datetime:2023/10/07 10:21
author:nzb
该项目来源于大佬的动手学ROS2
Gazebo仿真进阶教程之传感器高斯噪声
传感器噪声
每一个或几乎每个传感器的输出中都有噪声。相机可能有色差、声纳有多路径效应和激光会有不正确的距离读数。我们必须在仿真的传感器中添加噪声,以使得仿真的传感器和真实传感器产生的数据更加接近。
Gazebo 有一个内置的噪声模型,可以应用高斯噪声到各种传感器。虽然高斯噪声可能不是非常现实,它总比没有好,并作为一个很好的第一阶近似噪声。高斯噪声也比较容易应用于数据流。
第 1 步:可视化传感器数据
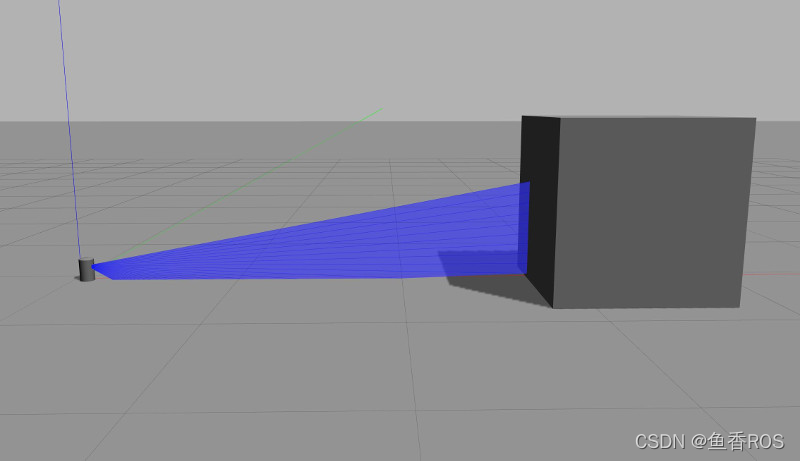
让我们从查看当前的 Velodyne 输出开始,然后我们可以添加噪声。
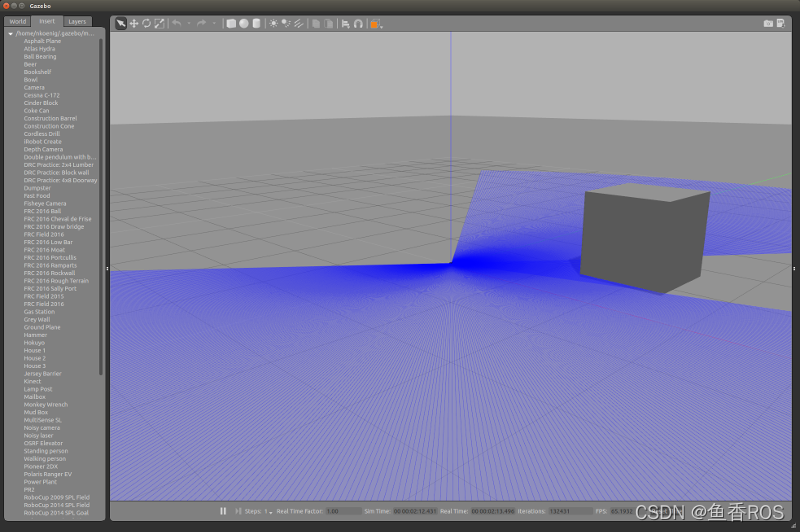
打开 Gazebo,插入 Velodyne 传感器。
gazebo
选择左上角附近的插入选项卡。
向下滚动并选择 Velodyne HDL-32 型号。
单击渲染窗口中的某个位置。
在激光束前面添加一个 Box,这样我们就可以得到有用的数据。
选择渲染窗口上方工具栏中的 Box 图标。
在激光束前左键单击以放置盒子。
我们可以通过 Gazebo 的主题可视化器仔细查看传感器数据。
- 按 Ctrl-t,打开主题选择器。找话题。
/gazebo/default/velodyne/top/sensor/scan
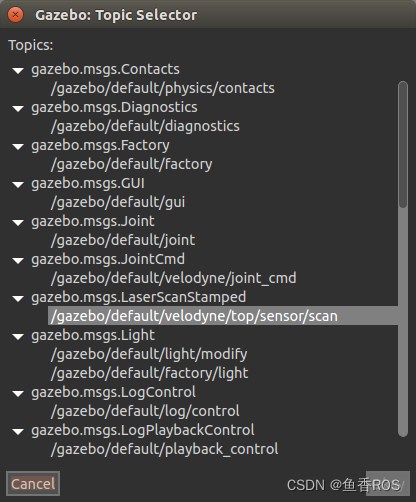
- 选择主题,然后按确定打开激光可视化器。
/gazebo/default/velodyne/top/sensor/scan
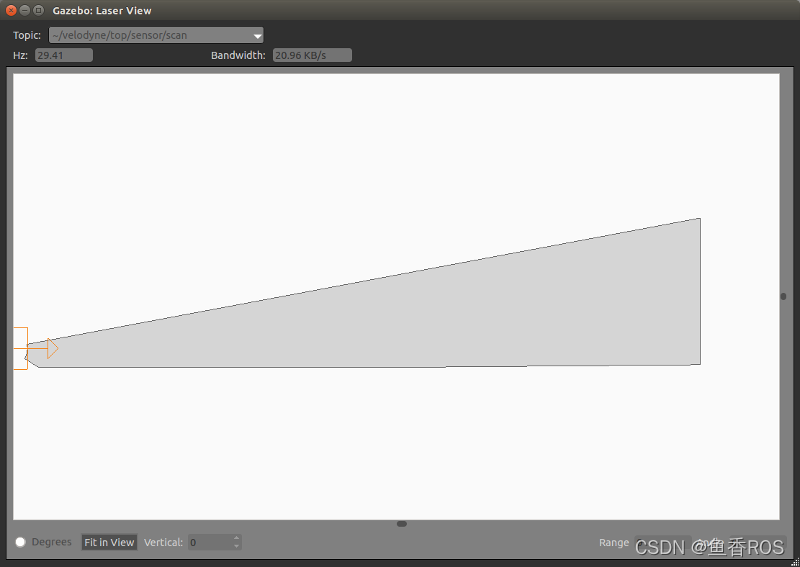
请注意输出的流畅线条。
第 2 步:向传感器添加噪声
可以使用标签访问 Gazebo 的噪声模型。有关更多信息,请参见 sdformat.org/spec。
打开 Velodyne 模型。
gedit ~/.gazebo/models/velodyne_hdl32/model.sdf
添加一个元素作为元素的子元素。我们将首先应用大量的噪点,这样效果就很容易看到了。
<sensor type="ray" name="sensor">
<pose>0 0 -0.004645 1.5707 0 0</pose>
<visualize>true</visualize>
<ray>
<noise>
<!-- Use gaussian noise -->
