datetime:2023-04-25 10:46:00
author:nzb
py-spy
安装
pip install py-spy
参数
record:将堆栈跟踪信息记录到火焰图、速度范围或原始文件中top:可以展示哪些函数被调用执行的次数最多(显示消耗CPU最多的函数)dump:将目标程序的堆栈跟踪转储到stdout
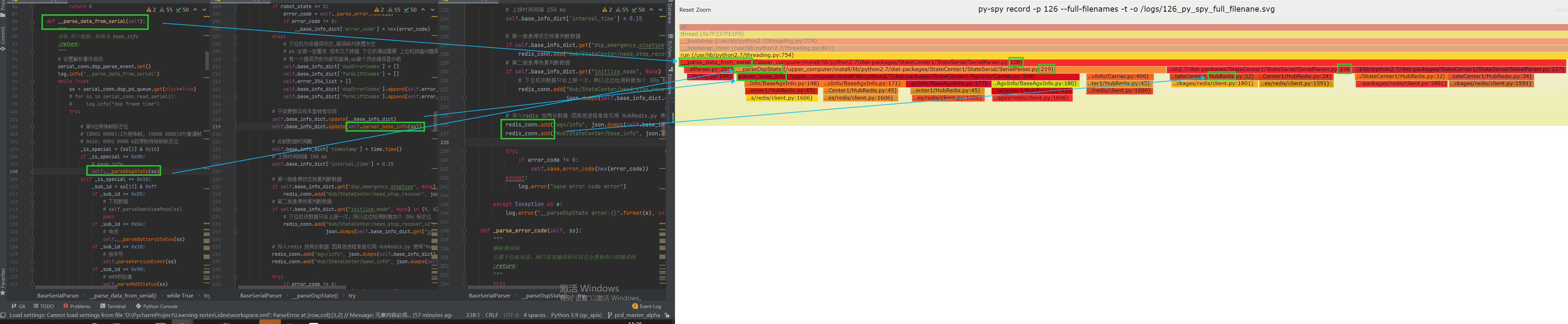
record
- 命令:
py-spy record 参数
-p, --pid <pid>:指定进程(线程)PID--full-filenames:显示文件全名(包括路径)-o, --output <filename>:输出文件-f, --format <format>:输出文件的格式[默认: flamegraph] [其他选项: flamegraph, raw, speedscope]-d, --duration <duration>:采样的秒数 [默认: 无限制]-r, --rate <rate>:要采样的秒数每秒要采集的样本数 [默认: 100]-s, --subprocesses:配置原始流程的子流程-F, --function:按函数的第一个行号而不是当前行号聚合样本--nolineno:不显示行号-t, --threads:在输出中显示线程ID-g, --gil:仅包括保留在GIL上的跟踪-i, --idle:包括空闲线程的堆栈跟踪--nonblocking:收集样本时不要暂停python进程。设置此选项将减少采样对性能的影响,但可能导致不准确的结果
示例
top
- 命令:
py-spy top - 参数
-p, --pid <pid>:指定进程(线程)PID-r, --rate <rate>:要采样的秒数每秒要采集的样本数 [默认: 100]-s, --subprocesses:配置原始流程的子流程--full-filenames:显示文件全名(包括路径)-g, --gil:仅包括保留在GIL上的跟踪-i, --idle:包括空闲线程的堆栈跟踪--nonblocking:收集样本时不要暂停python进程。设置此选项将减少采样对性能的影响,但可能导致不准确的结果
Collecting samples from 'python /upper_computer/upper_main/upper_computer_ros/script/ros_center/RosCenter_zmq.py' (python v2.7.17)
Total Samples 5183
GIL: 22.00%, Active: 2600.00%, Threads: 28
%Own %Total OwnTime TotalTime Function (filename:line)
1477.00% 1477.00% 766.3s 766.3s recv_buff (rospy/impl/tcpros_base.py:104)
200.00% 200.00% 103.7s 103.7s __clear (script/ros_center/LogUtil.py:66)
200.00% 200.00% 103.7s 103.7s _eintr_retry (SocketServer.py:150)
100.00% 100.00% 51.83s 51.83s compress_slam_map (script/ros_center/RosCenter_zmq.py:439)
100.00% 100.00% 51.83s 51.83s recv_string (zmq/sugar/socket.py:592)
100.00% 100.00% 51.83s 51.83s compress_slam_landmark (script/ros_center/RosCenter_zmq.py:376)
100.00% 100.00% 51.83s 51.83s accept (socket.py:206)
100.00% 100.00% 51.83s 51.83s wallsleep (rospy/rostime.py:277)
