datetime:2023/06/02 16:21
author:nzb
BT14:registerSimpleNode相关数据传输
- 代码
#include "first_tree.h"
// using namespace DummyNodes;
class ApproachObject : public BT::SyncActionNode
{
public:
ApproachObject(const std::string &name) : BT::SyncActionNode(name, {}) {}
BT::NodeStatus tick() override
{
std::cout << "ApproachObject: " << this->name() << std::endl;
return BT::NodeStatus::SUCCESS;
}
};
class CustomCondition : public BT::ConditionNode
{
public:
CustomCondition(const std::string &name, const BT::NodeConfiguration &config) : ConditionNode(name, config) {}
static BT::PortsList providedPorts()
{
return {
BT::InputPort<std::string>("ktype"),
BT::InputPort<std::string>("key"),
BT::InputPort<std::string>("value")};
}
BT::NodeStatus tick() override
{
std::cout << "--------------------CustomCondition----------------------" << std::endl;
auto ktype = getInput<std::string>("ktype");
auto key = getInput<std::string>("key");
auto value = getInput<std::string>("value");
std::cout << "ktype: " << ktype.value() << std::endl;
std::cout << "key: " << key.value() << std::endl;
std::cout << "value: " << value.value() << std::endl;
std::cout << "--------------------CustomCondition----------------------\n\n\n"
<< std::endl;
return BT::NodeStatus::SUCCESS;
}
};
class GripperInterface
{
public:
GripperInterface() : _open(true) {}
BT::NodeStatus open(BT::TreeNode &self)
{
std::cout << "-------------------GripperInterface open start ---------------------------" << std::endl;
// 打印黑板的键和值
auto vector = self.config().blackboard->getKeys();
for (auto i = vector.begin(); i != vector.end(); i++)
{
std::string key_v;
self.config().blackboard->get(i->to_string(), key_v);
std::cout << "blackboard key is: " << *i << " value is: " << key_v << std::endl;
}
std::cout << "-------------------blackboard debugMessaget ---------------------------" << std::endl;
self.config().blackboard->debugMessage();
std::cout << "-------------------blackboard debugMessaget ---------------------------\n\n"
<< std::endl;
// 不同方法改变黑板 key1 中的值
std::cout << "\nsetOutput open3, the value is: 456, the blackboard key is 'key1' \n";
std::string key1_v;
self.setOutput("open3", "456");
self.config().blackboard->get("key1", key1_v);
std::cout << "get blackboard 'key1' value --->" << key1_v << std::endl;
std::cout << "\nself.config().blackboard->set(\"key1\", \"789\");, the value is: 789, the blackboard key is 'key1' \n";
self.config().blackboard->set("key1", "789");
self.config().blackboard->get("key1", key1_v);
std::cout << "self.config().blackboard->get blackboard 'key1' value --->" << key1_v << std::endl;
std::cout << "\nsetOutput open3, the value is: abc, the blackboard key is 'key1' \n";
