018/'])
2023-02-09 14:46:33 - masterslave - 9492 - DEBUG : publisherUpdate('/master', '/topic_demo_2', ['http://pf2gf7kc:61018/']) returns (1, '', 0)
2023-02-09 14:46:33 - masterslave - 13884 - DEBUG : connect[/topic_demo_2]: calling requestTopic(/topic_demo_node_1_12044_1675925110198, /topic_demo_2, [['TCPROS']])
2023-02-09 14:46:33 - master_api - 24928 - INFO : publisherUpdate[/topic_demo_2] -> http://pf2gf7kc:60976/ ['http://pf2gf7kc:61018/']: sec=4.07, result=[1, '', 0]
2023-02-09 14:46:34 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:35 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:36 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:37 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:37 - masterslave - 27052 - DEBUG : requestTopic('/topic_demo_node_1_12044_1675925110198', '/topic_demo_2', [['TCPROS']])
2023-02-09 14:46:37 - masterslave - 27052 - DEBUG : requestTopic[/topic_demo_2]: choosing protocol TCPROS
2023-02-09 14:46:37 - masterslave - 27052 - DEBUG : requestTopic('/topic_demo_node_1_12044_1675925110198', '/topic_demo_2', [['TCPROS']]) returns (1, 'ready on pf2gf7kc:61020', ['TCPROS', 'pf2gf7kc', 61020])
2023-02-09 14:46:37 - masterslave - 13884 - DEBUG : connect[/topic_demo_2]: requestTopic returned protocol list ['TCPROS', 'pf2gf7kc', 61020]
2023-02-09 14:46:37 - core - 13884 - INFO : topic[/topic_demo_2] adding connection to [http://pf2gf7kc:61018/], count 0
2023-02-09 14:46:37 - tcpros_base - 10828 - DEBUG : connecting to pf2gf7kc 61020
2023-02-09 14:46:37 - tcpros_base - 10828 - DEBUG : [/topic_demo_2]: writing header
2023-02-09 14:46:37 - tcpros_base - 23504 - DEBUG : [/topic_demo_2]: writing header
2023-02-09 14:46:37 - tcpros_base - 10828 - DEBUG : receive_loop for [/topic_demo_2]
2023-02-09 14:46:37 - core - 23504 - INFO : topic[/topic_demo_2] adding connection to [/topic_demo_node_1_12044_1675925110198], count 0
2023-02-09 14:46:38 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:38 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:39 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:39 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:40 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:40 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:41 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:41 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:42 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:42 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:43 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:43 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:44 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:44 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:45 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:45 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:46 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:46 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:47 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:47 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:48 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:48 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:49 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:49 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:50 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:50 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:51 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:51 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:52 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:52 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:53 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:53 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:54 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:54 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:55 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:55 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:56 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:56 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:57 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:57 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:58 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:58 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:46:59 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:46:59 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:47:00 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:47:00 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:47:01 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:47:01 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:47:02 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:47:02 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:47:03 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:47:03 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:47:04 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:47:04 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:47:05 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:47:05 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:47:06 - listener - 25744 - INFO : data: "topic_demo_1"