100.00% 100.00% 51.83s 51.83s print_self_dict (script/ros_center/RosCenter_zmq.py:203)
99.00% 99.00% 51.53s 51.53s run (gevent/hub.py:639)
5.00% 5.00% 2.06s 2.06s iterencode (json/encoder.py:270)
1.00% 1.00% 1.67s 1.91s deserialize (sensor_msgs/msg/_PointCloud.py:194)
3.00% 6.00% 1.08s 1.78s deserialize (sensor_msgs/msg/_PointCloud.py:190)
2.00% 2.00% 0.730s 0.730s meth (socket.py:228)
0.00% 1488.00% 0.410s 772.4s receive_loop (rospy/impl/tcpros_base.py:797)
2.00% 2.00% 0.370s 0.370s deserialize (sensor_msgs/msg/_PointCloud.py:195)
0.00% 0.00% 0.300s 0.300s encode (json/encoder.py:210)
0.00% 0.00% 0.260s 0.260s send (zmq/sugar/socket.py:400)
0.00% 0.00% 0.250s 0.250s _retryable_call (redis/_compat.py:53)
Press Control-C to quit, or ? for help.
- 说明
- %Own(当前在该函数中花费的时间的百分比)
- %Total(函数及其子级中当前的时间百分比)
- OwnTime(函数中花费的总时间) — TotalTime(该函数及其子项花费的总时间)
dump
- 命令:
py-spy dump 参数
-p, --pid <pid>:指定进程(线程)PID-s, --subprocesses:配置原始流程的子流程--nonblocking:收集样本时不要暂停python进程。设置此选项将减少采样对性能的影响,但可能导致不准确的结果--full-filenames:显示文件全名(包括路径)-l, --locals:显示每个帧的局部变量。多次传递(-ll)会增加冗长程度-j, --json:JSON格式化输出 Format output as JSON
说明
- Arguments:函数运行参数
- Locals:局部变量
Process 149: python /upper_computer/upper_main/upper_computer_ros/script/ros_center/RosCenter_zmq.py
Python v2.7.17 (/usr/bin/python2.7)
Thread 0x7F8F028BD0 (active)
wallsleep (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/rostime.py:277)
Arguments:
duration: 0.5
spin (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/client.py:129)
<module> (/upper_computer/upper_main/upper_computer_ros/script/ros_center/RosCenter_zmq.py:92)
Thread 0x7F8D9171F0 (active)
__clear (/upper_computer/upper_main/upper_computer_ros/script/ros_center/LogUtil.py:66)
Arguments:
self: <SaveLog at 0x7f8d925490>
Locals:
file_list: ["/logs/ros_log/ros_2023-05-09_11_34_05", "/logs/ros_log/ros_2023-05-09_01_01_36", ...]