self.setOutput("open3", "abc"); // open3 指向了黑板 key1
self.getInput("open4", key1_v); // open4 指向了黑板 key1,所以取出来上面修改后的值,未指定类型需要第二个参数
std::cout << "self.getInput blackboard 'key1' value --->" << key1_v << std::endl;
std::cout << "-------------------port and blackboard size ---------------------------" << std::endl;
std::cout << "input_post size: " << self.config().input_ports.size() << std::endl; // 取的都是当前节点的输入数量
std::cout << "output_ports size: " << self.config().output_ports.size() << std::endl; // 取的都是当前节点的输出数量
std::cout << "blackboard size: " << self.config().blackboard->getKeys().size() << std::endl; // 取的都是当前树的黑板数量
std::cout << "-------------------port and blackboard size ---------------------------" << std::endl;
std::cout << "open1: " << self.config().input_ports.find("open1")->second << std::endl;
std::cout << "open2: " << self.config().input_ports.find("open2")->second << std::endl; // 取到值不是预期的,应该使用 getInput 拿到映射的黑板值,下一个为示例
std::cout << "open2: " << self.getInput<std::string>("open2").value() << std::endl; // getInput指定了类型不需要第二个参数,直接获取
// std::cout << "open3: " << self.getInput<std::string>("open3").value() << std::endl; // open3 是 OutputPort 类型,不能获取,只能设置
std::cout << "open4: " << self.getInput<std::string>("open4").value() << std::endl;
_open = true;
std::cout << "-------------------GripperInterface open end ---------------------------\n\n\n"
<< std::endl;
std::this_thread::sleep_for(std::chrono::seconds(2));
return BT::NodeStatus::SUCCESS;
}
BT::NodeStatus close()
{
_open = false;
std::cout << "GripperInterface::close" << std::endl;
std::this_thread::sleep_for(std::chrono::seconds(2));
return BT::NodeStatus::SUCCESS;
}
private:
bool _open;
};
void ports_demo()
{
BT::BehaviorTreeFactory factory;
factory.registerNodeType<ApproachObject>("ApproachObject");
factory.registerNodeType<CustomCondition>("CustomCondition");
GripperInterface gripper;
BT::PortsList ports = {BT::InputPort<std::string>("open1"),
BT::InputPort<std::string>("open2"),
BT::OutputPort<std::string>("open3"),
BT::InputPort<std::string>("open4")};
factory.registerSimpleAction("OpenGripper", std::bind(&GripperInterface::open, gripper, std::placeholders::_1), ports);
factory.registerSimpleAction("CloseGripper", std::bind([&]()
{ return gripper.close(); }));
auto tree = factory.createTreeFromFile("../src/study/xmls/001_ports_demo.xml");
BT::PublisherZMQ pub_zmq(tree);
tree.tickRootWhileRunning();
}
- 行为树
<root main_tree_to_execute="MainTree">
<!-- ////////// -->
<BehaviorTree ID="MainTree">
<Sequence name="root_sequence">
<SetBlackboard output_key="key" value="-1;3;2"/>
<SetBlackboard output_key="key1" value="321"/>
