datetime:2022/04/23 18:00
author:nzb
Catkin工作空间和编译系统
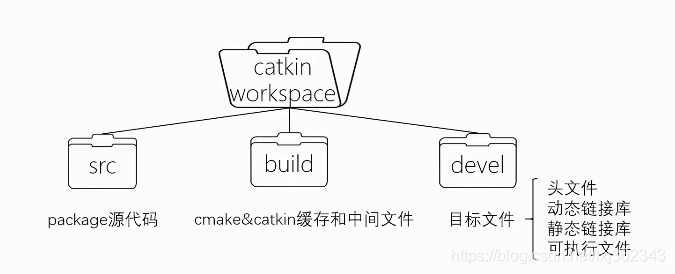
上图文件夹及文件说明
src:package 源代码(该文件就是我们写代码的所在的文件夹)build:cmake&catkin 缓存和中间文件devel:目标文件
catkin:ROS 定制的编译构建系统,对 cmake 的扩展。
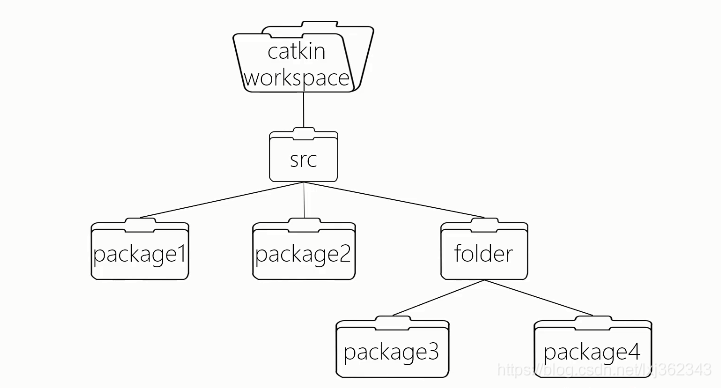
- catkin 工作空间:组织和管理功能包的文件夹,以 catkin 工具编译
$ source /opt/ros/noetic/setup.bash
# 建立工作站
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/ # 回到工作站
$ catkin_make # 编译
//$ catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
$ source devel/setup.bash # 编译完成后要 source 刷新环境
$ echo $ROS_PACKAGE_PATH