file_: "/logs/ros_log/ros_obstacles_timeout_2023-05-08_18_49_03"
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8d925690>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8d925690>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8d925690>
Thread 0x7F8D1161F0 (active)
__clear (/upper_computer/upper_main/upper_computer_ros/script/ros_center/LogUtil.py:66)
Arguments:
self: <SaveLog at 0x7f8d925950>
Locals:
file_list: ["/logs/ros_log/ros_obstacles_timeout_2023-05-08_18_49_03"]
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8d925a50>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8d925a50>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8d925a50>
Thread 0x7F87FFF1F0 (active)
_eintr_retry (/usr/lib/python2.7/SocketServer.py:150)
Arguments:
func: <builtin_function_or_method at 0x7f8df87dc0>
Locals:
args: ([<instance at 0x7f8c83e4b0>], [], [], 0.5)
serve_forever (/usr/lib/python2.7/SocketServer.py:231)
Arguments:
self: <instance at 0x7f8c83e4b0>
poll_interval: 0.5
Locals:
r: []
w: []
e: []
_run (/opt/ros/melodic/lib/python2.7/dist-packages/rosgraph/xmlrpc.py:297)
Arguments:
self: <XmlRpcNode at 0x7f8c839ed0>
run (/opt/ros/melodic/lib/python2.7/dist-packages/rosgraph/xmlrpc.py:225)
Arguments:
self: <XmlRpcNode at 0x7f8c839ed0>
Thread 0x7F877FE1F0 (idle)
wait (/usr/lib/python2.7/threading.py:359)
Arguments:
self: <_Condition at 0x7f8c8392d0>
timeout: 0.5
Locals:
waiter: <thread.lock at 0x7f8c7f55f0>
saved_state: (1, 547734151664)
endtime: 1683613820.420009
delay: 0.05
gotit: False
remaining: 0.33446288108825684
run (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/registration.py:298)
Arguments:
self: <RegManager at 0x7f8c829dd0>
Locals:
cond: <_Condition at 0x7f8c8392d0>
topic: None
uris: None
x: ("/error_msg", ["http://192.168.111.111:43381/", "http://192.168.111.111:41241/", "http://192.168.111.111:37035/", ...])
uri: "http://192.168.111.111:33045/"
t: <Thread at 0x7f8c8391d0>
start (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/registration.py:276)
Arguments:
self: <RegManager at 0x7f8c829dd0>
uri: "http://192.168.111.111:44309/"
master_uri: "http://192.168.111.111:11311"
Locals:
first: True
tm: <_TopicManager at 0x7f8dba7b90>
sm: <ServiceManager at 0x7f8dbea150>
ns: "/"
caller_id: "/UpperComputerRosCenter"
registered: True
master: <instance at 0x7f8c84c4b0>
pub: []
sub: []
srv: []
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c854390>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c854390>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c854390>
Thread 0x7F86FFD1F0 (active)
accept (/usr/lib/python2.7/socket.py:206)
Arguments:
self: <_socketobject at 0x7f8c844c20>
run (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:154)
Arguments:
self: <TCPServer at 0x7f8c854650>
Locals:
client_sock: <_socketobject at 0x7f8c7fe750>
client_addr: ("192.168.111.111", 52982)
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c854990>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c854990>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c854990>
Thread 0x7F84FF91F0 (active)
_eintr_retry (/usr/lib/python2.7/SocketServer.py:150)
Arguments:
func: <builtin_function_or_method at 0x7f8df87dc0>
Locals:
args: ([<instance at 0x7f8c7f65f0>], [], [], 0.5)
serve_forever (/usr/lib/python2.7/SocketServer.py:231)
Arguments:
self: <instance at 0x7f8c7f65f0>
poll_interval: 0.5
Locals:
r: []
w: []
e: []
__init_xmlrpc_server (/upper_computer/upper_main/upper_computer_ros/script/ros_center/RosCenter_zmq.py:90)
Arguments:
self: <RpcRosService at 0x7f8c7f4290>
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7f42d0>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7f42d0>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7f42d0>
Thread 0x7F527FC1F0 (active)
run (/usr/local/lib/python2.7/dist-packages/gevent/hub.py:639)
Arguments:
self: <Hub at 0x7f8c845470>
Locals:
loop: <gevent.libev.corecext.loop at 0x7f8c8b8c80>
Thread 0x7F50FF91F0 (active)
recv_string (/usr/local/lib/python2.7/dist-packages/zmq/sugar/socket.py:592)
Arguments:
self: <Socket at 0x7f8c7fe0c0>
flags: 0
encoding: "utf-8"
__init_topic_zmq_response (/upper_computer/upper_main/upper_computer_ros/script/ros_center/RosCenter_zmq.py:294)
Arguments:
self: <RosCenter at 0x7f8c854b10>