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.1</stddev>
</noise>
再次将 Velodyne 传感器添加到 Gazebo,并在横梁前插入一个盒子。 打开主题可视化工具 (Ctrl-t),然后选择 Velodyne 激光扫描主题。输出应该看起来很嘈杂。

现在让我们将噪音降低到合理的程度。
<sensor type="ray" name="sensor">
<pose>0 0 -0.004645 1.5707 0 0</pose>
<visualize>true</visualize>
<ray>
<noise>
<!-- Use gaussian noise -->
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.02</stddev>
</noise>
常见传感器的噪声
介绍
Gazebo提供了很多常见传感器的模型,在真实的世界,传感器都会产生噪声,因为现实中的传感器并不能完美的观察这个世界。但是在默认的情况下,Gazebo的传感器可以完美的观察仿真世界,为了让仿真更加的真实,我们会在Gazebo的传感器中添加一些噪声到Gazebo传感器生成的数据中。
Gazebo目前可以给下面几个类型的传感器添加噪声:
射线类(Ray) (例如, 雷达)
相机(Camera)
惯性测量单元(IMU)
接下来带你一一介绍。
射线类-Ray(雷达)噪声
对于射线传感器,我们将高斯噪声加入到每个波束的范围中。你可以设置平均值和标准差正态分布,从中噪声值将被采样。噪声值为每个波束独立采样。在添加噪声后,产生的范围被限制在传感器的最小和最大范围(包括在内)之间。
测试传感器噪声模型:
- 创建模型目录
mkdir -p ~/.gazebo/models/noisy_laser
- 创建模型配置文件
gedit ~/.gazebo/models/noisy_laser/model.config
- 复制粘贴下面的代码到配置文件
<?xml version="1.0"?>
<model>
<name>Noisy laser</name>
<version>1.0</version>
<sdf version='1.6'>model.sdf</sdf>
<author>
<name>My Name</name>
<email>me@my.email</email>
</author>
<description>
My noisy laser.
