datetime:2023/11/08 16:27
author:nzb
该项目来源于大佬的动手学ROS2
3.建图前准备2-发布 Odom 的 TF
上一节我们简单了解了 ROS 中对移动机器人坐标系变换的规定如下:
运行建图算法时,会得到 map 到 odom 之间的TF,base_link 到 雷达或者IMU 之间的坐标关系一般使用URDF进行描述,然后使用 robot_state_publisher 进行发布,也可以使用静态TF直接发布。
而 odom 到 base_link 之间的TF就需要我们从里程计中提取并发布,本节我们主要的工作就是订阅 里程计话题 发布 odom 到 base_link 之间的 TF 变换。
关于base_link和base_footprint 的区别
在机器人领域中,"base_link"和"base_footprint"是ROS(Robot Operating System)中两个常用的坐标系(frames)名称。它们用于表示机器人的基本参考坐标系,但在某些情况下,它们可能会有一些微妙的区别。
base_link: "base_link"通常用于表示机器人的实际底盘或主体的坐标系。这个坐标系通常与机器人的物理结构直接相关,它可能位于机器人底盘的中心或者其他适当的位置。例如,对于一个移动机器人,"base_link"的原点可能位于机器人的几何中心或底盘的旋转中心,这取决于机器人的设计。
base_footprint: "base_footprint"则更多地被用作机器人在地面上的一个虚拟平面的参考点,通常是机器人底盘的投影点。这个坐标系通常位于机器人底盘底部,用于表示机器人与地面的接触点。它可以被认为是机器人底部的一个虚拟标记,用来执行路径规划、避障和定位等任务。
在许多情况下,"base_link"和"base_footprint"的坐标原点可能是相同的,但它们的用途和表示方式略有不同。例如,在路径规划中,可能更常用"base_footprint",因为它更接近机器人在地面上的实际位置,有助于避免碰撞。而在其他情况下,如控制机器人的运动,使用"base_link"可能更合适,因为它更直接地与机器人的物理结构相联系。
一、创建功能包
创建fishbot工作空间和功能包fishbot_bringup
mkdir -p ~/fishbot_ws/src
cd ~/fishbot_ws/src
ros2 pkg create --build-type ament_cmake fishbot_bringup
二、编写代码
在 src/fishbot_bringup/src/ 下新建 fishbot_bringup.cpp
#include <rclcpp/rclcpp.hpp>
#include <nav_msgs/msg/odometry.hpp>
#include <tf2/utils.h>
#include <tf2_ros/transform_broadcaster.h>
class TopicSubscribe01 : public rclcpp::Node
{
public:
TopicSubscribe01(std::string name) : Node(name)
{
// 创建一个订阅者,订阅"odom"话题的nav_msgs::msg::Odometry类型消息
odom_subscribe_ = this->create_subscription<nav_msgs::msg::Odometry>(
"odom", rclcpp::SensorDataQoS(),
std::bind(&TopicSubscribe01::odom_callback, this, std::placeholders::_1));
// 创建一个tf2_ros::TransformBroadcaster用于广播坐标变换
tf_broadcaster_ = std::make_unique<tf2_ros::TransformBroadcaster>(this);
}
private:
rclcpp::Subscription<nav_msgs::msg::Odometry>::SharedPtr odom_subscribe_;
std::unique_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_;
nav_msgs::msg::Odometry odom_msg_;
// 回调函数,处理接收到的odom消息
void odom_callback(const nav_msgs::msg::Odometry::SharedPtr msg)
{
(void)msg;
RCLCPP_INFO(this->get_logger(), "接收到里程计信息->底盘坐标系 tf :(%f,%f)",
msg->pose.pose.position.x, msg->pose.pose.position.y);
// 更新odom_msg_的姿态信息
odom_msg_.pose.pose.position.x = msg->pose.pose.position.x;
odom_msg_.pose.pose.position.y = msg->pose.pose.position.y;
odom_msg_.pose.pose.position.z = msg->pose.pose.position.z;
odom_msg_.pose.pose.orientation.x = msg->pose.pose.orientation.x;
odom_msg_.pose.pose.orientation.y = msg->pose.pose.orientation.y;
odom_msg_.pose.pose.orientation.z = msg->pose.pose.orientation.z;
odom_msg_.pose.pose.orientation.w = msg->pose.pose.orientation.w;
};
public:
// 发布坐标变换信息
void publish_tf()
{
geometry_msgs::msg::TransformStamped transform;