Locals:
resp_context: <Context at 0x7f8c7fd230>
resp_socket: <Socket at 0x7f8c7fe0c0>
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7f47d0>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7f47d0>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7f47d0>
Thread 0x7F42FFD1F0 (active)
print_self_dict (/upper_computer/upper_main/upper_computer_ros/script/ros_center/RosCenter_zmq.py:203)
Arguments:
self: <RosCenter at 0x7f8c854b10>
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7f4a50>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7f4a50>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7f4a50>
Thread 0x7F1E7FC1F0 (active)
compress_slam_landmark (/upper_computer/upper_main/upper_computer_ros/script/ros_center/RosCenter_zmq.py:376)
Arguments:
self: <RosCenter at 0x7f8c854b10>
Locals:
slam_mode: 1
landmark_data: dict
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c854dd0>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c854dd0>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c854dd0>
Thread 0x7F07FFF1F0 (active)
compress_slam_map (/upper_computer/upper_main/upper_computer_ros/script/ros_center/RosCenter_zmq.py:439)
Arguments:
self: <RosCenter at 0x7f8c854b10>
Locals:
has_compress_slam_map: True
slam_mode: 1
data: dict
data2: dict
sleep_time: 10
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7a1fd0>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7a1fd0>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7a1fd0>
Thread 0x7F077FE1F0 (idle)
wait (/usr/lib/python2.7/threading.py:340)
Arguments:
self: <_Condition at 0x7f8c7b7190>
timeout: None
Locals:
waiter: <thread.lock at 0x7f8c7f5950>
saved_state: None
_run (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:429)
Arguments:
self: <QueuedConnection at 0x7f8c7b7150>
Locals:
queue: []
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7b7090>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7b7090>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7b7090>
Thread 0x7F057FA1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7fe600>
b: <cStringIO.StringO at 0x7f8c7a1530>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c7a1650>
Locals:
sock: <_socketobject at 0x7f8c7fe600>
b: <cStringIO.StringO at 0x7f8c7a1530>
msg_queue: []
p: <TCPROSSub at 0x7f8c7a1590>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c7a1650>
msgs_callback: <instancemethod at 0x7f8c7a2be0>
Locals:
msgs: [<sensor_states at 0x7f8c7b76d0>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c7a1650>
dest_addr: "192.168.111.111"
dest_port: 40779
pub_uri: "http://192.168.111.111:33045/"
receive_cb: <instancemethod at 0x7f8c7a2be0>
resolved_topic_name: "/obstacle_detection_all_sensors/sensor_states"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7a14d0>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7a14d0>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7a14d0>
Thread 0x7F1D7FA1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7fe1a0>
b: <cStringIO.StringO at 0x7f8c807930>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c807910>
Locals:
sock: <_socketobject at 0x7f8c7fe1a0>
b: <cStringIO.StringO at 0x7f8c807930>
msg_queue: []
p: <TCPROSSub at 0x7f8c854e50>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c807910>
msgs_callback: <instancemethod at 0x7f8c8025f0>
Locals:
msgs: [<PoseStampedWithConfidenceAndResetLocation at 0x7f8c783550>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c807910>
dest_addr: "192.168.111.111"
dest_port: 46071
pub_uri: "http://192.168.111.111:43381/"
receive_cb: <instancemethod at 0x7f8c8025f0>
resolved_topic_name: "/cur_pose"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c807890>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c807890>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c807890>
Thread 0x7F427FC1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7fe8a0>
b: <cStringIO.StringO at 0x7f8c7ac3f0>
buff_size: 1
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c7ac290>
Locals:
sock: <_socketobject at 0x7f8c7fe8a0>
b: <cStringIO.StringO at 0x7f8c7ac3f0>
msg_queue: []
p: <TCPROSSub at 0x7f8c854ed0>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c7ac290>
msgs_callback: <instancemethod at 0x7f8c7bf0f0>
Locals:
msgs: [<OccupancyGrid at 0x7f8c7a28c0>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c7ac290>
dest_addr: "192.168.111.111"
dest_port: 36627
pub_uri: "http://192.168.111.111:36281/"
receive_cb: <instancemethod at 0x7f8c7bf0f0>
resolved_topic_name: "/map"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7ac450>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7ac450>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7ac450>
Thread 0x7F06FFD1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7fe4b0>
b: <cStringIO.StringO at 0x7f8c813ef0>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c8135d0>
Locals:
sock: <_socketobject at 0x7f8c7fe4b0>
b: <cStringIO.StringO at 0x7f8c813ef0>
msg_queue: []
p: <TCPROSSub at 0x7f8c813fd0>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c8135d0>
msgs_callback: <instancemethod at 0x7f8c79c730>
Locals:
msgs: [<Int32 at 0x7f8c854b90>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c8135d0>
dest_addr: "192.168.111.111"
dest_port: 39983
pub_uri: "http://192.168.111.111:37035/"
receive_cb: <instancemethod at 0x7f8c79c730>
resolved_topic_name: "/cold_start_status"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7ac590>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7ac590>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7ac590>
Thread 0x7F1F7FE1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7fe9f0>
b: <cStringIO.StringO at 0x7f8c854bf0>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c854c90>
Locals:
sock: <_socketobject at 0x7f8c7fe9f0>
b: <cStringIO.StringO at 0x7f8c854bf0>
msg_queue: []
p: <TCPROSSub at 0x7f8c854d10>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c854c90>
msgs_callback: <instancemethod at 0x7f8c79c640>
Locals:
msgs: [<ErrorMsg at 0x7f8c769c90>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c854c90>
dest_addr: "192.168.111.111"
dest_port: 39983
pub_uri: "http://192.168.111.111:37035/"
receive_cb: <instancemethod at 0x7f8c79c640>
resolved_topic_name: "/error_msg"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c854b50>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c854b50>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c854b50>
Thread 0x7F1CFF91F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7feb40>
b: <cStringIO.StringO at 0x7f8c7acb70>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c7acb10>
Locals:
sock: <_socketobject at 0x7f8c7feb40>
b: <cStringIO.StringO at 0x7f8c7acb70>
msg_queue: []
p: <TCPROSSub at 0x7f8c813bd0>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c7acb10>
msgs_callback: <instancemethod at 0x7f8c7a2dc0>
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c7acb10>
dest_addr: "192.168.111.111"
dest_port: 46071
pub_uri: "http://192.168.111.111:43381/"
receive_cb: <instancemethod at 0x7f8c7a2dc0>
resolved_topic_name: "/error_msg"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7aca90>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7aca90>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7aca90>
Thread 0x7F1EFFD1F0 (active+gil)
can_read (/usr/local/lib/python2.7/dist-packages/redis/connection.py:229)
Arguments:
self: <SocketBuffer at 0x7f8d99fed0>
timeout: 0
can_read (/usr/local/lib/python2.7/dist-packages/redis/connection.py:321)
Arguments:
self: <PythonParser at 0x7f8d99fe90>
timeout: 0
can_read (/usr/local/lib/python2.7/dist-packages/redis/connection.py:734)
Arguments:
self: <Connection at 0x7f8d9e65d0>
timeout: 0
Locals:
sock: <_socketobject at 0x7f8d9fdad0>
get_connection (/usr/local/lib/python2.7/dist-packages/redis/connection.py:1198)
Arguments:
self: <ConnectionPool at 0x7f8d9d9a50>
command_name: ?
Locals:
keys: ()
options: dict
connection: <Connection at 0x7f8d9e65d0>
execute_command (/usr/local/lib/python2.7/dist-packages/redis/client.py:898)
Arguments:
self: <Redis at 0x7f8da09350>
Locals:
args: ?
options: dict
pool: <ConnectionPool at 0x7f8d9d9a50>
command_name: ?
set (/usr/local/lib/python2.7/dist-packages/redis/client.py:1801)
Arguments:
self: <Redis at 0x7f8da09350>
name: "slam/scan"
value: ?
ex: None
px: None
nx: False
xx: False
keepttl: False
Locals:
pieces: ?
set (/upper_computer/upper_main/upper_computer_ros/script/ros_center/RedisConn.py:40)
Arguments:
self: <QsHubRedis at 0x7f8da01c10>
key: "slam/scan"
value: ?