</description>
</model>
- 创建一个文件
~/.gazebo/models/noisy_laser/model.sdf
gedit ~/.gazebo/models/noisy_laser/model.sdf
- 粘贴以下内容,这是添加了噪声的标准 Hokuyo 模型的代码:
<?xml version="1.0" ?>
<sdf version="1.6">
<model name="hokuyo">
<link name="link">
<gravity>false</gravity>
<inertial>
<mass>0.1</mass>
</inertial>
<visual name="visual">
<geometry>
<mesh>
<uri>model://hokuyo/meshes/hokuyo.dae</uri>
</mesh>
</geometry>
</visual>
<sensor name="laser" type="ray">
<pose>0.01 0 0.03 0 -0 0</pose>
<ray>
<scan>
<horizontal>
<samples>640</samples>
<resolution>1</resolution>
<min_angle>-2.26889</min_angle>
<max_angle>2.268899</max_angle>
</horizontal>
</scan>
<range>
<min>0.08</min>
<max>10</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="laser" filename="libRayPlugin.so"/>
<always_on>1</always_on>
<update_rate>30</update_rate>
<visualize>true</visualize>
</sensor>
</link>
</model>
</sdf>
- 启动Gazebo:
gazebo
- 插入嘈杂的激光:在左侧窗格中,选择Insert选项卡,然后单击。将您的激光器放在世界某处,并在其前面放置一个盒子。Noisy laser
- 可视化嘈杂的激光:单击窗口->主题可视化(或按 Ctrl-T)以调出主题选择器。
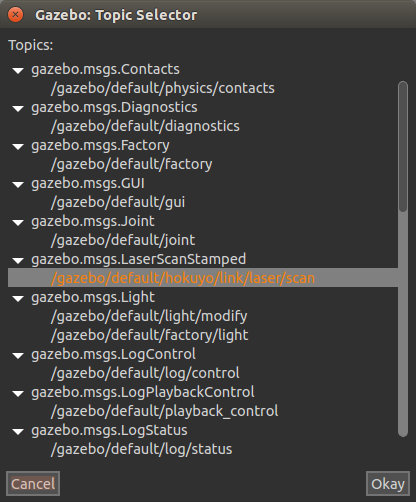
- 找到名称为 like 的主题并单击它,然后单击。您将获得一个显示激光数据的激光视图窗口。
/gazebo/default/hokuyo/link/laser/scanOkay
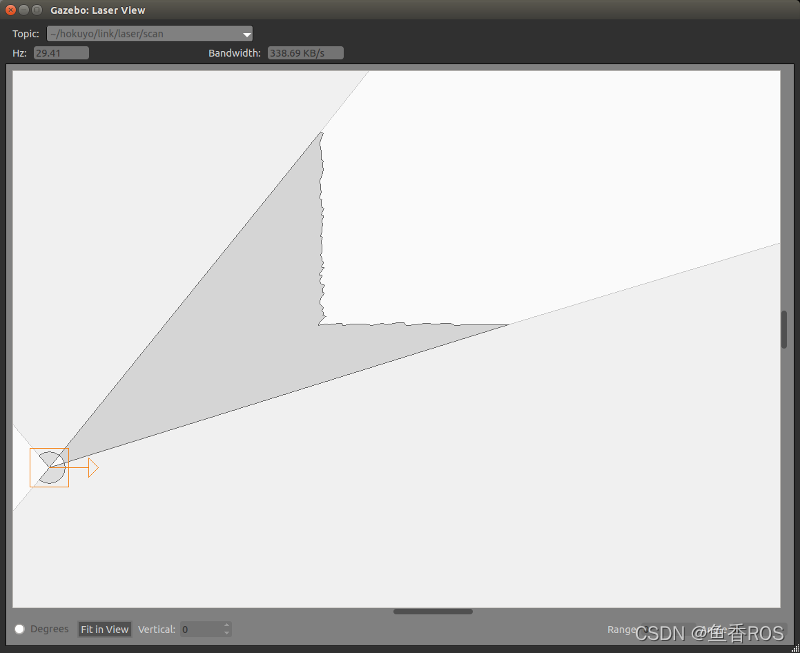
如您所见,扫描噪声很大。要调整噪声,只需调整其中的平均值和标准偏差值,其中单位是米:
model.sdf
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
这些是Hokuyo激光的合理值。
相机噪音
对于相机传感器,我们对输出放大器噪声进行建模,它为每个像素独立添加高斯采样干扰。您可以设置从中采样噪声值的高斯分布的均值和标准差。为每个像素独立采样一个噪声值,然后将该噪声值独立添加到该像素的每个颜色通道。添加噪声后,生成的颜色通道值被限制在 0.0 和 1.0 之间;这个浮点颜色值最终会在图像中作为一个无符号整数,通常在 0 到 255 之间(每个通道使用 8 位)。
此噪声模型在GLSL着色器中实现,需要 GPU 才能运行。
测试相机噪声模型:
- 创建模型目录:
mkdir -p ~/.gazebo/models/noisy_camera
- 创建模型配置文件:
gedit ~/.gazebo/models/noisy_camera/model.config
- 粘贴以下内容:
<?xml version="1.0"?>
<model>
<name>Noisy camera</name>
<version>1.0</version>
