datetime:2023/10/26 10:23
author:nzb
该项目来源于大佬的动手学ROS2
3.控制舵机学会使用执行器
本节我们尝试使用第三方库来驱动舵机,实现让舵机指针指向任意角度。
一、新建工程
新建example19_servo
在platformio.ini中添加舵机库
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
lib_deps =
madhephaestus/ESP32Servo@^0.12.0
二、编写代码
带注释代码如下。
#include <Arduino.h>
#include <ESP32Servo.h>
Servo servo1; // 创建对象
void setup()
{
servo1.setPeriodHertz(50); // 舵机控制周期为50hz,即一个周期1000/50=20ms
servo1.attach(4, 500, 2500); // 使用GPIO4作为舵机1信号引脚,占空比为500-2500us即 0.5-2.5ms
servo1.write(90.0); // 设置90度
}
void loop()
{
for (int i = 0; i < int(180); i++)
{
servo1.write(i); // 设置角度
delay(5);
}
}
三、代码注解
这里主要需要介绍的是关于舵机的控制周期及占空比是如何设置的,这里设计到了PWM相关的知识。
PWM即脉宽调制(Pulse-width Modulation, PWM),之前在I2C介绍章节中,曾介绍过通信时SCL上就是一个固定周期的脉冲
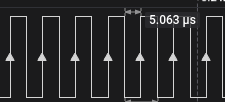
PWM有两个重要的参数,第一个是周期,就像是正弦波,其周期就是2pi,指的是多久循环一次,我们这里设置的是50HZ,也就是说20ms。
在一个周期里,引脚高电平的时间就称为占空比,这里我们设置的是0.5ms-2.5ms之间作为舵机控制的占空比范围。
换句话说,假设我们设置当前舵机角度为90度,此时占空比
占空比 = 500+90*(2500-500)/180
四、下载测试
将舵机插在S1接口,注意黄色线接蓝色信号。
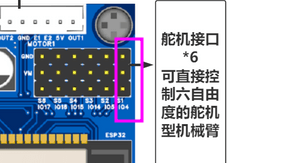
接着下载代码,观察舵机。
五、总结
本节我们通过三方库完成了对舵机的控制,下一节我们正式将舵机和超声波结合起来,测量指定角度下的距离。