timeout: 3
slam_scan_data_callback (/upper_computer/upper_main/upper_computer_ros/script/ros_center/RosCenter_zmq.py:592)
Arguments:
self: <RosCenter at 0x7f8c854b10>
msg: <PointCloud at 0x7f8c7bf5f0>
_invoke_callback (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/topics.py:750)
Arguments:
self: <_SubscriberImpl at 0x7f8c807090>
msg: <PointCloud at 0x7f8c7bf5f0>
cb: <instancemethod at 0x7f8c802280>
cb_args: None
receive_callback (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/topics.py:769)
Arguments:
self: <_SubscriberImpl at 0x7f8c807090>
msgs: [<PointCloud at 0x7f8c7bf5f0>]
connection: <TCPROSTransport at 0x7f8c807dd0>
Locals:
callbacks: [(<instancemethod at 0x7f8c802280>, None)]
msg: <PointCloud at 0x7f8c7bf5f0>
cb: <instancemethod at 0x7f8c802280>
cb_args: None
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:799)
Arguments:
self: <TCPROSTransport at 0x7f8c807dd0>
msgs_callback: <instancemethod at 0x7f8c80ef50>
Locals:
msgs: [<PointCloud at 0x7f8c7bf5f0>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c807dd0>
dest_addr: "192.168.111.111"
dest_port: 37155
pub_uri: "http://192.168.111.111:41241/"
receive_cb: <instancemethod at 0x7f8c80ef50>
resolved_topic_name: "/scan_matched_points2"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c807ad0>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c807ad0>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c807ad0>
Thread 0x7F41FFB1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7fed00>
b: <cStringIO.StringO at 0x7f8c807cf0>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c807a90>
Locals:
sock: <_socketobject at 0x7f8c7fed00>
b: <cStringIO.StringO at 0x7f8c807cf0>
msg_queue: []
p: <TCPROSSub at 0x7f8c7acad0>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c807a90>
msgs_callback: <instancemethod at 0x7f8c7aa190>
Locals:
msgs: [<ErrorMsg at 0x7f8c769980>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c807a90>
dest_addr: "192.168.111.111"
dest_port: 37155
pub_uri: "http://192.168.111.111:41241/"
receive_cb: <instancemethod at 0x7f8c7aa190>
resolved_topic_name: "/error_msg"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7a1f90>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7a1f90>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7a1f90>
Thread 0x7F1DFFB1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7fede0>
b: <cStringIO.StringO at 0x7f8c7a19b0>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c7a1d10>
Locals:
sock: <_socketobject at 0x7f8c7fede0>
b: <cStringIO.StringO at 0x7f8c7a19b0>
msg_queue: []
p: <TCPROSSub at 0x7f8c7accd0>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c7a1d10>
msgs_callback: <instancemethod at 0x7f8c7bf9b0>
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c7a1d10>
dest_addr: "192.168.111.111"
dest_port: 46071
pub_uri: "http://192.168.111.111:43381/"
receive_cb: <instancemethod at 0x7f8c7bf9b0>
resolved_topic_name: "/robot_mode"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7a1ed0>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7a1ed0>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7a1ed0>
Thread 0x7F067FC1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7fefa0>
b: <cStringIO.StringO at 0x7f8c7accf0>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c7acf50>
Locals:
sock: <_socketobject at 0x7f8c7fefa0>
b: <cStringIO.StringO at 0x7f8c7accf0>
msg_queue: []
p: <TCPROSSub at 0x7f8c7ac790>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c7acf50>
msgs_callback: <instancemethod at 0x7f8c7bf960>
Locals:
msgs: [<Int32 at 0x7f8c7b7950>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c7acf50>
dest_addr: "192.168.111.111"
dest_port: 37155
pub_uri: "http://192.168.111.111:41241/"
receive_cb: <instancemethod at 0x7f8c7bf960>
resolved_topic_name: "/robot_mode"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7b7b90>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7b7b90>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7b7b90>
Thread 0x7F1FFFF1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7feec0>
b: <cStringIO.StringO at 0x7f8c7b7370>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c7b7b10>
Locals:
sock: <_socketobject at 0x7f8c7feec0>
b: <cStringIO.StringO at 0x7f8c7b7370>
msg_queue: []
p: <TCPROSSub at 0x7f8c7b7a90>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c7b7b10>