/home/youruser/catkin_ws/src:/opt/ros/kinetic/share
编译后结构目录
注意:catkin build 和 catkin_make 不能混合使用
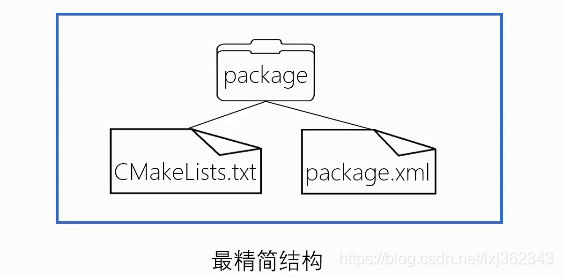
package
- ROS 软件的基本组织形式
- catkin 编译的基本单元
- 一个 package 可以包含多个可执行文件(节点)
cmake简单介绍
- CMakeLists.txt:规定 catkin 编译的规则,例如:源文件、依赖项、目标文件
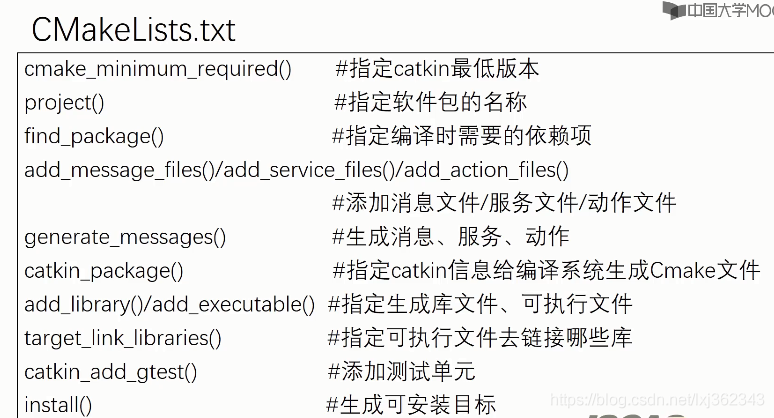
如果没有cmake基础的可以去看《cmake实践》 ,好像和《CMake Practice》是同一本书只是不同叫法或者是中英文叫法而已。
package.xml简单介绍
- package.xml:定义 package 的属性,例如:包名、版本号、作者、依赖等
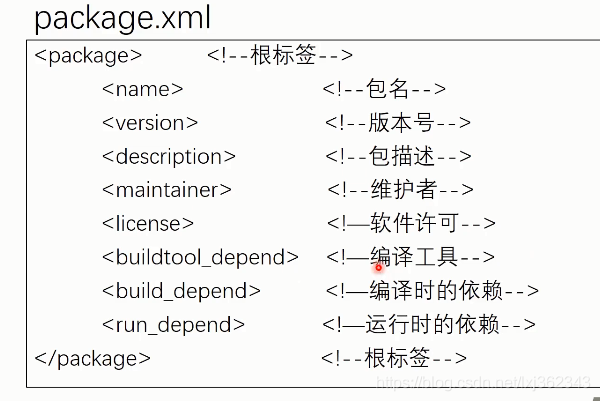
- manifest.xml:rosbuild 编译采用的包信息清单,类似 catkin 的 package.xml
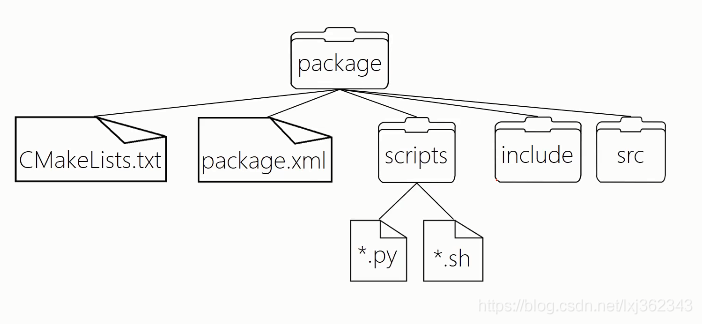