<sdf version='1.6'>model.sdf</sdf>
<author>
<name>My Name</name>
<email>me@my.email</email>
</author>
<description>
My noisy camera.
</description>
</model>
- 创建一个文件。
~/.gazebo/models/noisy_camera/model.sdf
gedit ~/.gazebo/models/noisy_camera/model.sdf
- 粘贴以下内容,这是添加了噪点的标准相机模型的副本:
<?xml version="1.0" ?>
<sdf version="1.6">
<model name="camera">
<link name="link">
<gravity>false</gravity>
<pose>0.05 0.05 0.05 0 0 0</pose>
<inertial>
<mass>0.1</mass>
</inertial>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.1 0.1</size>
</box>
</geometry>
</visual>
<sensor name="camera" type="camera">
<camera>
<horizontal_fov>1.047</horizontal_fov>
<image>
<width>1024</width>
<height>1024</height>
</image>
<clip>
<near>0.1</near>
<far>100</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.07</stddev>
</noise>
</camera>
<always_on>1</always_on>
<update_rate>30</update_rate>
<visualize>true</visualize>
</sensor>
</link>
</model>
</sdf>
- 启动Gazebo:
gazebo
插入嘈杂的摄像头:在左侧窗格中,选择
Insert选项卡,然后单击。把你的相机放在世界的某个地方。Noisy camera可视化嘈杂的摄像机:单击
Window->Topic Visualization(或按Ctrl-T)以调出Topic Selector。找到名称为 like 的主题并单击它,然后单击。您将获得一个显示图像数据的图像视图窗口。
/gazebo/default/camera/link/camera/image Okay

如果您仔细观察,您会发现图像有噪点。要调整噪声,只需调整这些是无单位的值;噪声将被添加到 [0.0,1.0] 范围内的每个颜色通道。 model.sdf
上面的例子<stddev>很高,我们尝试减少这个值:
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
这些对于像样的数码相机来说是合理的值。
IMU 噪声
对于 IMU 传感器,我们对角速率和线性加速度的两种干扰进行建模:噪声和偏差。分别考虑角速率和线性加速度,导致该模型有 4 组参数:速率噪声、速率偏差、加速度噪声和加速度偏差。没有对 IMU 的方向数据应用噪声,该数据被提取为世界框架中的完美值(这在未来应该会改变)。
噪音是可加性的,从正态分布中取样。你可以设置高斯分布的平均值和标准差(一个用于比率,一个用于加速度) ,从中将采样噪声值。噪声值为每个样本的每个组件(x,y,z)独立采样,并添加到该组件中。
偏差也是附加的,但是只在模拟开始的时候会被取样一次。你可以设置高斯分布的平均值和标准差(一个用于比率,一个用于加速度) ,从中可以采样到偏差值。偏差将根据提供的参数进行取样,然后以等概率否定; 假设所提供的平均值表示偏差的大小,并且在两个方向上都可能存在偏差。此后,偏差是一个固定值,添加到每个样品的每个组分(x,y,z)。