msgs_callback: <instancemethod at 0x7f8c7aafa0>
Locals:
msgs: [<PointCloud at 0x7f8c7aa4b0>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c7b7b10>
dest_addr: "192.168.111.111"
dest_port: 37155
pub_uri: "http://192.168.111.111:41241/"
receive_cb: <instancemethod at 0x7f8c7aafa0>
resolved_topic_name: "/map_cloud"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c7b7510>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c7b7510>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c7b7510>
Thread 0x7EE3FFF1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c7693d0>
b: <cStringIO.StringO at 0x7f8c76a9b0>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c76af10>
Locals:
sock: <_socketobject at 0x7f8c7693d0>
b: <cStringIO.StringO at 0x7f8c76a9b0>
msg_queue: []
p: <TCPROSSub at 0x7f8c76ac50>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c76af10>
msgs_callback: <instancemethod at 0x7f8c79cd20>
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c76af10>
dest_addr: "192.168.111.111"
dest_port: 40779
pub_uri: "http://192.168.111.111:33045/"
receive_cb: <instancemethod at 0x7f8c79cd20>
resolved_topic_name: "/error_msg"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c76ab10>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c76ab10>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c76ab10>
Thread 0x7EE37FE1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c769520>
b: <cStringIO.StringO at 0x7f8c76aa30>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c76af50>
Locals:
sock: <_socketobject at 0x7f8c769520>
b: <cStringIO.StringO at 0x7f8c76aa30>
msg_queue: []
p: <TCPROSSub at 0x7f8c76ae50>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c76af50>
msgs_callback: <instancemethod at 0x7f8c812320>
Locals:
msgs: [<barrier_result at 0x7f8c847ad0>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c76af50>
dest_addr: "192.168.111.111"
dest_port: 40779
pub_uri: "http://192.168.111.111:33045/"
receive_cb: <instancemethod at 0x7f8c812320>
resolved_topic_name: "/new_obstacles"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c76aad0>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c76aad0>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c76aad0>
Thread 0x7F867FC1F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c769210>
b: <cStringIO.StringO at 0x7f8c8137b0>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c813b10>
Locals:
sock: <_socketobject at 0x7f8c769210>
b: <cStringIO.StringO at 0x7f8c8137b0>
msg_queue: []
p: <TCPROSSub at 0x7f8c813a50>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c813b10>
msgs_callback: <instancemethod at 0x7f8c812eb0>
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c813b10>
dest_addr: "192.168.111.111"
dest_port: 33389
pub_uri: "http://192.168.111.111:36401/"
receive_cb: <instancemethod at 0x7f8c812eb0>
resolved_topic_name: "/barcode"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c813690>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c813690>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c813690>
Thread 0x7F40FF91F0 (active)
recv_buff (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:104)
Arguments:
sock: <_socketobject at 0x7f8c769280>
b: <cStringIO.StringO at 0x7f8c813330>
buff_size: 65536
receive_once (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:737)
Arguments:
self: <TCPROSTransport at 0x7f8c813650>
Locals:
sock: <_socketobject at 0x7f8c769280>
b: <cStringIO.StringO at 0x7f8c813330>
msg_queue: []
p: <TCPROSSub at 0x7f8c813590>
receive_loop (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py:797)
Arguments:
self: <TCPROSTransport at 0x7f8c813650>
msgs_callback: <instancemethod at 0x7f8c812910>
Locals:
msgs: [<Odometry at 0x7f8c7fdbf0>]
robust_connect_subscriber (/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros_pubsub.py:185)
Arguments:
conn: <TCPROSTransport at 0x7f8c813650>
dest_addr: "192.168.111.111"
dest_port: 41197
pub_uri: "http://192.168.111.111:35359/"
receive_cb: <instancemethod at 0x7f8c812910>
resolved_topic_name: "/dsp_pos"
Locals:
interval: 0.5
run (/usr/lib/python2.7/threading.py:754)
Arguments:
self: <Thread at 0x7f8c813610>
__bootstrap_inner (/usr/lib/python2.7/threading.py:801)
Arguments:
self: <Thread at 0x7f8c813610>
__bootstrap (/usr/lib/python2.7/threading.py:774)
Arguments:
self: <Thread at 0x7f8c813610>