2023-02-09 14:47:06 - talker - 10828 - INFO : data: "topic_demo_2"
2023-02-09 14:47:07 - listener - 25744 - INFO : data: "topic_demo_1"
# 订阅段关闭
2023-02-09 14:47:07 - core - 10828 - ERROR : Traceback (most recent call last):
File "D:\Program\py_env\demo\lib\site-packages\rospy\impl\tcpros_base.py", line 737, in receive_once
self.stat_bytes += recv_buff(sock, b, p.buff_size)
File "D:\Program\py_env\demo\lib\site-packages\rospy\impl\tcpros_base.py", line 104, in recv_buff
d = sock.recv(buff_size)
ConnectionResetError: [WinError 10054] 远程主机强迫关闭了一个现有的连接。
2023-02-09 14:47:07 - xmlrpc - 12808 - ERROR : Traceback (most recent call last):
File "D:\Program\Python39\lib\socketserver.py", line 683, in process_request_thread
self.finish_request(request, client_address)
File "D:\Program\Python39\lib\socketserver.py", line 360, in finish_request
self.RequestHandlerClass(request, client_address, self)
File "D:\Program\Python39\lib\socketserver.py", line 747, in __init__
self.handle()
File "D:\Program\Python39\lib\http\server.py", line 429, in handle
self.handle_one_request()
File "D:\Program\Python39\lib\http\server.py", line 395, in handle_one_request
self.raw_requestline = self.rfile.readline(65537)
File "D:\Program\Python39\lib\socket.py", line 704, in readinto
return self._sock.recv_into(b)
ConnectionResetError: [WinError 10054] 远程主机强迫关闭了一个现有的连接。
2023-02-09 14:47:07 - tcpros_base - 10828 - DEBUG : connecting to pf2gf7kc 61020
2023-02-09 14:47:09 - topics - 24104 - DEBUG : publisher connection to [/topic_demo_node_2_26108_1675925189526] terminated, see errorlog for details:
Traceback (most recent call last):
File "D:\Program\py_env\demo\lib\site-packages\rospy\impl\tcpros_base.py", line 689, in write_data
self.socket.sendall(data)
ConnectionResetError: [WinError 10054] 远程主机强迫关闭了一个现有的连接。
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "D:\Program\py_env\demo\lib\site-packages\rospy\topics.py", line 1075, in publish
c.write_data(data)
File "D:\Program\py_env\demo\lib\site-packages\rospy\impl\tcpros_pubsub.py", line 413, in write_data
raise error
File "D:\Program\py_env\demo\lib\site-packages\rospy\impl\tcpros_pubsub.py", line 437, in _run
self._connection.write_data(data)
File "D:\Program\py_env\demo\lib\site-packages\rospy\impl\tcpros_base.py", line 694, in write_data
(ioe_errno, msg) = ioe.args
ValueError: too many values to unpack (expected 2)
2023-02-09 14:47:09 - core - 24104 - INFO : topic[/topic_demo_1] removing connection to /topic_demo_node_2_26108_1675925189526
2023-02-09 14:47:09 - core - 10828 - WARNING : Unknown error initiating TCP/IP socket to pf2gf7kc:61020 (http://pf2gf7kc:61018/): Traceback (most recent call last):
File "D:\Program\py_env\demo\lib\site-packages\rospy\impl\tcpros_base.py", line 560, in connect
self.socket.connect((dest_addr, dest_port))
ConnectionRefusedError: [WinError 10061] 由于目标计算机积极拒绝,无法连接。
2023-02-09 14:47:09 - core - 10828 - INFO : topic[/topic_demo_2] removing connection to http://pf2gf7kc:61018/
2023-02-09 14:47:10 - core - 10828 - DEBUG : receive_loop[/topic_demo_2]: done condition met, exited loop
2023-02-09 14:47:21 - xmlrpc - 26800 - ERROR : Traceback (most recent call last):
File "D:\Program\Python39\lib\socketserver.py", line 683, in process_request_thread
self.finish_request(request, client_address)
File "D:\Program\Python39\lib\socketserver.py", line 360, in finish_request
self.RequestHandlerClass(request, client_address, self)
File "D:\Program\Python39\lib\socketserver.py", line 747, in __init__
self.handle()
File "D:\Program\Python39\lib\http\server.py", line 429, in handle
self.handle_one_request()
File "D:\Program\Python39\lib\http\server.py", line 395, in handle_one_request
self.raw_requestline = self.rfile.readline(65537)
File "D:\Program\Python39\lib\socket.py", line 704, in readinto
return self._sock.recv_into(b)
ConnectionResetError: [WinError 10054] 远程主机强迫关闭了一个现有的连接。