<Condition ID="CustomCondition" key="{key}" ktype="{key1}" name="custion_condition" value="789"/>
<Action ID="OpenGripper" name="open_gripper" open1="open1_val" open2="{key}" open3="{key1}" open4="{key1}"/>
<Action ID="ApproachObject" name="approach_object"/>
<Action ID="CloseGripper" name="close_gripper"/>
</Sequence>
</BehaviorTree>
<!-- ////////// -->
<TreeNodesModel>
<Action ID="ApproachObject"/>
<Action ID="CloseGripper"/>
<Condition ID="CustomCondition">
<inout_port name="key"/>
<inout_port name="ktype"/>
<inout_port name="value"/>
</Condition>
<Action ID="OpenGripper"/>
</TreeNodesModel>
<!-- ////////// -->
</root>
- 结果
--------------------CustomCondition----------------------
ktype: 321
key: -1;3;2
value: 789
--------------------CustomCondition----------------------
-------------------GripperInterface open start ---------------------------
blackboard key is: key1 value is: 321
blackboard key is: key value is: -1;3;2
-------------------blackboard debugMessaget ---------------------------
key1 (std::string) -> full
key (std::string) -> full
-------------------blackboard debugMessaget ---------------------------
setOutput open3, the value is: 456, the blackboard key is 'key1'
get blackboard 'key1' value --->456
self.config().blackboard->set("key1", "789");, the value is: 789, the blackboard key is 'key1'
self.config().blackboard->get blackboard 'key1' value --->789
setOutput open3, the value is: abc, the blackboard key is 'key1'
self.getInput blackboard 'key1' value --->abc
-------------------port and blackboard size ---------------------------
input_post size: 3
output_ports size: 1
blackboard size: 2
-------------------port and blackboard size ---------------------------
open1: open1_val
open2: {key}
open2: -1;3;2
open4: abc
-------------------GripperInterface open end ---------------------------
ApproachObject: approach_object
GripperInterface::close
结论
OutputPort:只能setOutput操作InputPort:只能getInput操作registerSimpleAction- 简单节点可以提供
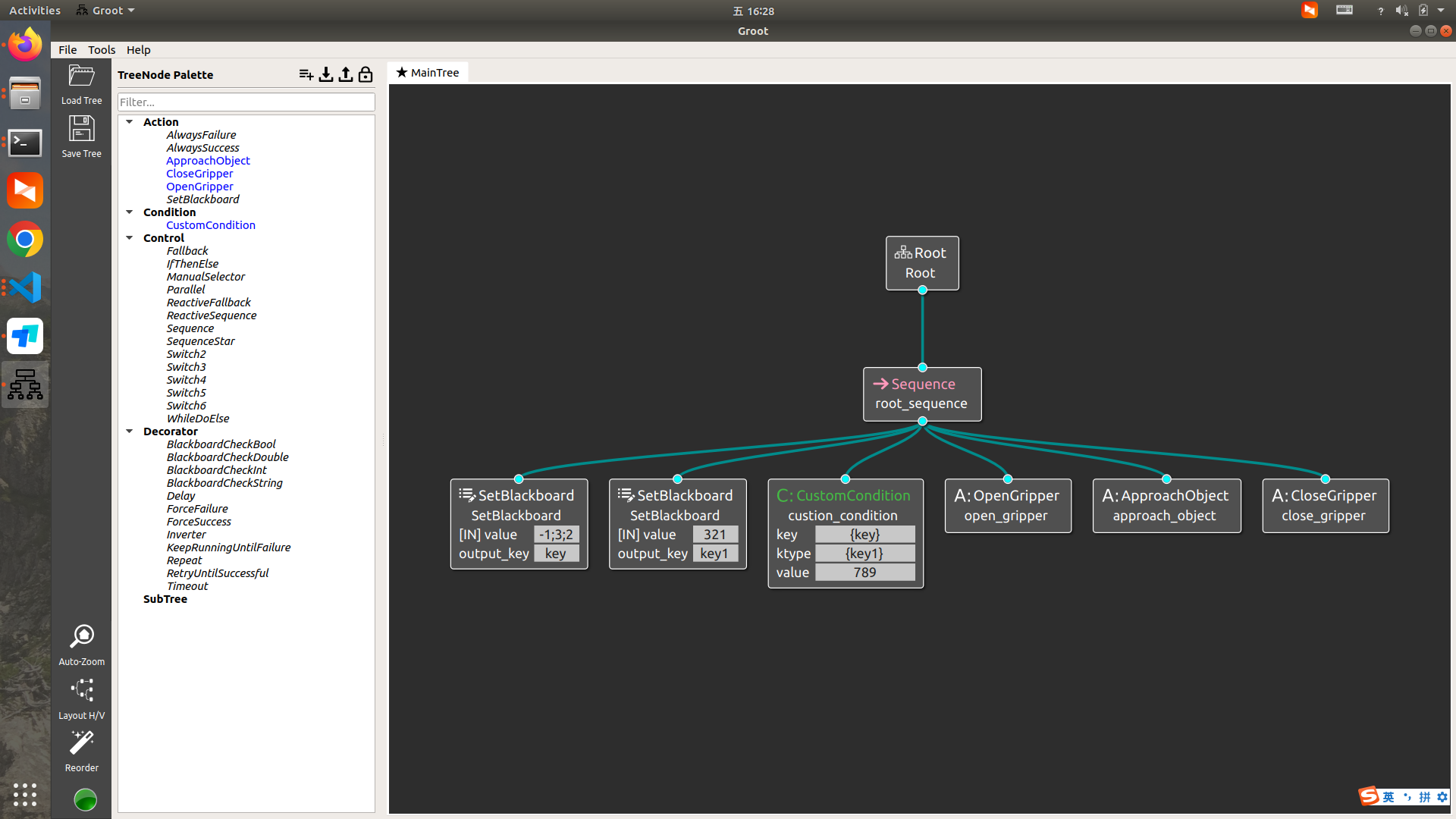
ports,但是在Groot工具中刚开始不显示,需要再xml中TreeNodesModel对应节点上加上参数,如上图的CustomCondition节点一样 - 操作数据,前提条件函数需要添加一个节点参数,如:
open(BT::TreeNode &self); factory.registerSimpleAction("OpenGripper", std::bind(&GripperInterface::open, gripper, std::placeholders::_1), ports);std::placeholders::_1:占位使用- 读取
ports数据:self.getInput- 写法1,指定类型:
Position2D data = self.getInput<Position2D>("key"); - 写法2,先声明了数据:
Position2D pos; self.getInput("key", pos);
- 写法1,指定类型:
- 设置
ports数据:self.setOutput - 读取黑板数据:
std::string key1_v; self.config().blackboard->get("key1", key1_v); - 设置黑板数据:
self.config().blackboard->set("key1", "789");
- 简单节点可以提供