double seconds = this->now().seconds();
transform.header.stamp = rclcpp::Time(static_cast<uint64_t>(seconds * 1e9));
transform.header.frame_id = "odom";
transform.child_frame_id = "base_footprint";
transform.transform.translation.x = odom_msg_.pose.pose.position.x;
transform.transform.translation.y = odom_msg_.pose.pose.position.y;
transform.transform.translation.z = odom_msg_.pose.pose.position.z;
transform.transform.rotation.x = odom_msg_.pose.pose.orientation.x;
transform.transform.rotation.y = odom_msg_.pose.pose.orientation.y;
transform.transform.rotation.z = odom_msg_.pose.pose.orientation.z;
transform.transform.rotation.w = odom_msg_.pose.pose.orientation.w;
// 广播坐标变换信息
tf_broadcaster_->sendTransform(transform);
}
};
int main(int argc, char **argv)
{
// 初始化ROS节点
rclcpp::init(argc, argv);
// 创建一个TopicSubscribe01节点
auto node = std::make_shared<TopicSubscribe01>("fishbot_bringup");
// 设置循环频率
rclcpp::WallRate loop_rate(20.0);
while (rclcpp::ok())
{
// 处理回调函数
rclcpp::spin_some(node);
// 发布坐标变换信息
node->publish_tf();
// 控制循环频率
loop_rate.sleep();
}
// 关闭ROS节点
rclcpp::shutdown();
return 0;
}
修改CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(fishbot_bringup)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(nav_msgs REQUIRED)
find_package(tf2 REQUIRED)
find_package(tf2_ros REQUIRED)
set(dependencies
rclcpp
geometry_msgs
nav_msgs
tf2
tf2_ros
)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)
add_executable(fishbot_bringup src/fishbot_bringup.cpp)
target_include_directories(fishbot_bringup PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>)
target_compile_features(fishbot_bringup PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17
ament_target_dependencies(fishbot_bringup
${dependencies}
)
install(TARGETS fishbot_bringup
DESTINATION lib/${PROJECT_NAME})
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
三、测试运行
编译运行节点
colcon build
source install/setup.bash
ros2 run fishbot_bringup fishbot_bringup
接着运行MicroROS Agent,发布 odom 话题出来
ros2 run fishbot_bringup fishbot_bringup
---
[INFO] [1692340618.330952225] [fishbot_bringup]: recv odom->base_footprint tf :(0.001754,0.000030)
[INFO] [1692340618.379986197] [fishbot_bringup]: recv odom->base_footprint tf :(0.001754,0.000030)
[INFO] [1692340618.434032295] [fishbot_bringup]: recv odom->base_footprint tf :(0.001754,0.000030)
[INFO] [1692340618.480949009] [fishbot_bringup]: recv odom->base_footprint tf :(0.001754,0.000030)
[INFO] [1692340618.535952833] [fishbot_bringup]: recv odom->base_footprint tf :(0.001754,0.000030)
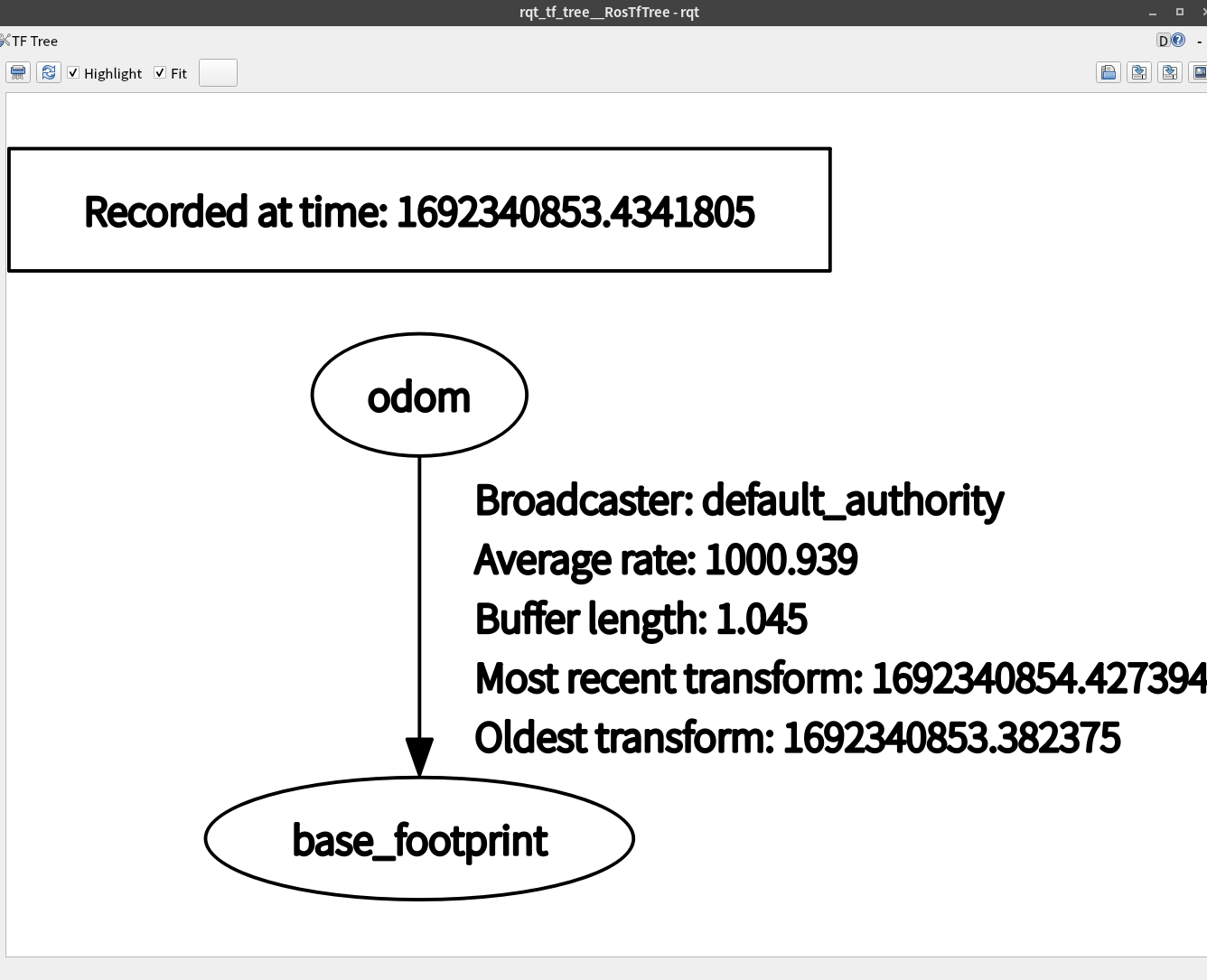
接着我们来查看下TF
ros2 run rqt_tf_tree rqt_tf_tree
结果如下
四、总结
有了 odom 到 base_link/base_footprint 之间的变换,接下来我们来搞定 base_link 到机器人各个组件之间的变换。