代码文件
一般代码文件可以是脚本(shell、Python)或者C++文件。
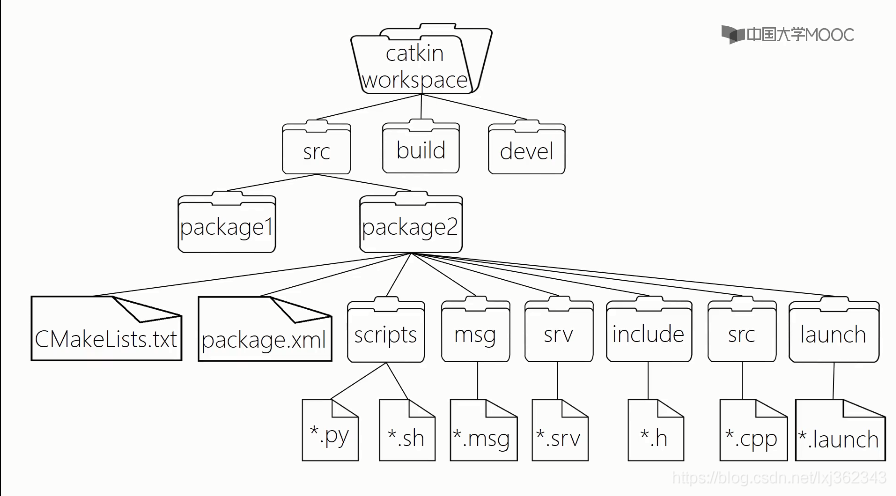
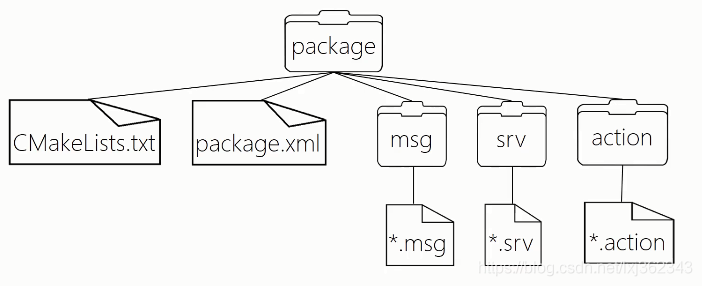
package结构示意图:
package还有有自定义通信格式的文件,包括消息(msg),服务(srv),动作(action)等
这时候package结构就像下面这样了
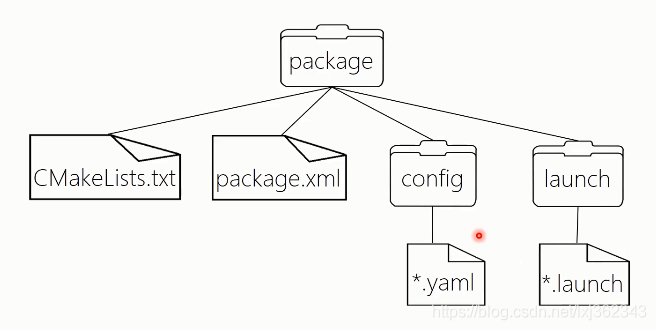
package还有launch文件,配置文件(yaml)。launch用于每次可以运行多个可执行文件。
这时候package结构图如下
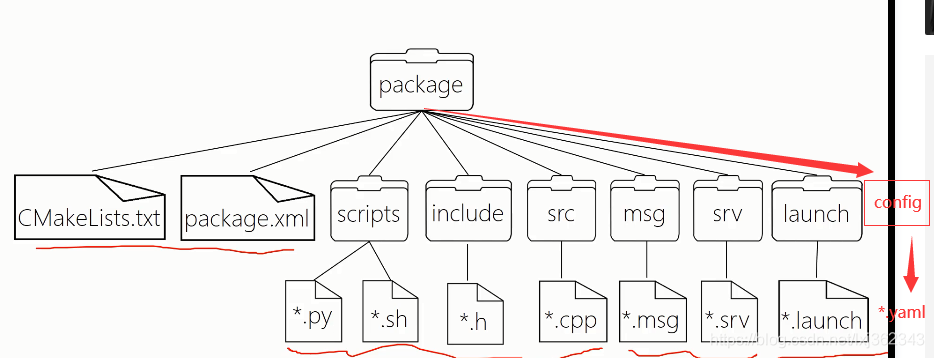
总体框架(视频缺少config文件,我添加上去了)
常用命令

在ROS的noetic版本中通过rosrun运行python文件
不要将
python文件放入src目录中,否则后续编译工作空间会报如图所示的错误。首先要在功能包文件夹(catkin_ws/src/learnning_topic)中创建一个scripts(文件夹名可任意,但默认为scripts)目录来存放python脚本文件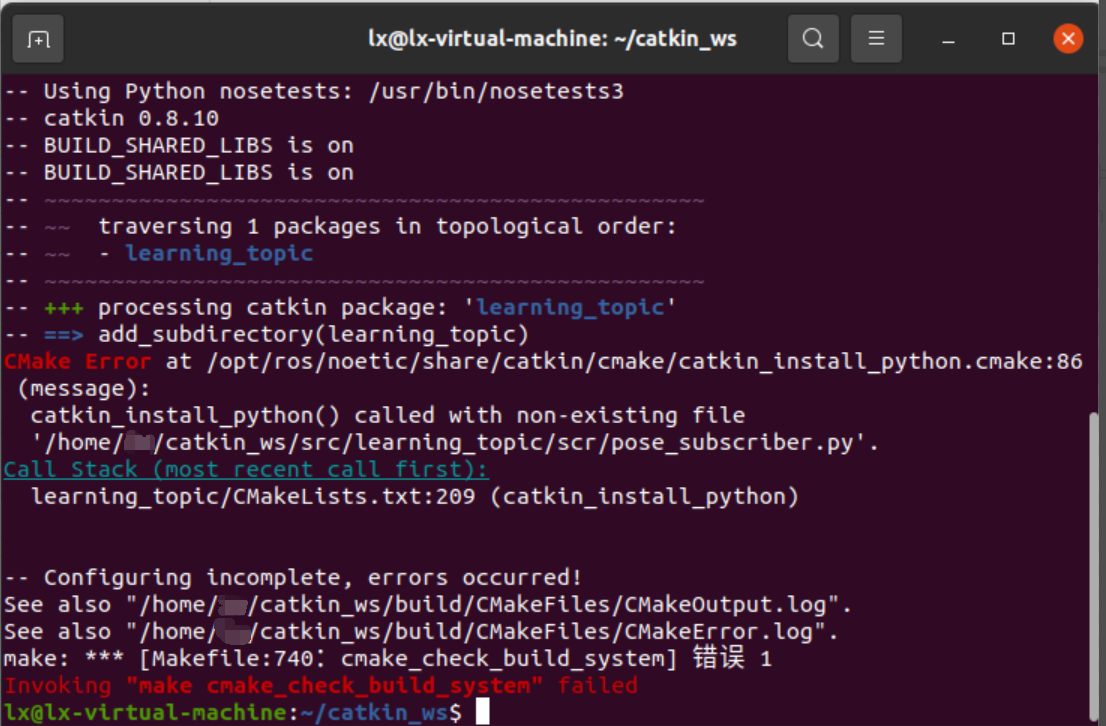
