datetime:2023/09/21 10:19
author:nzb
该项目来源于大佬的动手学ROS2
5.时光记录仪之rosbag2
本节我们来介绍ROS2中常用的一个CLI工具——rosbag2,这个工具用于记录话题的数据(就像录视频一样)。
我们就可以使用这个指令将话题数据存储为文件 ,后续我们无需启动节点,直接可以将bag文件里的话题数据发布出来。
这个工具在我们做一个真实机器人的时候非常有用,比如我们可以录制一段机器人发生问题的话题数据,录制完成后可以多次发布出来进行测试和实验,也可以将话题数据分享给别人用于验证算法等。
我们尝试使用bag工具来记录话题数据,并二次重放。
一、安装
当我们安装ROS2的时候,这个命令行工具已经为我们自动安装了,这里我们就不需要再次安装。
二、记录
2.1 常用指令
启动talker
ros2 run demo_nodes_cpp talker
2.1.1 记录
/topic-name 为话题名字
ros2 bag record /topic-name
2.1.2 记录多个话题的数据
ros2 bag record topic-name1 topic-name2
2.1.3 记录所有话题
ros2 bag record -a
2.1.4其他选项
-o name 自定义输出文件的名字
ros2 bag record -o file-name topic-name
-s 存储格式
目前仅支持sqllite3,其他还带拓展,后续更新再更新。
2.2 录制chatter
2.2.1 启动talker
运行talker节点
ros2 run demo_nodes_cpp talker
2.2.2 录制
接着使用像下面的指令就可以进行话题数据的录制了
ros2 bag record /chatter
如何停止录制呢?我们直接在终端中使用Ctrl+C指令打断录制即可
接着你会在终端中发现多处一个文件夹,名字叫做rosbag2_xxxxxx.db3
打开文件夹,可以看到内容

这样我们就完成了录制。
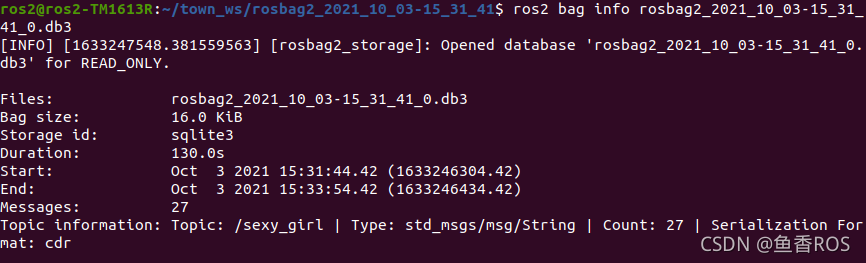
三、查看录制出话题的信息
我们在播放一个视频前,可以通过文件信息查看视频的相关信息,比如话题记录的时间,大小,类型,数量
ros2 bag info bag-file
四、播放
4.1 播放话题数据
接着我们就可以重新的播放数据,使用下面的指令可以播放数据
ros2 bag play xxx.db3
使用ros2的topic的指令来查看数据
ros2 topic echo /chatter
4.2 播放选项
4.2.1 倍速播放 -r
-r选项可以修改播放速率,比如 -r 值,比如 -r 10,就是10倍速,十倍速播放话题
ros2 bag play rosbag2_2021_10_03-15_31_41_0.db3 -r 10
4.2.2 -l 循环播放
单曲循环就是它了
ros2 bag play rosbag2_2021_10_03-15_31_41_0.db3 -l
4.2.3 播放单个话题
ros2 bag play rosbag2_2021_10_03-15_31_41_0.db3 --topics /chatter
五、总结
相信你已经掌握了ROS2的bag工具~