注意: 根据被模拟的系统和物理引擎的配置,模拟的 IMU 数据可能已经很嘈杂,因为系统没有一直被求解到收敛。因此,根据您的应用程序,可能不需要添加噪声。
测试 IMU 噪声模型:
- 创建模型目录:
mkdir -p ~/.gazebo/models/noisy_imu
- 创建模型配置文件:
gedit ~/.gazebo/models/noisy_imu/model.config
- 粘贴以下内容:
<?xml version="1.0"?>
<model>
<name>Noisy IMU</name>
<version>1.0</version>
<sdf version='1.6'>model.sdf</sdf>
<author>
<name>My Name</name>
<email>me@my.email</email>
</author>
<description>
My noisy IMU.
</description>
</model>
- 创建
~/.gazebo/models/noisy_imu/model.sdf文件
gedit ~/.gazebo/models/noisy_imu/model.sdf
- 粘贴以下内容:
<?xml version="1.0" ?>
<sdf version="1.6">
<model name="imu">
<link name="link">
<inertial>
<mass>0.1</mass>
</inertial>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.1 0.1</size>
</box>
</geometry>
</visual>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.1 0.1</size>
</box>
</geometry>
</collision>
<sensor name="imu" type="imu">
<imu>
<angular_velocity>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</z>
</angular_velocity>
<linear_acceleration>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</z>
</linear_acceleration>
</imu>
<always_on>1</always_on>
<update_rate>1000</update_rate>
</sensor>
</link>
</model>
</sdf>
- 启动Gazebo:
gazebo
插入嘈杂的
IMU:在左侧窗格中,选择Insert选项卡,然后单击。将您的IMU放在世界的某个地方。Noisy IMU可视化嘈杂的
IMU:单击Window->Topic Visualization(或按Ctrl-T)调出Topic Selector。找到名称为
like的主题并单击它,然后单击。您将获得一个显示IMU数据的文本视图窗口。/gazebo/default/imu/link/imu/imu Okay
在 IMU 等高速传感器上识别噪声可能很困难,尤其是在复杂系统中。您应该能够看到大的非零均值对噪声或偏差参数的影响。
要调整噪声,只需使用. 速率噪声和速率偏差的单位是 rad/s,加速度噪声和加速度偏差的单位是 m/s^2。
model.sdf
<angular_velocity>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</z>
</angular_velocity>
<linear_acceleration>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</z>
</linear_acceleration>
上面是一个高质量IMU的合理噪声配置值。