将以下内容添加到
CMakeLists.txt文件中,确保正确安装Python脚本,并使用合适的Python解释器:catkin_install_python(PROGRAMS scripts/pose_subscriber.py #代码文件夹/py文件名 DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} )多个python文件则为:
catkin_install_python(PROGRAMS scripts/pose_subscriber.py scripts/velocity_publisher.py #代码文件夹/py文件名 代码文件夹/py文件名 DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} )编译启动
cd ~/catkin_ws/ catkin_make source devel/setup.bash rosrun learnning_topic pose_subscriber.py
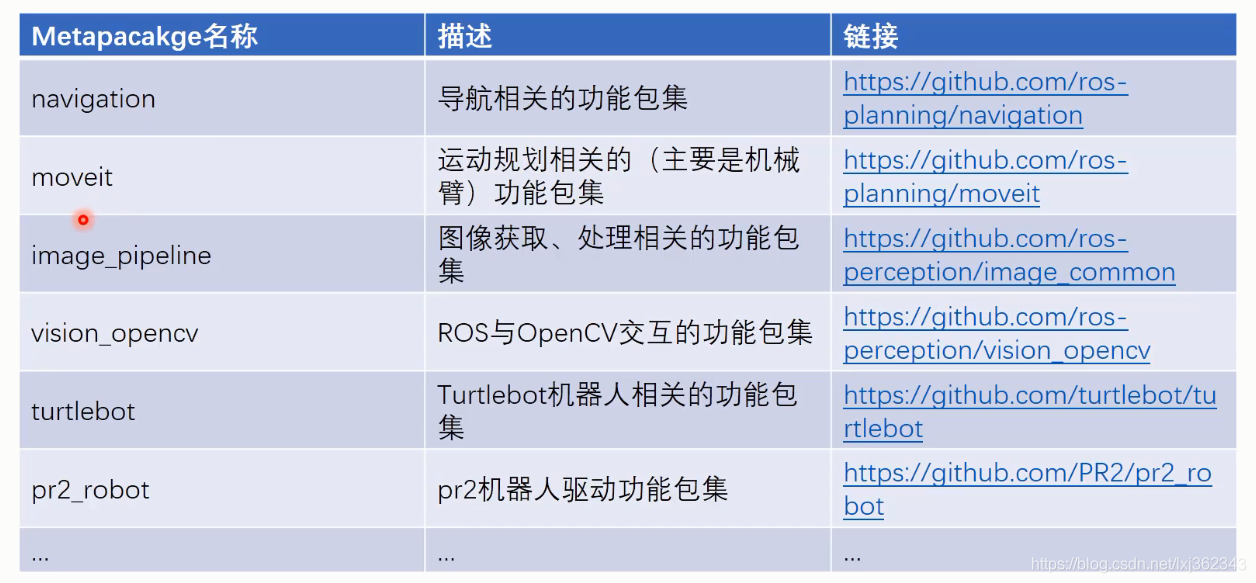
Metapackage
把一系列包组织起来,安装使用方便